CP643E.pdf - 第31页
FK-9F98-05 CP-643E Training Text for Service Engineers Edition 5.0 Chapter 3. X, Y, Z and D-axes Adjustment [ 12 /26] Fuji Machine Mfg. Co., Ltd. Okazaki SMT Equipment Quality Assurance Dept. Technical Support Div. Secti…
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 3. X, Y, Z and D-axes Adjustment [11/26]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
3-11
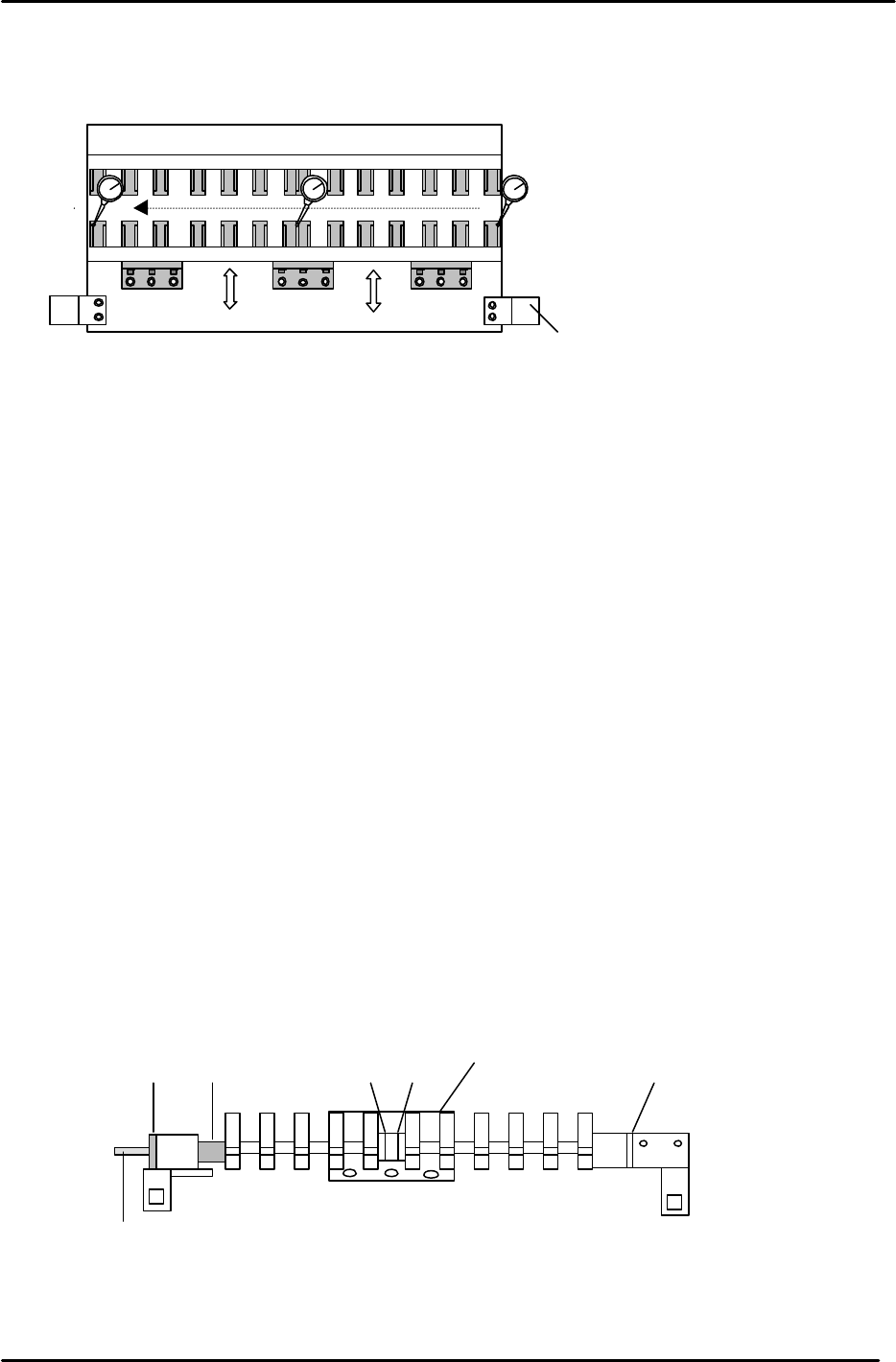
4. After the positioning has been completed in part 3, an alignment check of the reference rail in
the X-direction is necessary. Carry out the alignment check as indicated in Fig 16.
(Tolerance: within 0.1mm.)
5. Check the following positions again, after completing step 4, to ensure they remain within
tolerance.
3-8.1 (Part 2) – Reference and Adjustable Rail Alignment in the Y direction
3-8.1 (Part 3) – Origin Pin To Claw
3.8.4 (Part 4) Mechanical Lock Ring Adjustment
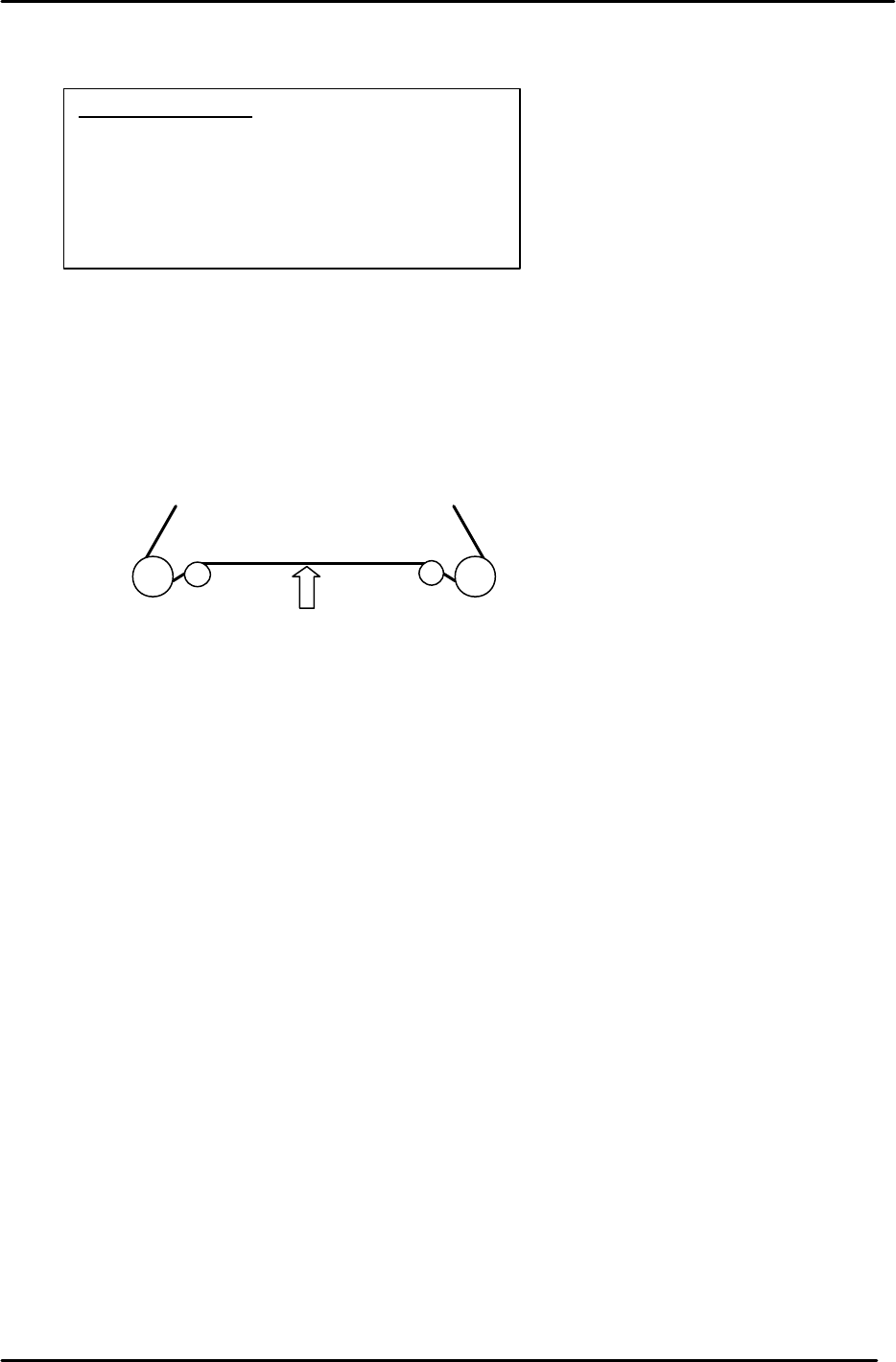
1. On the reference rail, check that the gap between the white plastic washer and the far right clamper
bracket is less than 0.3mm. If not, loosen the mechanical lock and the bolts on the far right clamper
bracket, then adjust the position of the clamper rod until the gap closes.
2. Check that the center base of the reference rail is pulled right up against the lip of the reference rail.
Check that a 0.03mm feeler gauge cannot go into the gap between the two.
3. Confirm all of the claws on the reference rail are loose and then loosen the mechanical lock.
4. Lock the reference rail at its unclamp position.
5. With the reference rail unclamped, lock the four bolts (on the mechanical lock) in rotation with a 2Nm
torque wrench.
6. For details of the location of various parts described above see Fig.17.
7. Finally clamp and unclamp the reference rail to check the clamping balance between the left and
right clamping brackets. If there is an imbalance, repeat steps 3 to 5 above until a balance is
achieved.
Reference rail
Clamping cylinder
* Loosen 13 bolts
*
*
*
*
*
*
*
*
*
*
*
*
*
Figure 16
Clamper Rod
Washer 1
Washers 2 and 3
Spring
Fixed Rail Clamper Assy. Positioning
Center Base
Mechanical lock
Figure 17
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 3. X, Y, Z and D-axes Adjustment [12/26]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
3-12
3.9 Z -axis Zero Setting (0.002mm/Pulse)
Note: The table must be level before making Z-axis adjustments.
1. Set the tension of the Z-axis timing belt as follows:
CP-643E = 100 +/- 2 Hz.
Measure the belt at a position where the span is the longest (front or back)
2. Remove the minus OT flag for the Z-axis.
3. Loosen the mechanical lock at the Z-axis drive pulley. (make sure the motor shaft turns freely)
4. In Mecha-check mode, complete zero setting by blocking the zero set sensor with a scale.
5. Inch the Z servo count to – 900 pulses.
6. Lower the Z-axis toward the (–) mechanical stopper and insert a 0.2mm feeler gauge between
the stopper and base of the table.
8. Lock the four securing bolts for the mechanical lock with a 1N.m torque wrench.
9. Check that the pulse count is close to – 900 with a 0.2 gauge between the minus stopper and
table.
10. Attach the – OT flag with the pulse count at – 500 pulses.
11. To set the software travel limit, find the pulse count where the minus OT sensor just turns ON.
Set the Z Min limit position at the host PC.
Note: Set the Maximum limit after the loader adjustment has been completed.
(Refer to the tables in step 13 for details)
Equipment Checklist
1- 3mm L-wrench
1- 4mm T-wrench
1- Tension Meter
1- 1Nm torque wrench with 2mm attachment
1- 0.2 mm feeler gauge
1- 2.5mm T-wrench
Measuring point
Figure 18
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 3. X, Y, Z and D-axes Adjustment [13/26]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
3-13
12. Lift the Z-axis to the + mechanical stopper and ensure the pulse count is within the following
range.
(CP-643E) 23650±250
13. Check the sensor reaction in I/O.
<I/O à ETC à Servo 1 à IN>
SX00C Z AXIS + OT
SX00D Z AXIS – OT
SX00E Z AXIS ZERO
14. The following table lists the Z axis proper and physical data reference values.
Z-axis Servo Count Values
Z-axis Servo counter table 0.002mm/Pulse Standard Value (Reference value)
Plus Mechanical Stopper 23650±250
Max Limit Pos. Z Same as plus OT sensor value
Plus OT Sensor <SX00C> {ZL (Upper) +500}+/-50
Loading Pos. ZL IN 22400 to 22900
Loading Pos. ZL OUT 22400 to 22900
Middle Loading Pos. ML ZL (Lower) – 10500
Upward End Sensor 1 ON ML –125±50
Upward End Sensor 2 ON Z0 + 2300±50
Downward End Sensor OFF Z0 + 400±50
Middle OT Sensor ON Z0 + 150±50
Z0 5500±300
Zero Set Sensor ON <SX00E> 1000±50
Minus OT Sensor ON <SX00D> – 500±50
Min Limit Pos. Z Same as minus OT sensor value
Minus Mechanical Stopper – 1000±50
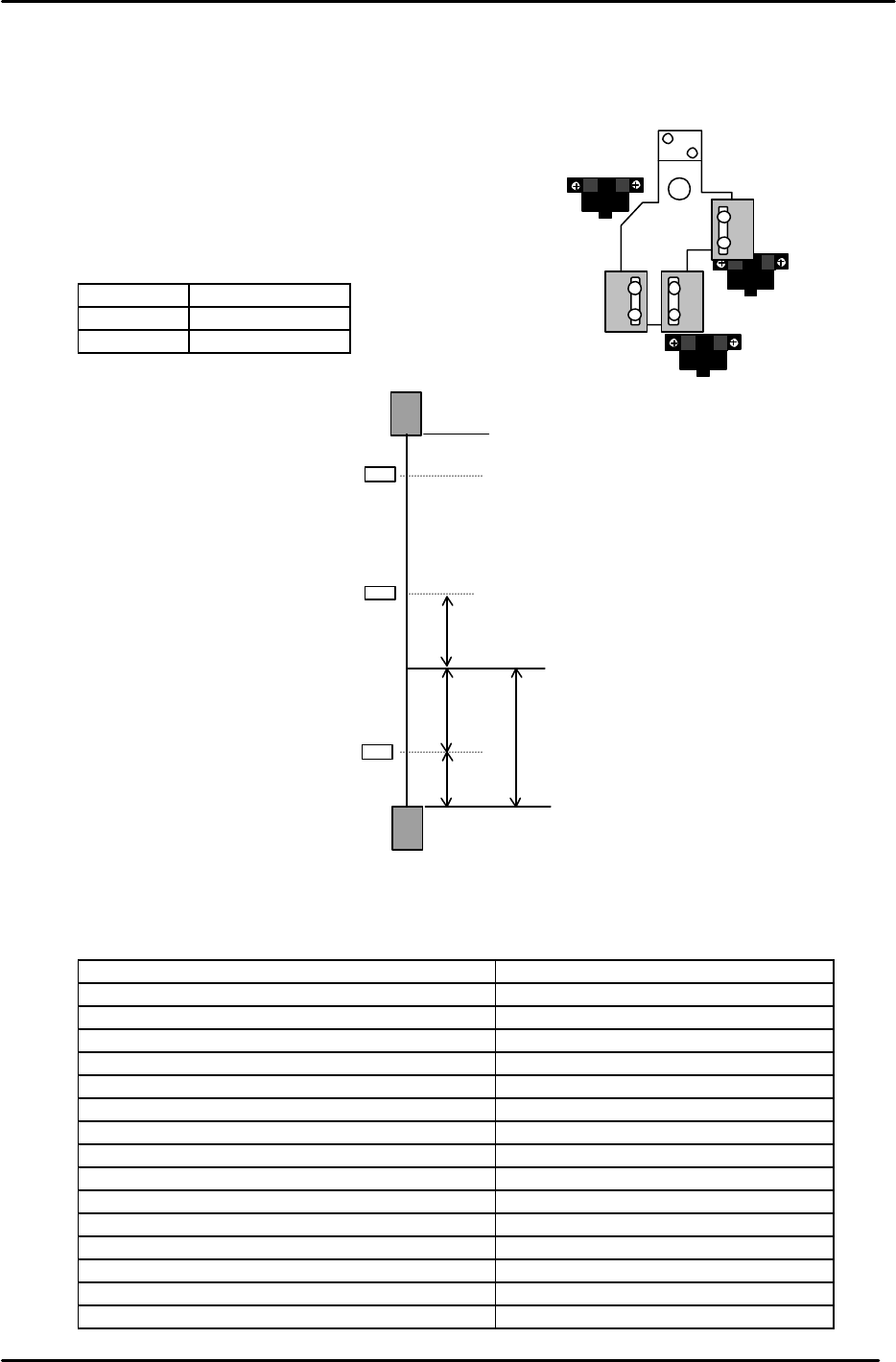
Zero set sensor
+OT sensor
- OT sensor
Figure 19
– OT
+ OT
+ Stopper
– Stopper
Zero Set Sensor
(Min Limit Position)
(Max Limit Position)
500
0 Position
1000
1000
500
Z axis
Figure 19
{ZL (Upper)
+
500 pulses} +/- 50 pulses
Note: ZL upper is calculated in chapter 5.
Set the maximum limit after determining
the ZL upper position.