DEUKYX-193-1100_G5S2_VOL1.pdf - 第97页
DEUKYX 1-43 193-1100 4.7 Bauteilbestückung 4.7 Bauteilbestückung Im LP-Positionierungsbereich verfährt der Bestückkopf anhand der Daten des Bestückungsprogramms in den Bereich über der xierten Leiterplatte (Koordinaten …
DEUKYX
1-42193-1100
4.6 Bauteilerkennung
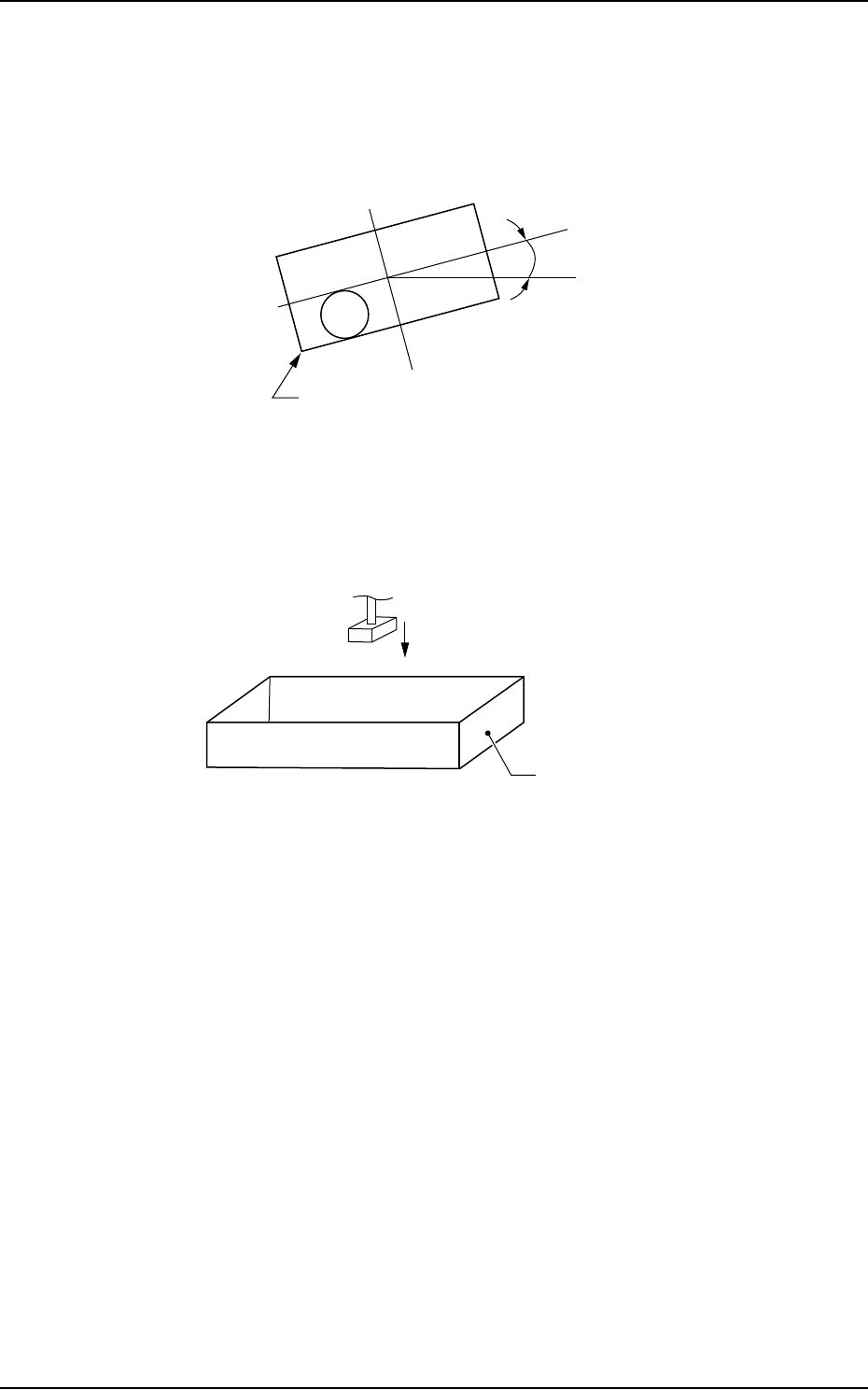
Korrektur (Winkelkorrektur)
Durch die Drehung des Kopfes wird das Bauteil in dem Winkel, der durch
das Bestückungsprogramm vorgegeben ist, ausgerichtet. Dabei wird die
Winkelabweichung (
q
), die durch das Erkennungssystem ermittelt wurde,
berücksichtigt.
Bauteil
θ
F1A35
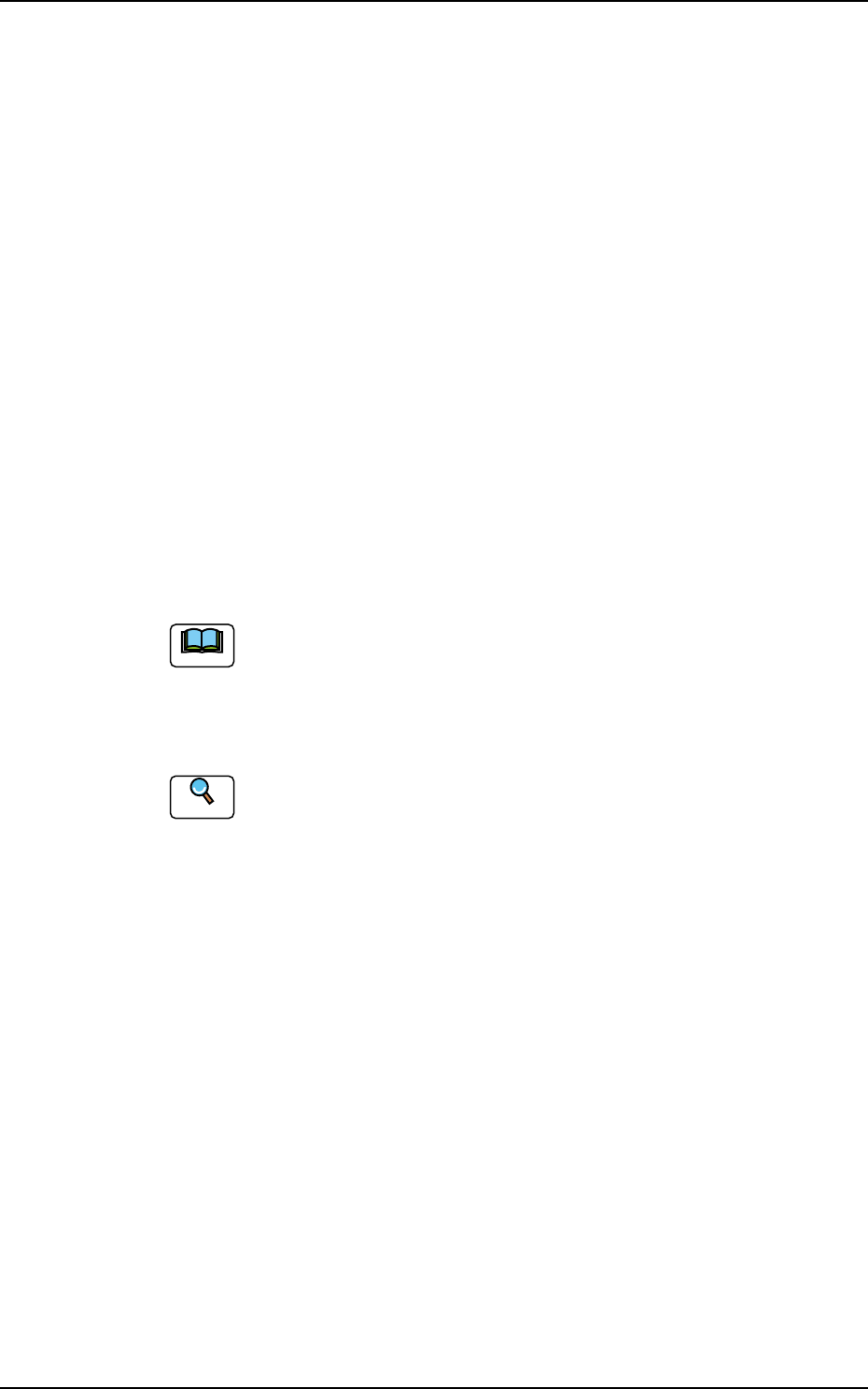
Bauteilablage (Ablagebehälter)
Kommt es bei dem Erkennungsvorgang zu einem Fehler, fährt der
Bestückungskopf zum Ablagebehälter und legt das fehlerhafte Bauteil ab.
Bauteilbehälter
F1A36
DEUKYX
1-43193-1100
4.7 Bauteilbestückung
4.7 Bauteilbestückung
Im LP-Positionierungsbereich verfährt der Bestückkopf anhand der Daten
des Bestückungsprogramms in den Bereich über der xierten Leiterplatte
(Koordinaten für die Platzierung). Dabei werden die von der Bauteilerkennung
ermittelten Korrekturwerte für die X/Y-Position für eine korrekte Positionierung
übernommen.
Der untere Höhenwert des Vakuumaufnehmers wird aus den Daten der
Bauteilbibliothek übernommen.
Das Magnetventil schließt und das aufgenommene Bauteil wird auf die
Leiterplatte platziert.
Der vordere und der hintere Träger führen alternativ die Bauteilplatzierung und
-aufnahme aus, um eine efziente und kontinuierliche Bauteilpositionierung zu
erreichen.
4.8 LP entladen
Die bereits bestückten Leiterplatten werden über den Puffer zur nachgeschalteten
Maschine transportiert.
Hinweis
Wenn die Standardausgabemethode verwendet wird und die LP-
Transportgeschwindigkeit der nachgeschalteten Maschine niedriger ist, stellen
Sie dieselbe Geschwindigkeit für die Bestückungsmaschine ein.
Stellen Sie „Ausgabetransportgeschwindigkeit (Vorgabewert: 300 [mm/s])“
unter „LP-Transfer-Mode“ auf den Wert der nachgeschalteten Maschine ein.
Referenz
Details nden Sie unter „3.2 PCB Transfer Mode“ in „Kapitel 2 (Band 3)“.

DEUKYX
1-44193-1100
5. Verschiedene Funktionen
5. Verschiedene Funktionen
5.1 PEC-Erkennungsfunktion
Normalerweise verfügt eine Leiterplatte über zwei Passermarken. Die PEC-
Kamera ermittelt die Abweichung zwischen der Position und den gespeicherten
Koordinaten. Diese Funktion korrigiert anhand der erkannten Abweichung
automatisch die Bestückungsposition der Bauteile.
Man unterscheidet drei Arten der PEC-Erkennung - „Global“, „Bild“ und
„Lokal“. Die globale Erkennungsfunktion erkennt alle Positionsabweichungen
auf einer Leiterplatte und korrigiert diese. Die Bild-Erkennungsfunktion korrigiert
Positionsabweichungen für jedes einzelne Muster. Die lokale Erkennungsfunktion
korrigiert Positionsabweichungen für jede einzelne Bauteilbestückungsposition.
Hinweis
(a) Wenn Leiterplatten aim LP-Positionierbereich positioniert werden und
die mechanische Positioniergenauigkeit aufgrund unterschiedlicher
Außenabmessungen der Leiterplatten variiert, kann die PEC-
Erkennungsfunktion wirksam dazu beitragen, eine solche Ungenauigkeit zu
reduzieren.
(b) Passermarken dienen der Positionierung des Bestückungsmusters.
Daher muss das Positionsverhältnis zwischen Passermarken und
Bestückungsmuster immer konstant sein. Anderenfalls kann die
Bestückungsgenauigkeit nicht verbessert werden.
5.2 Funktionen zur Bauteilaufnahme und -bestückung
5.2.1 Automatische Feeder-Achsenjustierung
Soll ein Bauteil von einem Aufnehmer aufgenommen werden und hat es dabei
einen Versatz zur korrekten Aufnahmeposition, verwendet diese Funktion das
Bilderkennungssystem, um die Abweichung auszugleichen und eine korrekte
Bestückung zu gewährleisten.
Durch Übertragung des Korrekturwerts an die die Aufnahmeposition kann diese
nahe an die vorgegebene Position gebracht werden.
5.2.2 Aufnahmeposition-Lehrnfunktion
Wenn ein Guert-Feeder herausgezogen oder eingesetzt wird, wird die Position
des Feeders automatisch erkannt und die erkannte Position wird an die
Daten der Aufnahmeposition zurückgemeldet, wodurch es möglich wird, die
Aufnahmeposition so nahe wie möglich an die genaue (spezizierte) Position zu
bringen.