CP643E.pdf - 第98页
FK-9F98-05 CP-643E Training Text for Service Engineers Edition 5.0 Chapter 6. Servo Pack Zero Setting and Gain/ Motion Check [ 7 / 14] Fuji Machine Mfg. Co., Ltd. Okazaki SMT Equipment Quality As surance Dept. Technical …
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 6. Servo Pack Zero Setting and Gain/ Motion Check [6/14]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
6
-
6
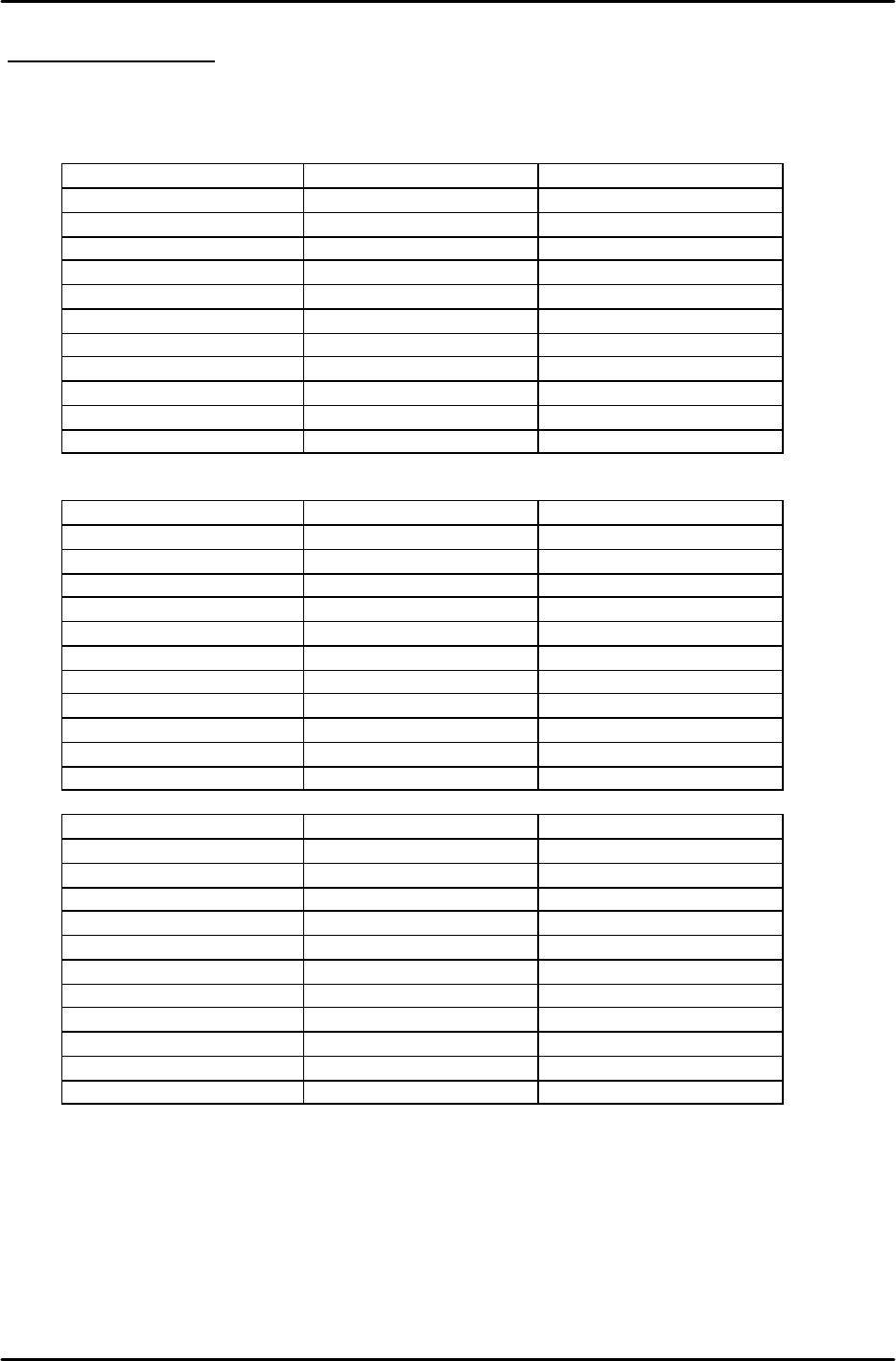
CP643 Parameter List
Listed below are the parameters which will be displayed when the mechanical software, servo
adjustment software, of V1.26 or after is booted by RESET/START.
C-axis
st_pos 0 Speed 136200 kps 100
en_pos 0 Reach 5 kis 1
time 1500 rough 10 kpm 120
pitch 0 accel 69 kim 0
z_high 50 reduce 69 kff 60
z_creep 5 s_par 10 kaa 0
z_reduce 100 lim_pe 0 kpi 120
cam_sp1 1000 limit 0 kii/128 128
cam_sp2 1000 h_speed 100 cam_pos1 340
cycle 1 deflect 10000 cam_pos2 170
da_sign 0 t_out 10000 sign 0
***** 00000 ***** 00000 pulse 0
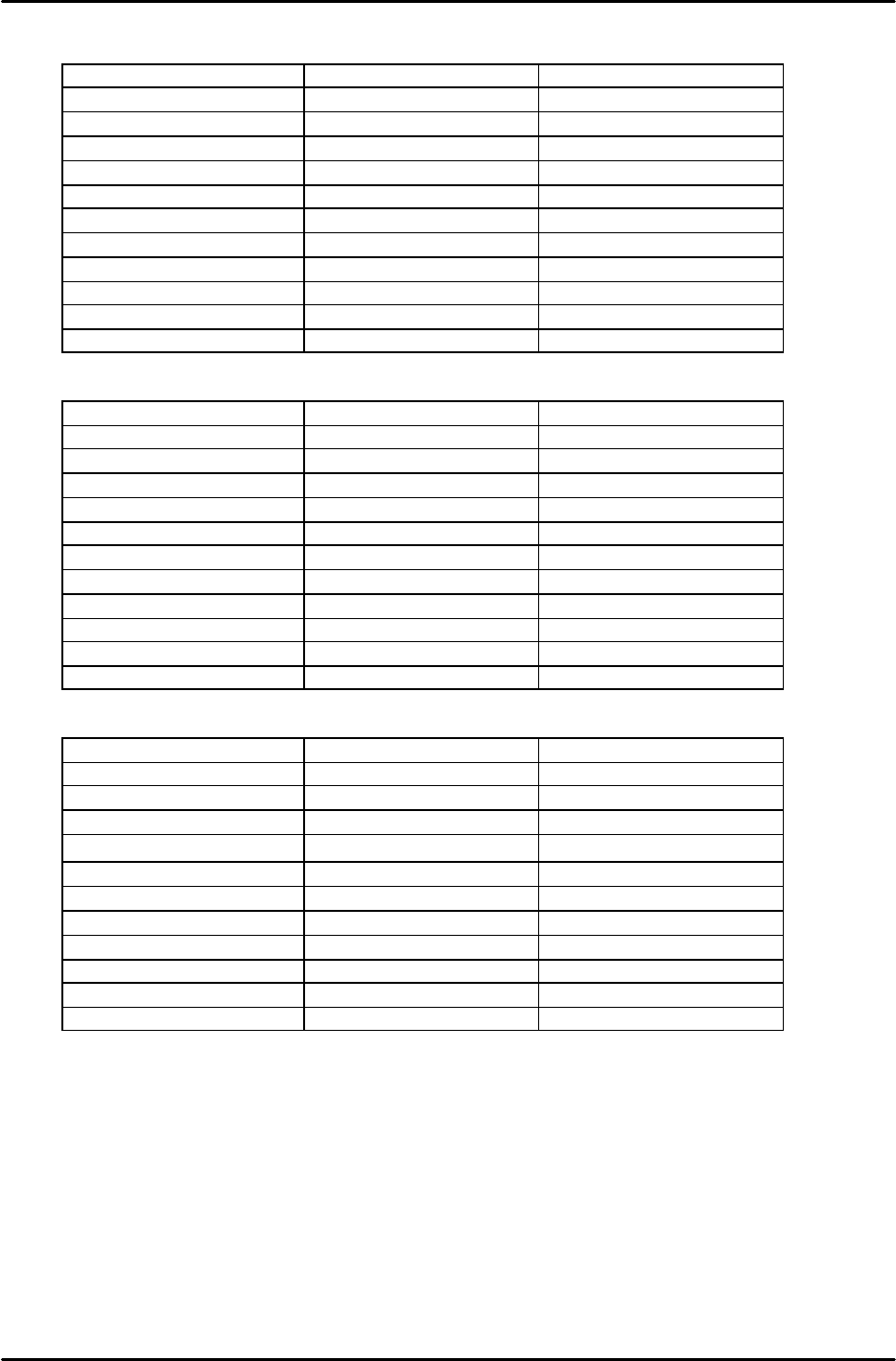
FQ and FRQ axis ROT (Rotation)
st_pos 0 speed 100000 kps 200
en_pos 400 reach 8 kis 1
time 35 rough 10 kpm 220
pitch 0 accel 25 kim 0
z_high 100 reduce 25 kff 35
z_creep 50 s_par 0 kaa 0
z_reduce 500 lim_pe 0 kpi 250
cam_sp1 0 limit 0 kii/128 500
cam_sp2 0 h_speed 100 cam_pos1 0
cycle 0 deflect 10000 cam_pos2 0
da_sign 0 t_out 10000 sign 0
***** 00000 ***** 00000 pulse 0
X-axis UHi
st_pos 0 speed 100000 kps 130
en_pos 1530 reach 5 kis 2
time 35 rough 10 kpm 160
pitch 0 accel 36 kim 0
z_high 100 reduce 36 kff 10
z_creep 5 s_par 15 kaa 0
z_reduce 500 lim_pe 0 kpi 160
cam_sp1 0 limit 0 kii/128 250
cam_sp2 0 h_speed 100 cam_pos1 0
cycle 0 deflect 10000 cam_pos2 0
da_sign 0 t_out 100 sign 0
***** 00000 ***** 00000 pulse 0
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 6. Servo Pack Zero Setting and Gain/ Motion Check [7/14]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
6
-
7
Y-axis UHi
st_pos 0 speed 100000 kps 120
en_pos 1530 reach 5 kis 2
time 35 rough 10 kpm 140
pitch 0 accel 36 kim 0
z_high 100 reduce 36 kff 30
z_creep 5 s_par 15 kaa 0
z_reduce 500 lim_pe 0 kpi 140
cam_sp1 0 limit 0 kii/128 500
cam_sp2 0 h_speed 100 cam_pos1 0
cycle 0 deflect 10000 cam_pos2 0
da_sign 0 t_out 100 sign 0
***** 00000 ***** 00000 pulse 0
Z-axis
st_pos 0 speed 62500 kps 100
en_pos 500 reach 50 kis 1
time 35 rough 100 kpm 120
pitch 0 accel 55 kim 0
z_high 100 reduce 55 kff 30
z_creep 5 s_par 15 kaa 0
z_reduce 200 lim_pe 0 kpi 120
cam_sp1 0 limit 0 kii/128 128
cam_sp2 0 h_speed 100 cam_pos1 0
cycle 0 deflect 10000 cam_pos2 0
da_sign 0 t_out 100 sign 0
***** 00000 ***** 00000 pulse 0
D-axis
st_pos 0 speed 78125 kps 80
en_pos 1950 reach 15 kis 1
time 35 rough 20 kpm 140
pitch 0 accel 42 kim 0
z_high 150 reduce 42 kff 50
z_creep 10 s_par 10 kaa 0
z_reduce 1000 lim_pe 0 kpi 140
cam_sp1 0 limit 0 kii/128 128
cam_sp2 0 h_speed 100 cam_pos1 0
cycle 0 deflect 10000 cam_pos2 0
da_sign 0 t_out 100 sign 0
***** 00000 ***** 00000 pulse 0
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 6. Servo Pack Zero Setting and Gain/ Motion Check [8/14]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
6
-
8
NC-axis ROT (Rotation)
st_pos 0 speed 45000 kps 100
en_pos 300 reach 10 kis 5
time 35 rough 20 kpm 200
pitch 0 accel 6 kim 0
z_high 50 reduce 10 kff 70
z_creep 10 s_par 10 kaa 0
z_reduce 100 lim_pe 0 kpi 200
cam_sp1 0 limit 0 kii/128 128
cam_sp2 0 h_speed 100 cam_pos1 0
cycle 0 deflect 10000 cam_pos2 0
da_sign 0 t_out 10000 sign 0
***** 00000 ***** 00000 pulse 0
X-axis Mid
st_pos 0 speed 100000 kps 130
en_pos 600 reach 5 kis 2
time 35 rough 10 kpm 160
pitch 0 accel 75 kim 0
z_high 100 reduce 75 kff 35
z_creep 5 s_par 15 kaa 0
z_reduce 500 lim_pe 0 kpi 160
cam_sp1 0 limit 0 kii/128 300
cam_sp2 0 h_speed 100 cam_pos1 0
cycle 0 deflect 10000 cam_pos2 0
da_sign 0 t_out 100 sign 0
***** 00000 ***** 00000 pulse 0
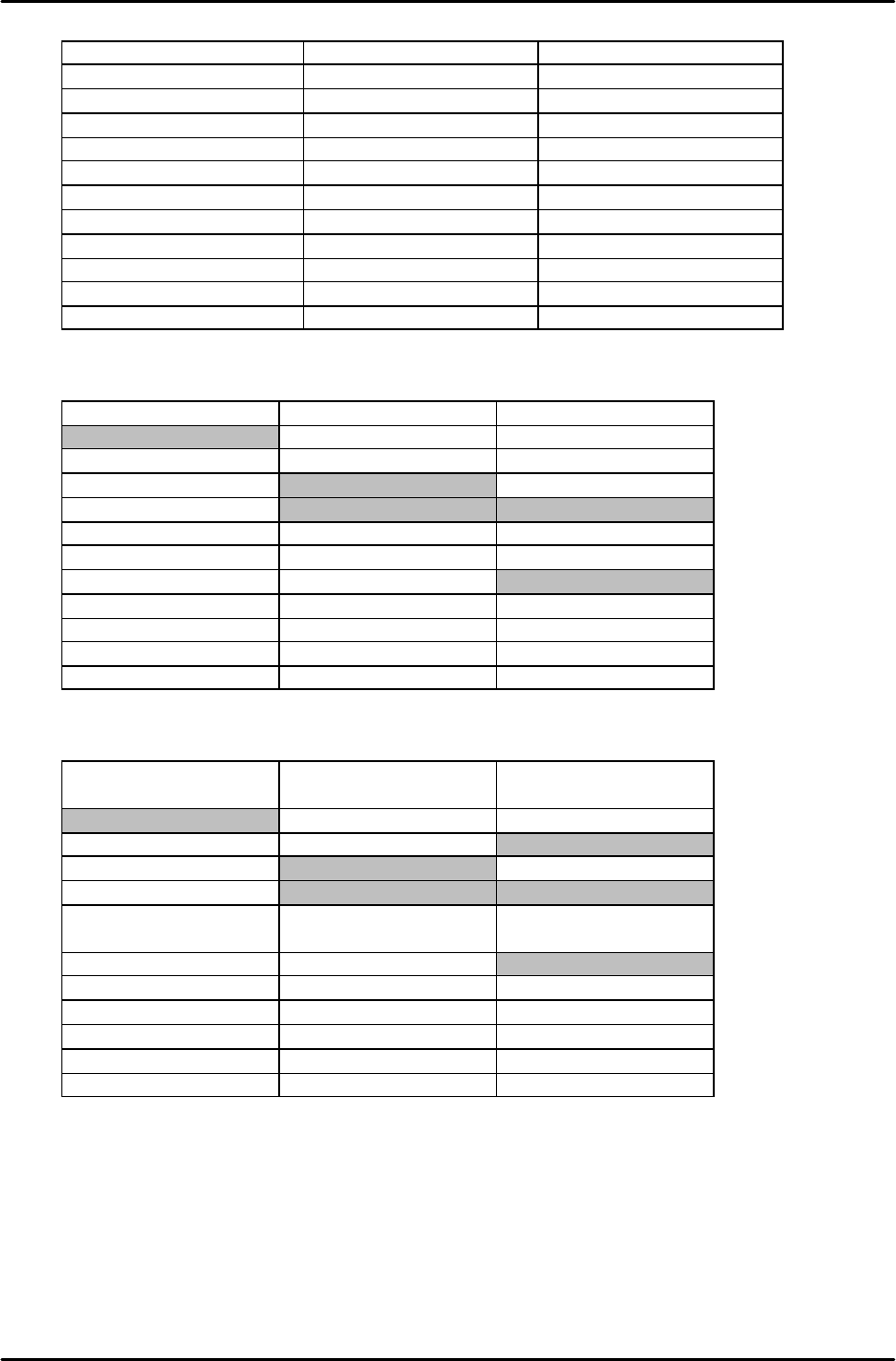
Y-axis Mid
st_pos
0
speed 100000 kps 120
en_pos 600 reach 5 kis 2
time 35 rough 10 kpm 145
pitch 0 accel 75 kim 0
z_high 100 Reduce 75 kff 40
z_creep
5
s_par 15 kaa 0
z_reduce 500 lim_pe 0 kpi 145
cam_sp1 0 limit 0 kii/128 500
cam_sp2 0 h_speed 100 cam_pos1 0
cycle 0 deflect 10000 cam_pos2 0
da_sign 0 t_out 100 sign 0
***** 00000 ***** 00000 pulse 0
Change the bold values as indicated to test the Mid range.