CP643E.pdf - 第37页
FK-9F98-05 CP-643E Training Text for Service Engineers Edition 5.0 Chapter 3. X, Y, Z and D-axes Adjustment [ 18 /26] Fuji Machine Mfg. Co., Ltd. Okazaki SMT Equipment Quality Assurance Dept. Technical Support Div. Secti…
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 3. X, Y, Z and D-axes Adjustment [17/26]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
3-17
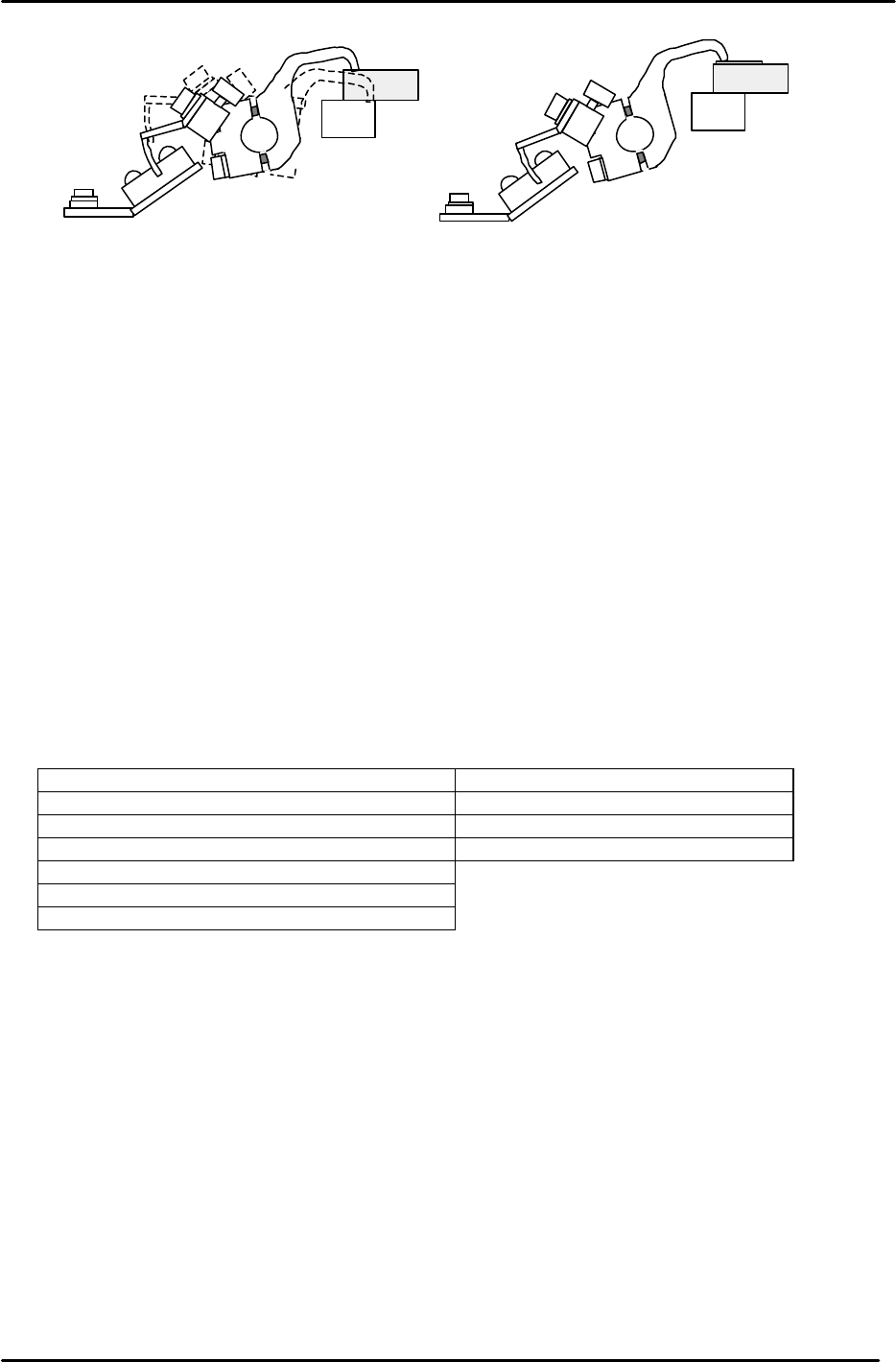
3.13.3 (Part Three) Clamping Cylinder Sensor Adjustment
1. Check that PCBs in the range of 0.5mm to 4.0mm can be clamped smoothly.
2. There are three clamping cylinders and two sensors on each cylinder. On each cylinder, the upper
sensor is the CLAMP CHECK sensor, and the lower sensor is the UNCLAMP CHECK sensor.
3. For the UNCLAMP CHECK sensors, open the rail to its unclamp limit. At this position find the point
where the sensor LED turns ON then move it 0.5mm further toward the ON direction.
4. For the CLAMP CHECK sensors, set the sensor so that it is ON when a 4.0mm board is clamped
and OFF when a 5.0mm board is clamped. Note that the clamping solenoid should be activated but
not locked for this adjustment. I.e. In this case, “clamped” means press the clamping solenoid once
but do not lock it.
5. Finally confirm that the CLAMP CHECK SENSORS are ON when the clamper rail is clamped with
no PCB in place.
6. Check the Clamping Cylinder Sensor and Valve reaction in I/O.
<I/O à Standard I/O à (IN or OUT) >
IN X060 M-LFT CLAMP RF OUT Y050 M-LFT CLAMP F
IN X061 M-LFT CLAMP RR OUT X051 M-LFT UNCLAMP F
IN X062 M-LFT UNCLAMP RF OUT X056 M-LFT CLAMP R
IN X063 M-LFT UCLMP RR OUT X057 M-LFT UNCLAMP R
IN X06C M-LFT CLAMP LF
IN X06D M-LFT UCLMP LF
IN X032 PCB SET CLP OK
Figure 28
4.0mm PCB Clamped
(Sensor LED OFF)
4.5mm PCB Clamped
(Sensor LED ON)
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 3. X, Y, Z and D-axes Adjustment [18/26]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
3-18
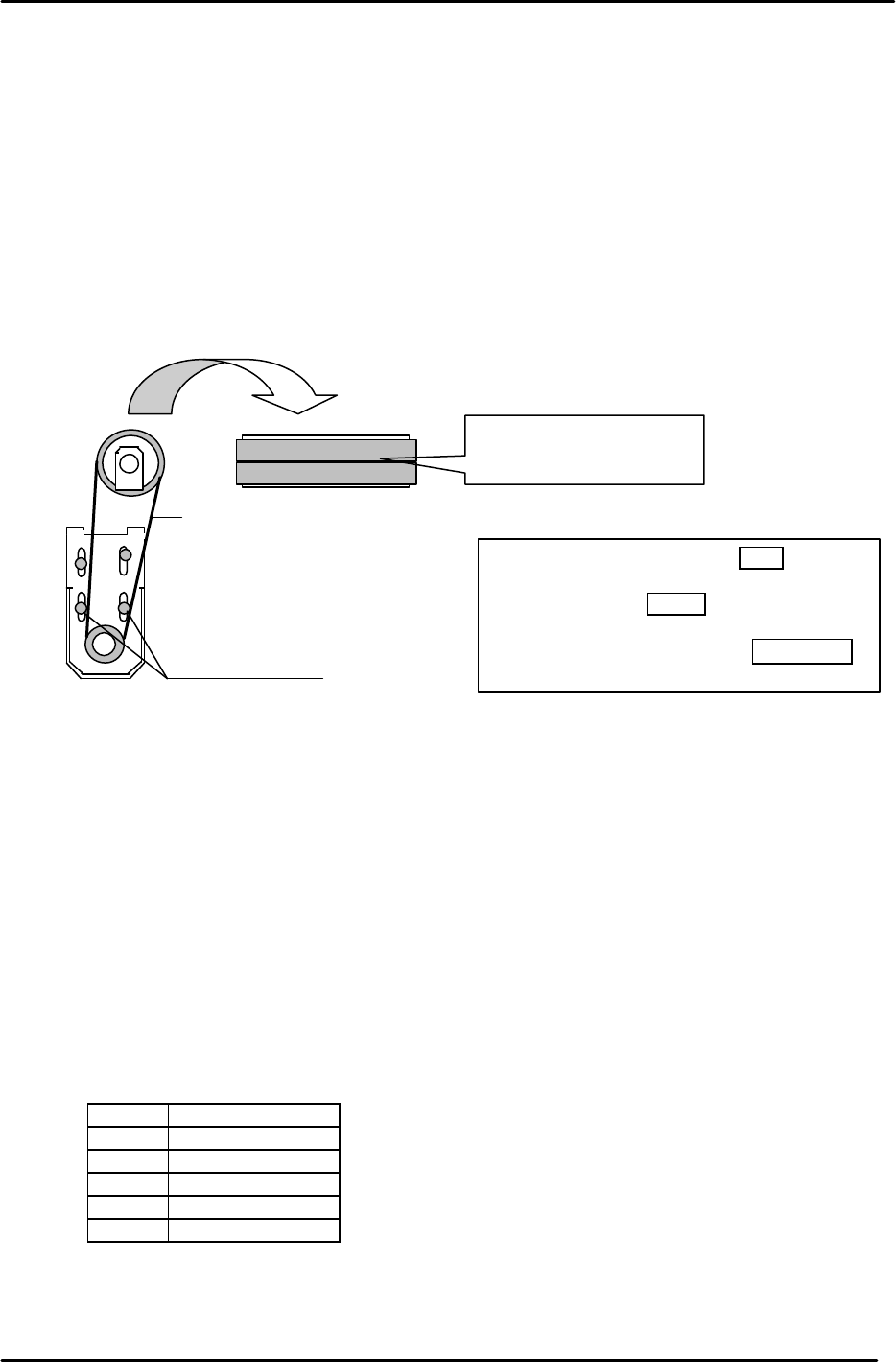
3.14 D-axis Zero Setting (0.00853mm/pulse)
1. Remove the minus OT flags on D1/D2 and the timing belts from the D-axis.
2. In Mecha-check mode, complete zero setting by blocking the zero set sensor with a scale.
3. Set the D1 (2) axis counter value to - 3750 pulses.
4. Place the D1 table against the plus mechanical-stopper, (D2 minus mechanical stopper) and
attach the timing belts. (One tooth on the belt changes the value about 127 pulses)
Tolerance: - 3750±100 pulse
Ensure the markings on the belt are aligned and facing out when attaching.
5. Check that the final servo counter value at the stopper is - 3750 ± 100 pulses.
6. Adjust the OT flags to turn the minus over travel sensors ON at 1407 pulses away from the
mechanical-stoppers.
7. Move the table to the 2500 pulse position. Adjust the flag to turn the D1 (D2) zero set sensor
ON at this position. Make sure the timing belts remain in the center of the pulley when the
device table is jogged.
8. Set the travel limits according to the illustrations in figure 30 (D1) and 31 (D2). Enter the
values to the proper at the host PC.
9. Check the sensor reaction in I/O.
< I/O à ETC à Servo board 3 à IN
SX004 D1 AXIS +OT
SX008 D2 AXIS +OT
SX005 D1 AXIS - OT
SX009 D2 AXIS - OT
SX006 D1 AXIS ZERO
SX00A D2 AXIS ZERO
Torque = 120Nm
.
Timing belts
274 J 012
274 J 013
274 J 014
Numbers in sequence
and facing out.
Figure 29
D1-axis timing belt tension
=
5
2
±
5
D2-axis tension = 49.5±5
D-axis motor bracket torque = 1200kgf.cm
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 3. X, Y, Z and D-axes Adjustment [19/26]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
3-19
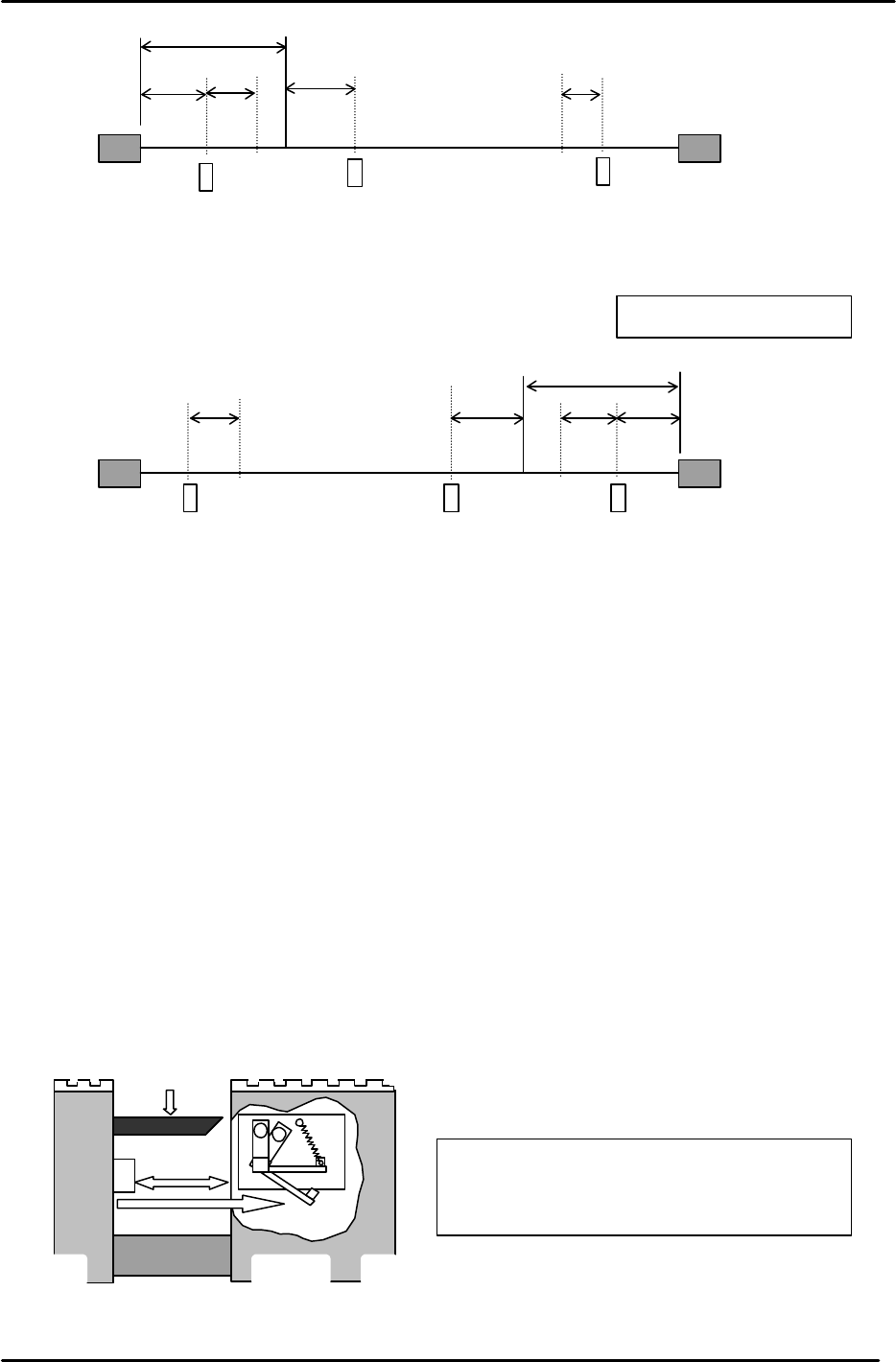
3.15 D-axis Interference Prevention Sensor Adjustment
1. Ensure that the sensor face is parallel to the D-axis ball screw.
2. Set the amplifier volume on the sensor 1 to 1.5 scales from where the beams click. (Middle of Min
and Max.)
3. Zero set the D1 and D2 tables, then move both tables to around the center of the machine.
4. Manually rotate the ball screw so D1 contacts D2. Move D1 2700 pulses (23mm) back from this
position.
5. Adjust the flag so the interference prevention sensor activates when the clearance
between both tables is 2700 pulses. (Tolerance: 2700 +/-25 pulses)
Max Limit Position
Min Limit Position
– OT
+ OT
+ Stopper
– Stopper
Zero Set Sensor
D1- axis
0 Position
2500
3750
117
1407
117
Figure 30
– OT
+ OT
+ Stopper
– Stopper
Zero Set Sensor
Min Limit Position
Max Limit Position
D2- axis
117
0 Position
117
2500
3750
1407
Figure 31
Light beam
Ball screw
2700pulses
Interference
prevention flag
Figure 32
Jog the table to check that the
servo power
is cut when this sensor activates.
(This sensor is the +OT of D1 and D2.)
Views from rear of M/C