CP643E.pdf - 第96页
FK-9F98-05 CP-643E Training Text for Service Engineers Edition 5.0 Chapter 6. Servo Pack Zero Setting and Gain/ Motion Check [ 5 / 14] Fuji Machine Mfg. Co., Ltd. Okazaki SMT Equipment Quality As surance Dept. Technical …
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 6. Servo Pack Zero Setting and Gain/ Motion Check [4/14]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
6
-
4
6.7 C and X axes Gain / Motion Check
1. Using the digital operator, ensure the servo pack parameters match the parameter table.
2. Select the axis ? [SERVO MOVE] ? [SERVO ON] ? [START] to zero set.
3. Press ? [MOVE MODE] ? “Test move mode” ? [MODE] ? [GAIN TEST ] ? [START]
The following items will be displayed on the monitor:
* Movement time in milliseconds.
* Maximum over shoot amount in pulses.
4. Check that the movement time and overshoot are within the ranges specified in chart 1.
6.8 Y, Z, FQ, FRQ, and NC axes Gain / Motion Check
1. Using the digital operator, ensure the servo pack parameters match the parameter table.
2. Select the axis ? [SERVO MOVE] ? [SERVO ON] ? [START] to zero set.
3. Press ? [MOVE MODE] ? “Test move mode” ? [MODE] ? [GAIN TEST ] ? [START]
The following items will be displayed on the monitor:
* Movement time in milliseconds.
* Maximum over shoot amount in pulses.
4. Check that the movement time and overshoot are within the ranges specified in chart 1.
Notes:
Check the X and Y axis using the “UHi” and “Mid” parameters. Ensure that “moving time”
and the “maximum over shoot amount” is the same as listed in chart 1. Ensure that both
“UHi” and “Mid” fall within the ranges specified in chart 1.
Check FQ, FRQ, and NC axes using the “ROT” and “REV” parameters. Ensure that “moving
time” and “maximum over shoot amount” are the same as listed in chart 1. Ensure that both
“ROT” and “REV” fall within the ranges specified in chart 1.
Set the cam angle to 0 degrees with regard to the ROT for the FQ-axis. Turn the FQ valve
ON.
Y030 FQ SOL ON ?
Y031 FQ SOL OFF ×
Set the cam angle to 200 degrees. Engage the clutch. Adjust while the shaft deflection amount
is 0.30mm.
Set the cam angle to 0 degrees with regard to the ROT for the NC-axis. Remove the NC
stopper by I/O.
Y02A NOZ SOL ON ?
Y02B NOZ SOL OFF ×
Set the cam angle to 200 degrees. Engage the nozzle change-clutch to make it possible to
change nozzles. Then adjust.
No need to adjust the servo when it comes to the axis using a digital operator.
When it is difficult to achieve the values in chart 1, check again after idling.
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 6. Servo Pack Zero Setting and Gain/ Motion Check [5/14]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
6
-
5
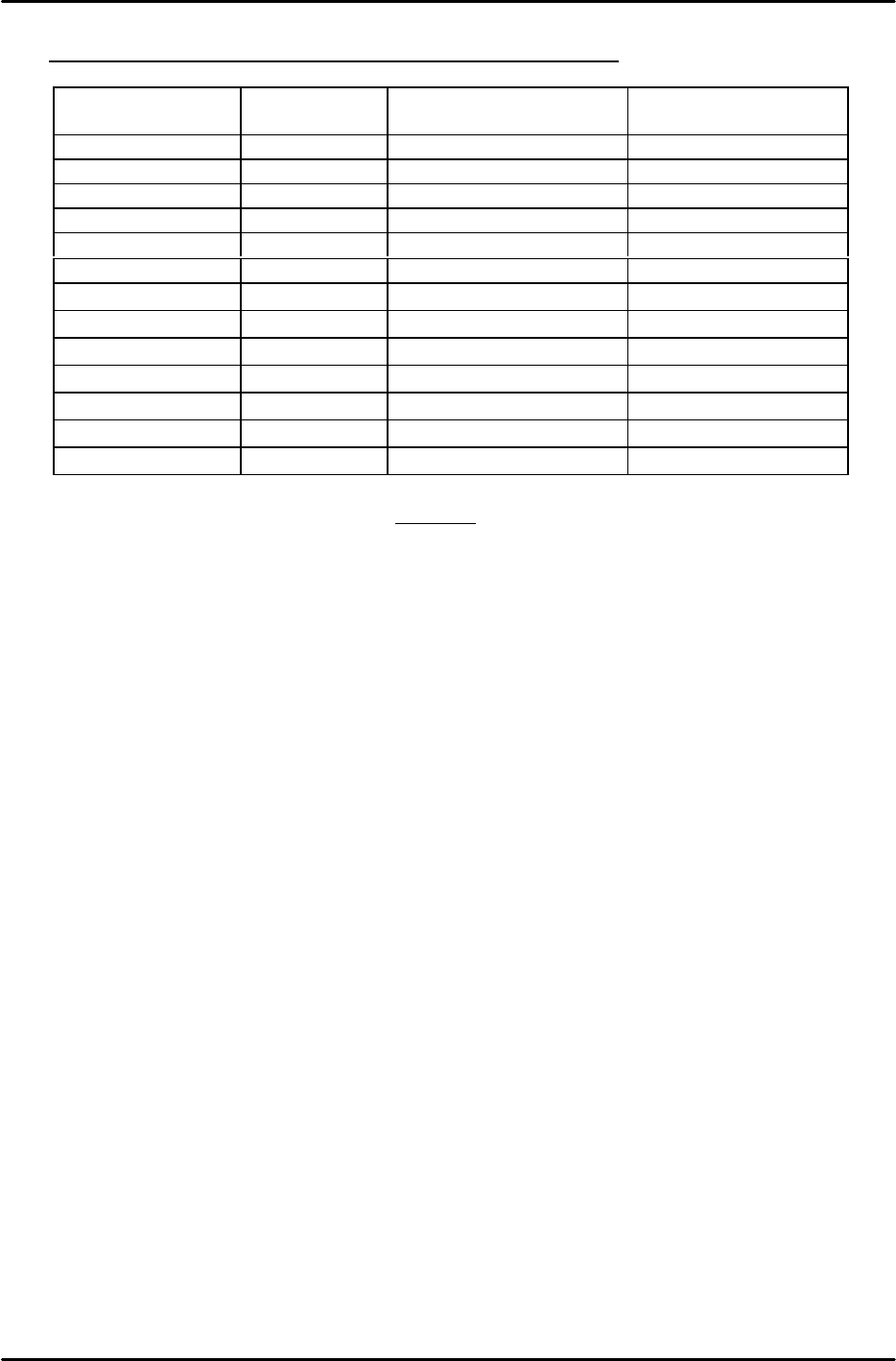
“Moving time” and “Maximum over shoot amount” for each axis.
Axis Condition Moving time Maximum over shoot
(ms) amount (pulse)
X UHi 56~59 0~4
X Mid 56~59 0~4
Y UHi 56~59 0~4
Y Mid 56~59 0~4
Z 52~54 0~5
C 166~171 0~4
D Empty table 72~73 2~4
F ? ROT 200 degrees 29~35 0~4
F ? REV 0 degree 26~32 0~4
FR? ROT 200 degrees 29~35 0~4
FR? REV 0 degree 26~32 0~4
NC ROT 200 degrees 19~22 0~5
NC REV 0 degree 30~34 0~4
CHART 1
FK-9F98-05 CP-643E Training Text for Service Engineers
Edition 5.0 Chapter 6. Servo Pack Zero Setting and Gain/ Motion Check [6/14]
Fuji Machine Mfg. Co., Ltd. Okazaki
SMT Equipment Quality Assurance Dept.
Technical Support Div. Section No.2
6
-
6
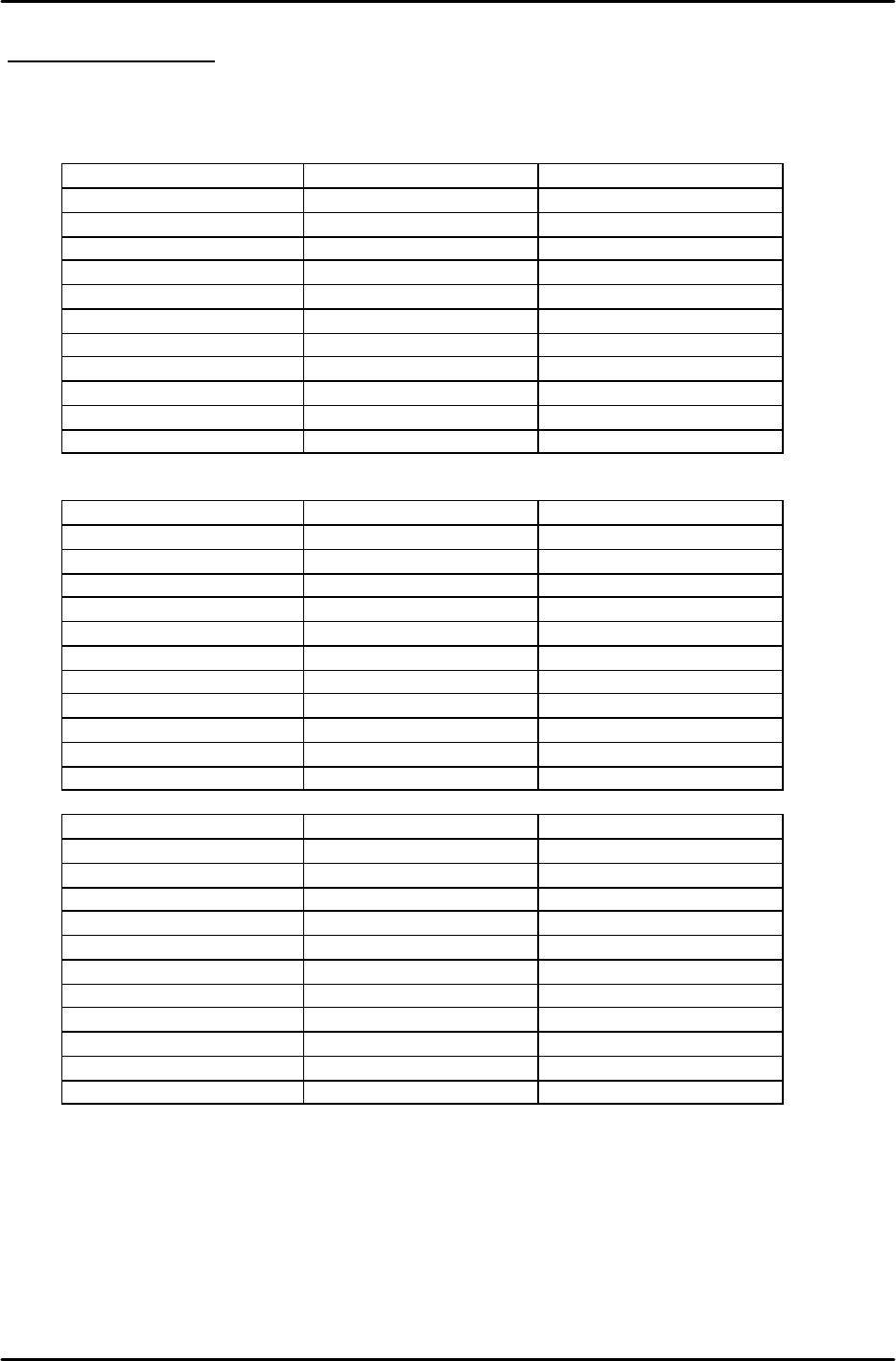
CP643 Parameter List
Listed below are the parameters which will be displayed when the mechanical software, servo
adjustment software, of V1.26 or after is booted by RESET/START.
C-axis
st_pos 0 Speed 136200 kps 100
en_pos 0 Reach 5 kis 1
time 1500 rough 10 kpm 120
pitch 0 accel 69 kim 0
z_high 50 reduce 69 kff 60
z_creep 5 s_par 10 kaa 0
z_reduce 100 lim_pe 0 kpi 120
cam_sp1 1000 limit 0 kii/128 128
cam_sp2 1000 h_speed 100 cam_pos1 340
cycle 1 deflect 10000 cam_pos2 170
da_sign 0 t_out 10000 sign 0
***** 00000 ***** 00000 pulse 0
FQ and FRQ axis ROT (Rotation)
st_pos 0 speed 100000 kps 200
en_pos 400 reach 8 kis 1
time 35 rough 10 kpm 220
pitch 0 accel 25 kim 0
z_high 100 reduce 25 kff 35
z_creep 50 s_par 0 kaa 0
z_reduce 500 lim_pe 0 kpi 250
cam_sp1 0 limit 0 kii/128 500
cam_sp2 0 h_speed 100 cam_pos1 0
cycle 0 deflect 10000 cam_pos2 0
da_sign 0 t_out 10000 sign 0
***** 00000 ***** 00000 pulse 0
X-axis UHi
st_pos 0 speed 100000 kps 130
en_pos 1530 reach 5 kis 2
time 35 rough 10 kpm 160
pitch 0 accel 36 kim 0
z_high 100 reduce 36 kff 10
z_creep 5 s_par 15 kaa 0
z_reduce 500 lim_pe 0 kpi 160
cam_sp1 0 limit 0 kii/128 250
cam_sp2 0 h_speed 100 cam_pos1 0
cycle 0 deflect 10000 cam_pos2 0
da_sign 0 t_out 100 sign 0
***** 00000 ***** 00000 pulse 0