KE-2050R-2055R-2060R维修调整要领书.pdf - 第227页
R E V 1 . 0 0 维修调整要领书 JHRMB 可以根据基板设定 DIPSW(SW1)。 ZT 驱动器基板 (Zθ1∼4:MNLA 轴用 )DIP SW 的设定 ICZT 驱动器 (IC Zθ:FMLA 轴用 )DIP SW 的设定 14-6-2. LED 显示 在 Z/θ 驱动器基板的正面面板上部安装了 4 个 LED。 此 LED 表示各轴的状态 。 各轴和 LED 的对应如下 所示 。 Z 1 Z 2 Z 3 1 Z 1 …
REV1.00
维修调整要领书
14-6.Z/θ装置
Z/θ装置由驱动贴装头的Zθ軸的AC伺服驱动器构成。
14-6-1.Z/θ装置的构成
Zθ用AC伺服驱动器用1个驱动器可以驱动4个轴。
因此,KE−2050/2050R/2055R使用 2 个,KE−2060/2060R使用 3 个驱动器。
KE−2050/2050R/2055R的空插口上安装有空白面板。
另外,作为后备用的5相步进驱动器,HX004200000(EN用为HX005450000)安装在同一机架上。
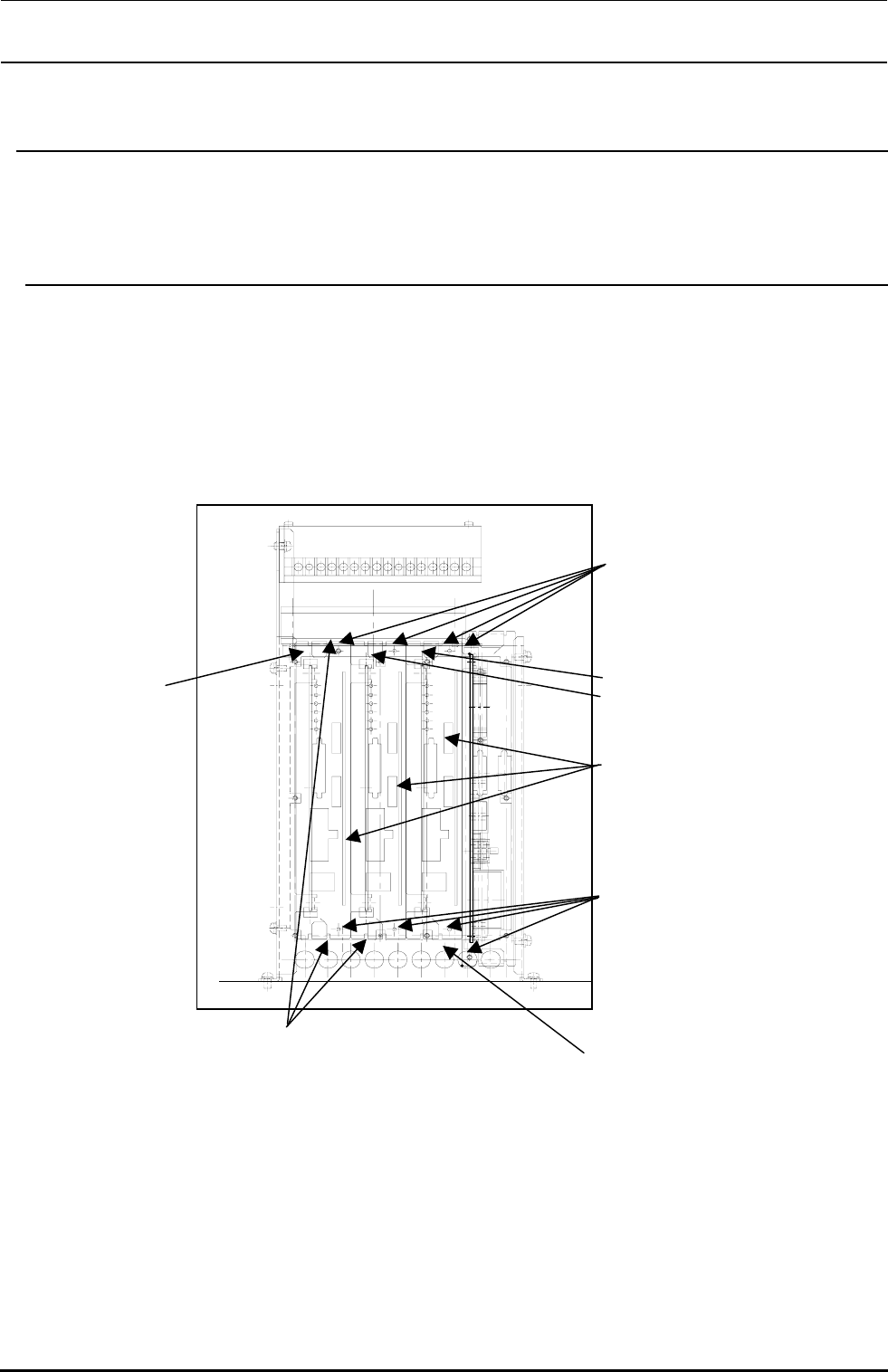
各马达和驱动器的关系如图14−6−1−1所示。
面板螺丝(40000431)
「Z1
」
标签
「Z3」标签
「Z2」标签
JHRMB(40003261)
面板螺丝(40000431)
IC ZT驱动器(40003286):KE-2060/2060R
ZT 空白面板(40000462):KE-2050/2050R/2055R
ZT驱动器(40003258)
[驱动器 2 个、风扇 1 个一套]
图 14-6-1-1 Z/θ装置的构成图
14-34
REV1.00
维修调整要领书
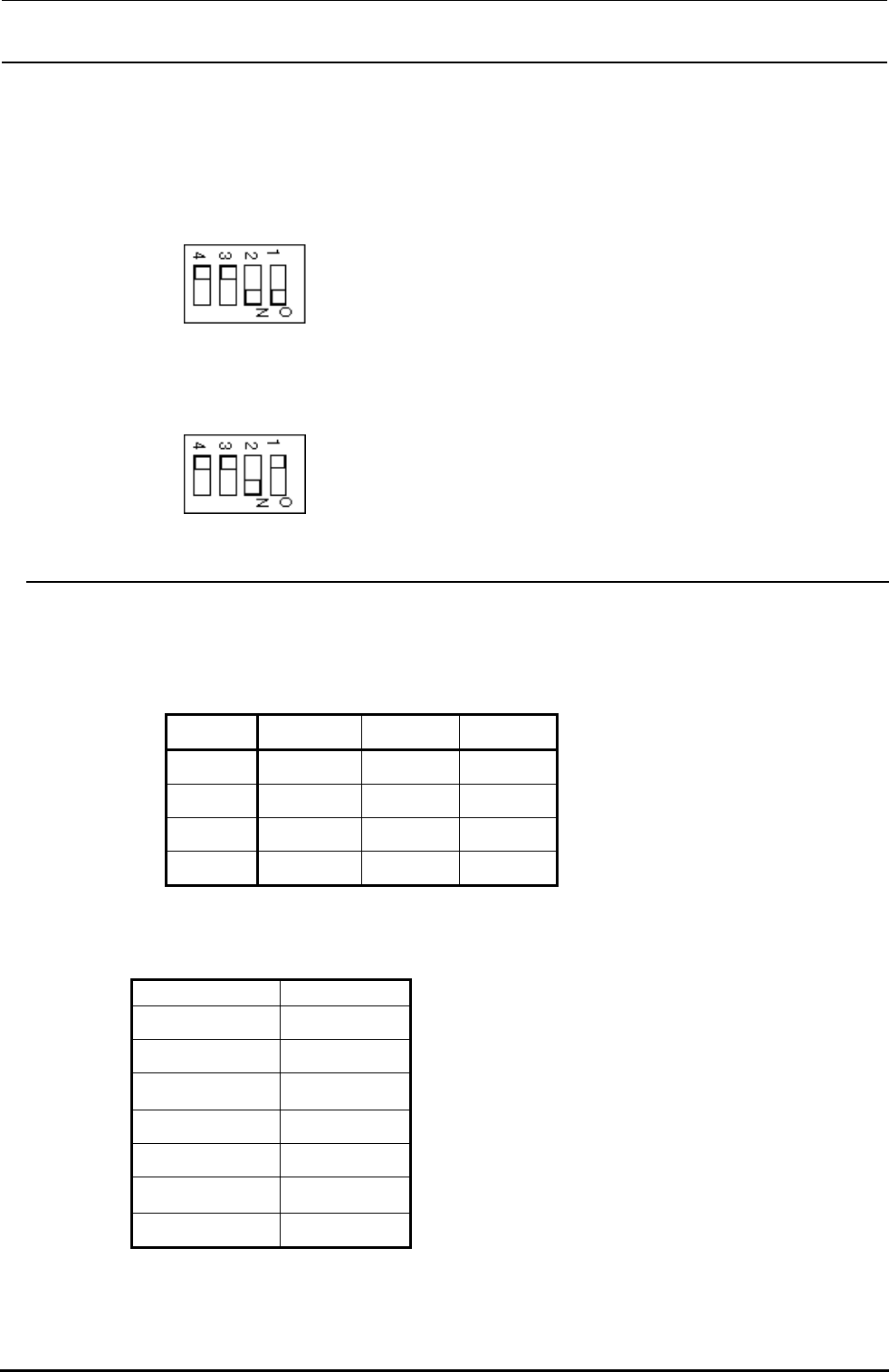
JHRMB 可以根据基板设定 DIPSW(SW1)。
ZT 驱动器基板(Zθ1∼4:MNLA 轴用)DIP SW 的设定
ICZT 驱动器(IC Zθ:FMLA 轴用)DIP SW 的设定
14-6-2.LED 显示
在 Z/θ驱动器基板的正面面板上部安装了 4 个 LED。此 LED 表示各轴的状态。各轴和 LED 的对应如下
所示。
Z1 Z2 Z3
1 Z1 Z3 Z5
2 θ1 θ3 θ5
3 Z2 Z4 −
4 θ2 θ4 −
・绿:伺服锁定
・橘黄:伺服锁定 OFF
・红:警报
警报时,、用各轴的 LED 闪亮次数表示报警种类。
闪亮次数
超电流 1
超负荷 2
超电压异常 3
驱动电源切断 4
过热 5
编码器异常 6
变换器异常 7
14-35
REV1.00
维修调整要领书
14-7.传送装置
14-7-1.传送装置的构成
传送装置的构成图如图14−7−1−1所示。
在底座上的中央安装 CARRY 基板,右侧安装传送步进驱动器,底座内的前左侧安装后备用步进驱动器。
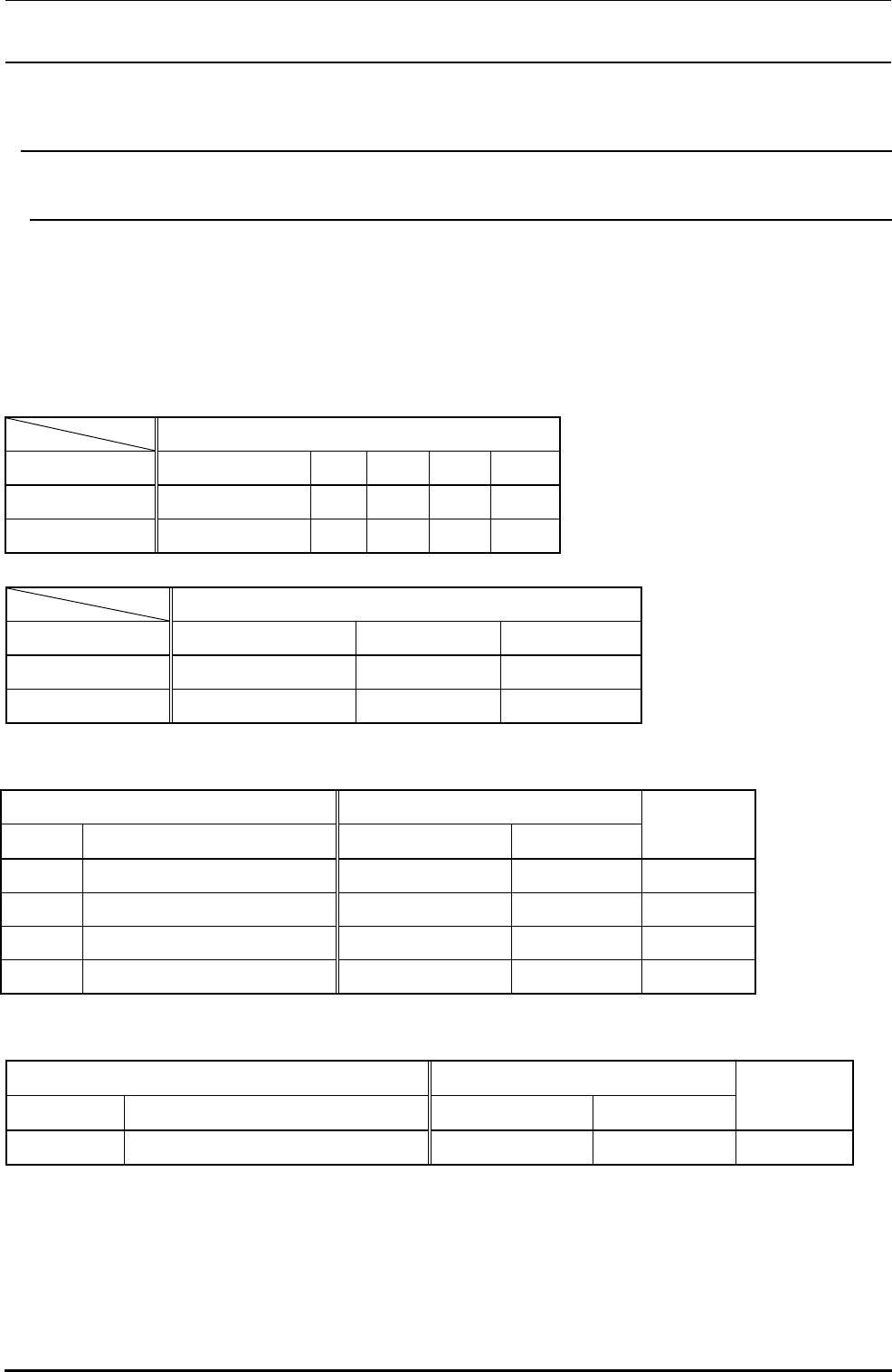
传送装置内的 IN 马达、OUT 马达、IN 传感器、OUT 传感器、WAIT 传感器根据基准和传送方向变化连接部
位。此表如表14−7−1−1所示。请按照此表进行连接。
表14−7−1−1
连接部位
对象电缆货号 连接部基板 FL FR RL RR
40002084 CARRY基板 CN2 CN38 CN38 CN2
40002083 CARRY基板 CN3 CN39 CN39 CN3
FL:前基准,传送方向 L→R
FR:前基准,传送方向 R→L
RL:后基准,传送方向 L→R
RR:后基准,传送方向 R→L
另外,与马达侧的连接如下所示。
连接马达
对象电缆货号 货 号 品 名 中转插头号码
40002084 E9456729MA0 OUT马达组件 CN672
40002083 E9454729MA0 IN马达组件 CN671
下表显示的束线组,EN规格时是被追加/消除的零件。
请根据表中的指示进行连接。
对象电缆 连接部位
货 号 品 名 连接部位名 插头号码
追加/消除
40002241 BU LOCK SENS ASM −−−−− CN446 追加
40002242 BU LOCK CABLE ASM CARRY传感器中转(L) CN405L 追加
40002281 BU LOCK RLY CABLE ASM(EN) CARRY 基板 CN644 追加
40002340 SHORT WIRE ASM CARRY 基板 CN644 消除
下表显示的束线组,COPLA选购品时是被追加的零件。
请根据表中的指示进行连接。
对象电缆 连接部位
货 号 品 名 连接部位名 插头号码
追加/消除
40002289 COPLA I/F CABLE ASM CARRY 基板 CN604/619 追加
14-36