KE-2050R-2055R-2060R维修调整要领书.pdf - 第59页
Rev1.00 维修调整要领书 6) 按照以下的程序进行皮带张力的确认 和调整。 <程序> ① 拧松安装螺丝,调整张力调整螺丝, 同时调整同步皮带T的张力, 并用张 力计测定张力。 张力计设定值 Weight: 0.9 g/m Width : 4 mm Span : 73 mm ② 适当张力: 请确认是否是8±1N。 ③ 张力调整后,请拧下调整螺丝。 ※请往θ马达安装螺丝(4个)上涂锁定漆242,然后用紧固转矩 2.3Nm 来拧紧固定…
Rev1.00
维修调整要领书
2-2-2.θ马达(MNLA贴装头)
更换马达之后,需要重新输入有关轴原点的MS参数。
(输入项目请参照2-9项。)
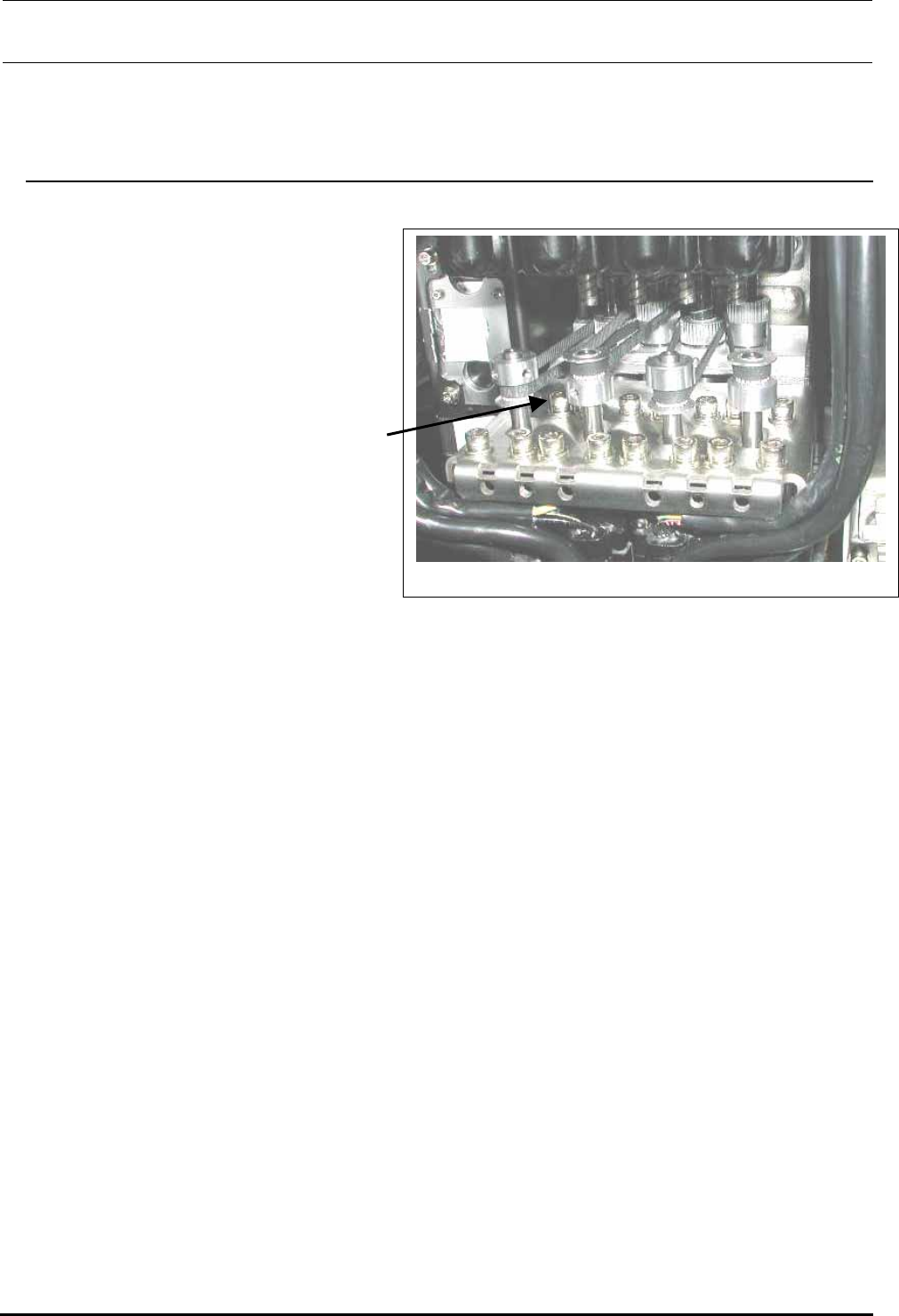
1) 实施2-1-1项的1)~3),把②③向
左侧放倒。
2)实施2-2-1项的2),卸下马达护罩⑩。
3) 卸下θ马达的安装螺丝(4个),移动、
θ马达,松开皮带。
4) 拧松θ马达皮带轮的固定螺丝2个,向
上拉θ马达皮带轮,卸下θ马达。
图2−2−3
5) 请按照相反的顺序组装。
2−7
Rev1.00
维修调整要领书
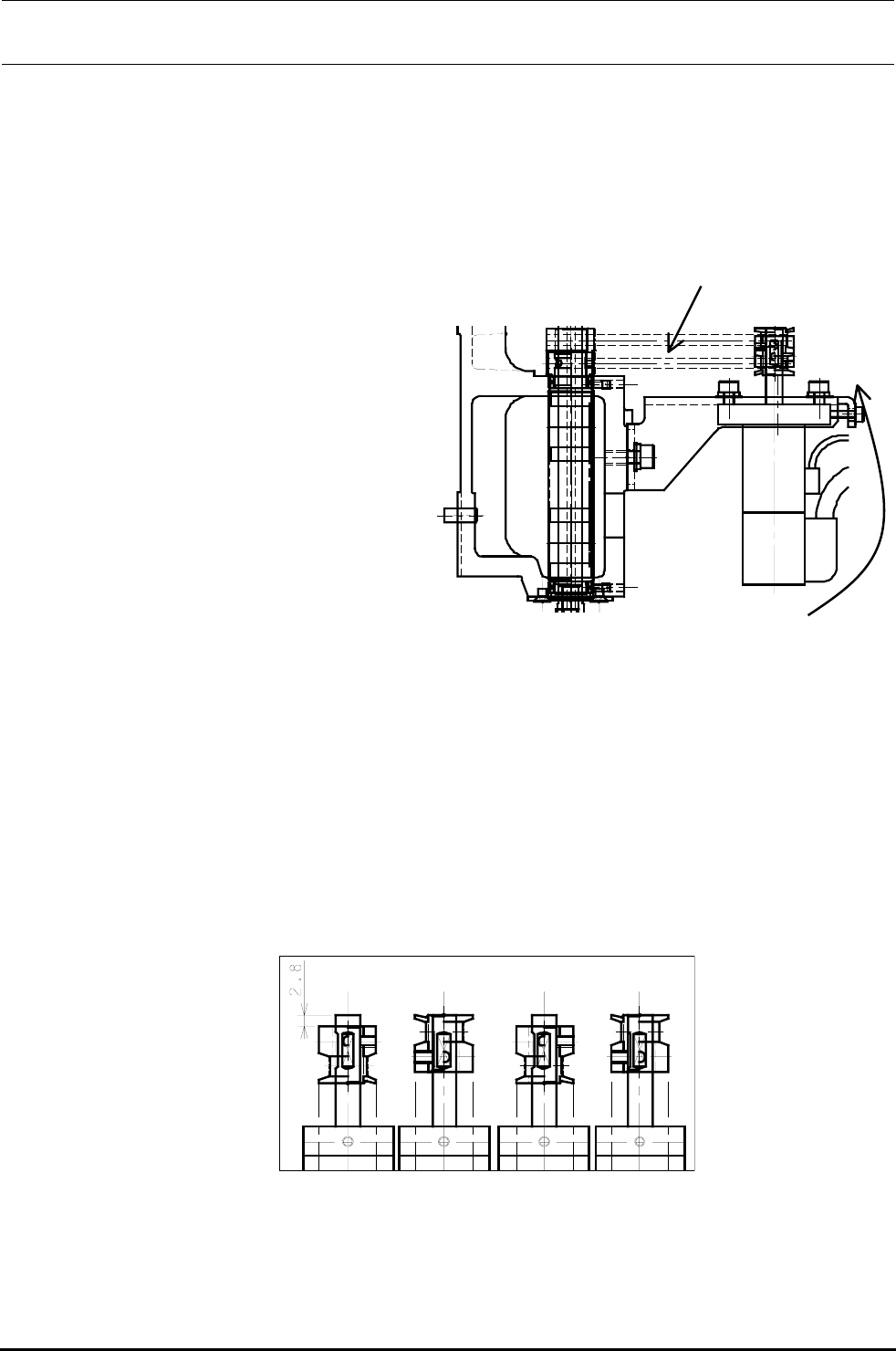
6) 按照以下的程序进行皮带张力的确认
和调整。
<程序>
① 拧松安装螺丝,调整张力调整螺丝,
同时调整同步皮带T的张力,并用张
力计测定张力。
张力计设定值
Weight: 0.9 g/m
Width : 4 mm
Span : 73 mm
② 适当张力: 请确认是否是8±1N。
③ 张力调整后,请拧下调整螺丝。
※请往θ马达安装螺丝(4个)上涂锁定漆242,然后用紧固转矩 2.3Nm 来拧紧固定。
同步皮带T
张力调整螺丝
※ 固定θ马达皮带轮的固定螺丝时,请注意θ马达轴的平部和皮带轮固定螺丝的方向,如图所示
进行固定。固定转矩为 0.5Nm。
L1 L2 L3 L4
图2−2−4
2−8
Rev1.00
维修调整要领书
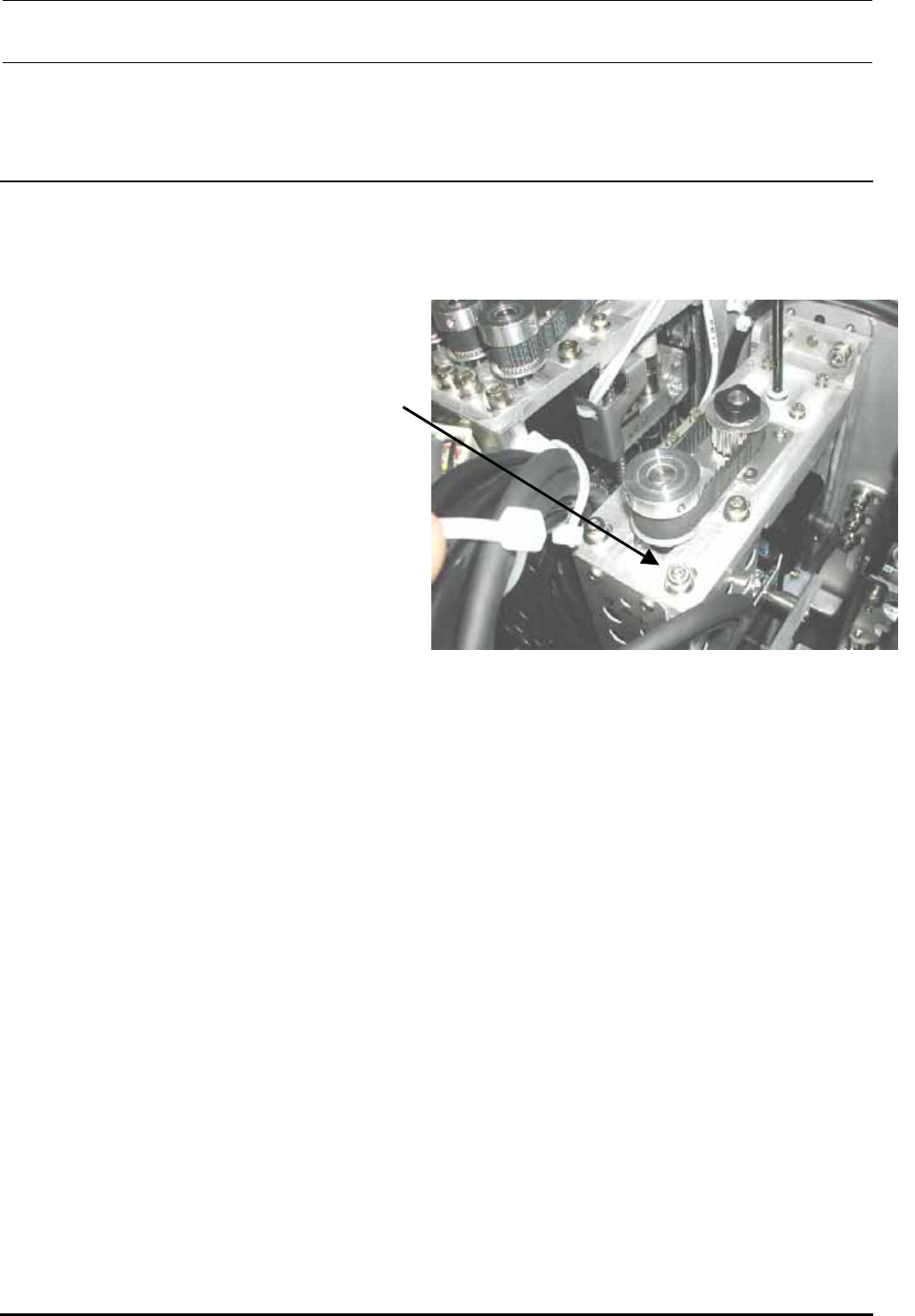
2-2-3.ICZ马达(FMLA贴装头)
更换了ICZ马达之后,需要进行Z轴原点的位置调整,Z 轴的高度以及激光的MS参数输入。(输
入项目请参照2-9项。)
1) 实施2-1-1项的1)~3),把②③向左侧
放倒。
2)卸下IC Z 马达的安装螺丝(4个),移动
马达,松开皮带。
3)剪断马达的电缆固定束线带。
4)拧松皮带轮固定螺丝 2 个,拔出 I C Z 马达
皮带轮,卸下IC Z 马达。
5)安装时,请按照相反的顺序进行。
然后按照以下的程序确认调整皮带张力。
图2−2−5
2−9