NXT机械手册.pdf - 第537页
9. 测定和调整 QD145-11 514 NXT II 机械手册 9.3.1 远程调整方法 使用附加软件调整传感器的灵敏 度。 用此方法 1 次就可以调整在模组上所有的搬运轨道传感 器。 1. 启动附加软件,请从 「前台显示屏」中选择对象的机 器的名称。显示出注册画面。 2. 请直接输入用户 ID 或者从指定的选择框中指定。 3. 请正确地输入密码后单击 「注册」 。 4. 选择进行调整传感器的模组后单击 「远程操作」 。 5. 请选…
QD145-11 9. 测定和调整
NXT II 机械手册 513
9.3 搬运轨道电路板通过传感器的灵敏度调整
搬运轨道电路板传感器是透过式传感器,可以自动地进行灵敏度的调节以便在即使改变搬运
轨道宽度时也可以正确地进行检测。在发生故障时取出电路板等、用手动改变搬运轨道宽度
时,传感器自动调节灵敏度功能被解除并显示错误信息。此时,请按以下中的某一种方法恢
复自动调节灵敏度。
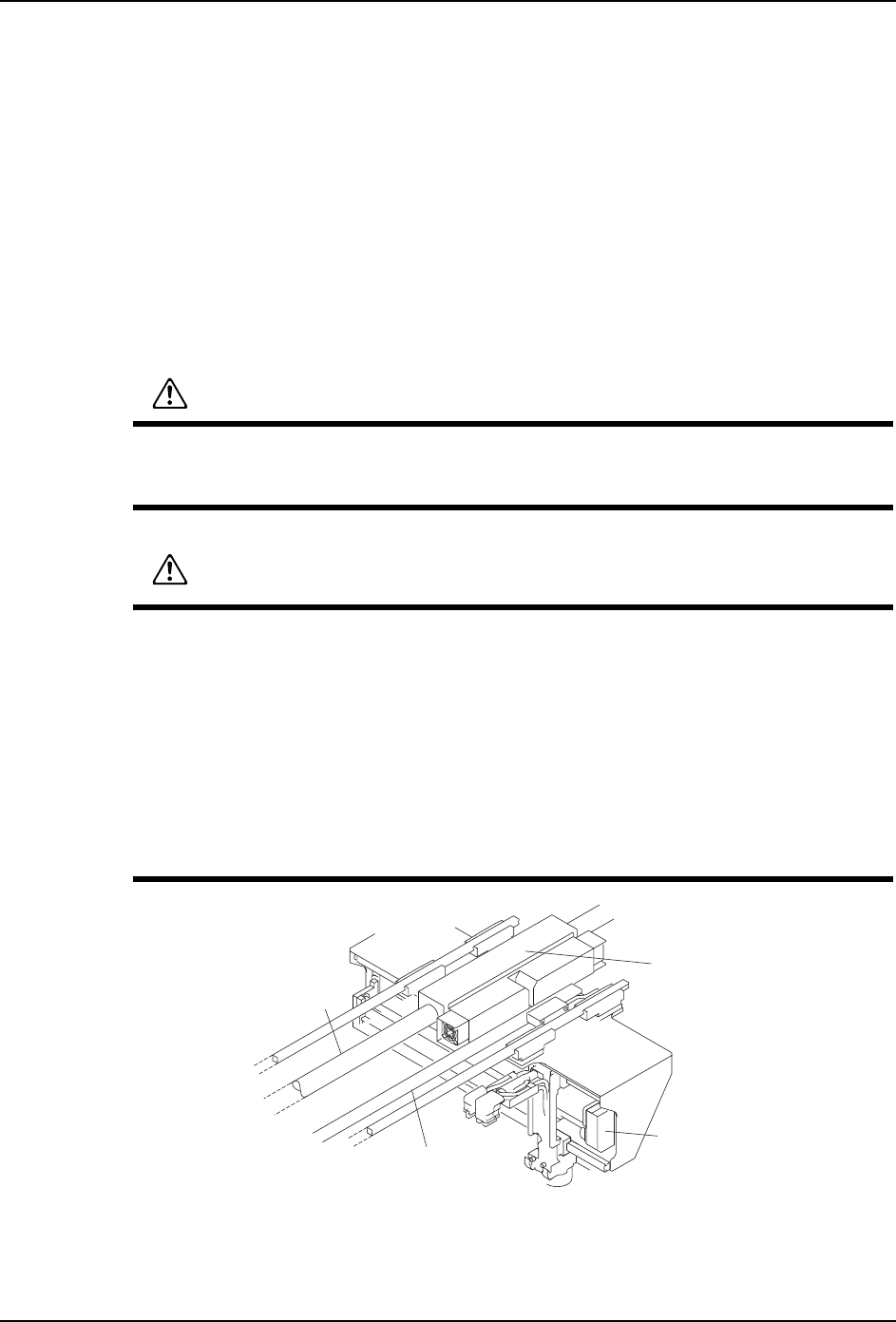
a. 旋转滚珠丝杆使搬运轨道宽度趋向狭窄的方向。(一边看显示在传感器上的进光量一
边使其显示为正值进行旋转。正值显示后自动调节灵敏度功能恢复。)
b. 使用附加软件安装传感器灵敏度。(请参考 「9.3.1 远程调整方法」。)
c. 使用机器上的安装器放大器,安装传感器灵敏度。(请参考 「9.3.2 机器上的调整方
法 」。)
警告
模组刚运转后,请不要直接触摸线性马达的轴和线圈部分。有可能因高温被灼伤。
模组的线性马达有强力的磁性。使用心藏起搏器的用户,请不要接近线性马达的轴或者
线圈部分 (请离开 400mm 以上进行操作)。有可能因为磁力造成心藏起搏器的误动。
注意
将 XY 机械手用手进行移动时,请抓住框架部分。抓住贴装工作头主体或者手柄时,请
请不要压住 X 轴的齿轮盖罩。因为齿轮盖罩有可能变形。
在模组的线性马达附近请不要将工具等靠近。有时会因磁力吸引而产生以外的受伤。
在模组的线性马达附近 (55mm 以内 ) 操作时,请不要使用通常的工具。请使用非磁性的
工具。
在模组的线性马达附近 (55mm 以内 ),请不要将磁卡、手表、精密仪器等靠近。有可能
因磁力而产生故障。
在进行工作头更换和维修保养操作时,请注意不要将物品碰到线性马达上 , 会造成损
伤,如果在线性标尺上发生了伤痕或者错误时 , 有可能不能生产。那时,有必要更换线
性马达。
01MEC-0324Sb
㒓ᗻᷛሎ
;䕈啓䕂Ⲫ㔽
㒓ᗻ偀䖒㒓䚼ߚ
㒓ᗻ偀䖒䕈
9. 测定和调整 QD145-11
514 NXT II 机械手册
9.3.1 远程调整方法
使用附加软件调整传感器的灵敏度。用此方法 1 次就可以调整在模组上所有的搬运轨道传感
器。
1. 启动附加软件,请从 「前台显示屏」中选择对象的机器的名称。显示出注册画面。
2. 请直接输入用户 ID 或者从指定的选择框中指定。
3. 请正确地输入密码后单击 「注册」。
4. 选择进行调整传感器的模组后单击 「远程操作」。
5. 请选择 「调整搬运轨道传感器的灵敏度」。
6. 请确认电路板等的传感器是否有遮住后按下 「开始」按钮。进行选择模组的电路板通过
传感器的灵敏度的调整。
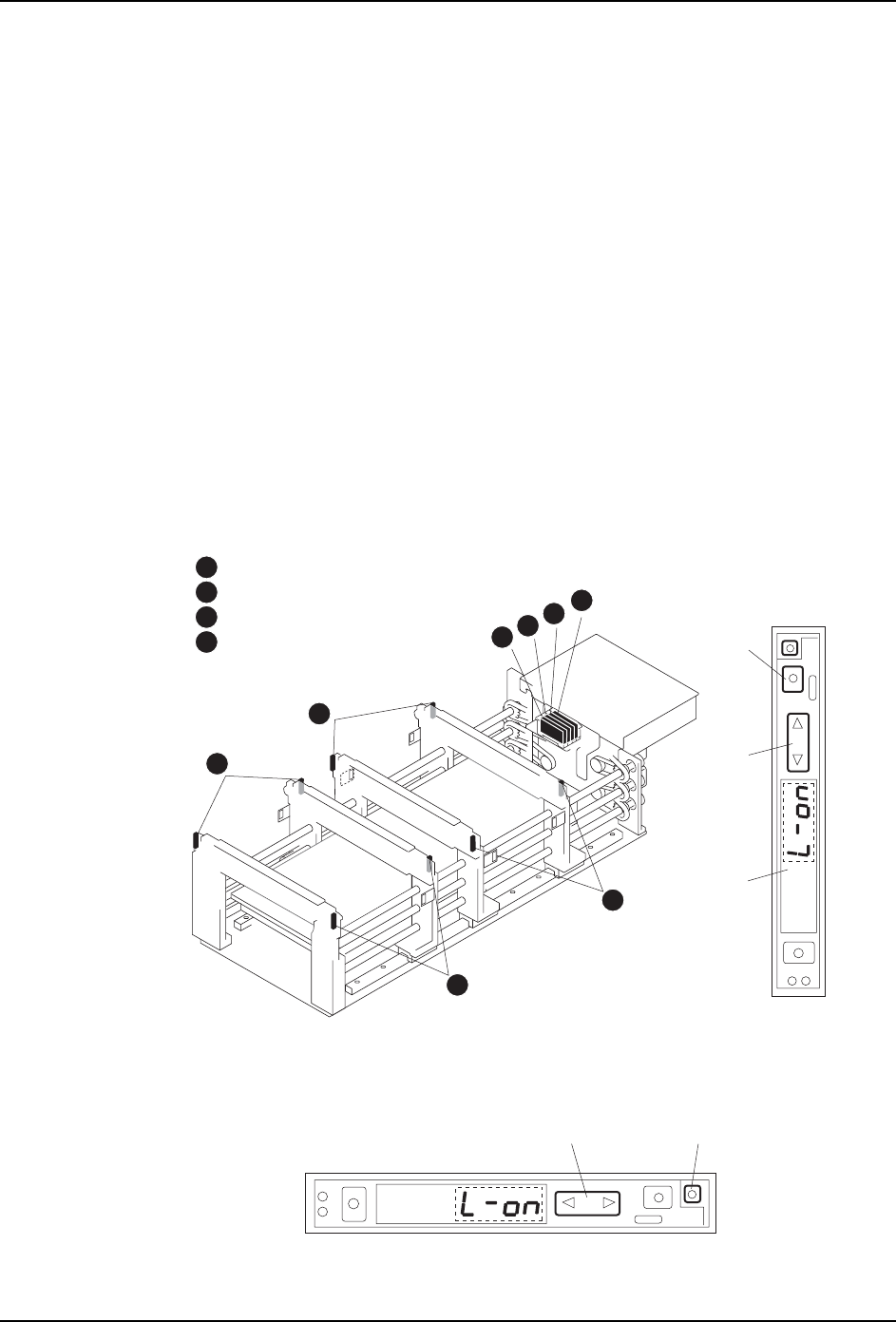
9.3.2 机器上的调整方法
操作机器上的各个传感器的放大器进行调整。
1. 将要调整的模组向前方拉出。(请参考 「5.1 模组的拉出 / 插入」。)
2. 打开传感器放大器的盖罩。
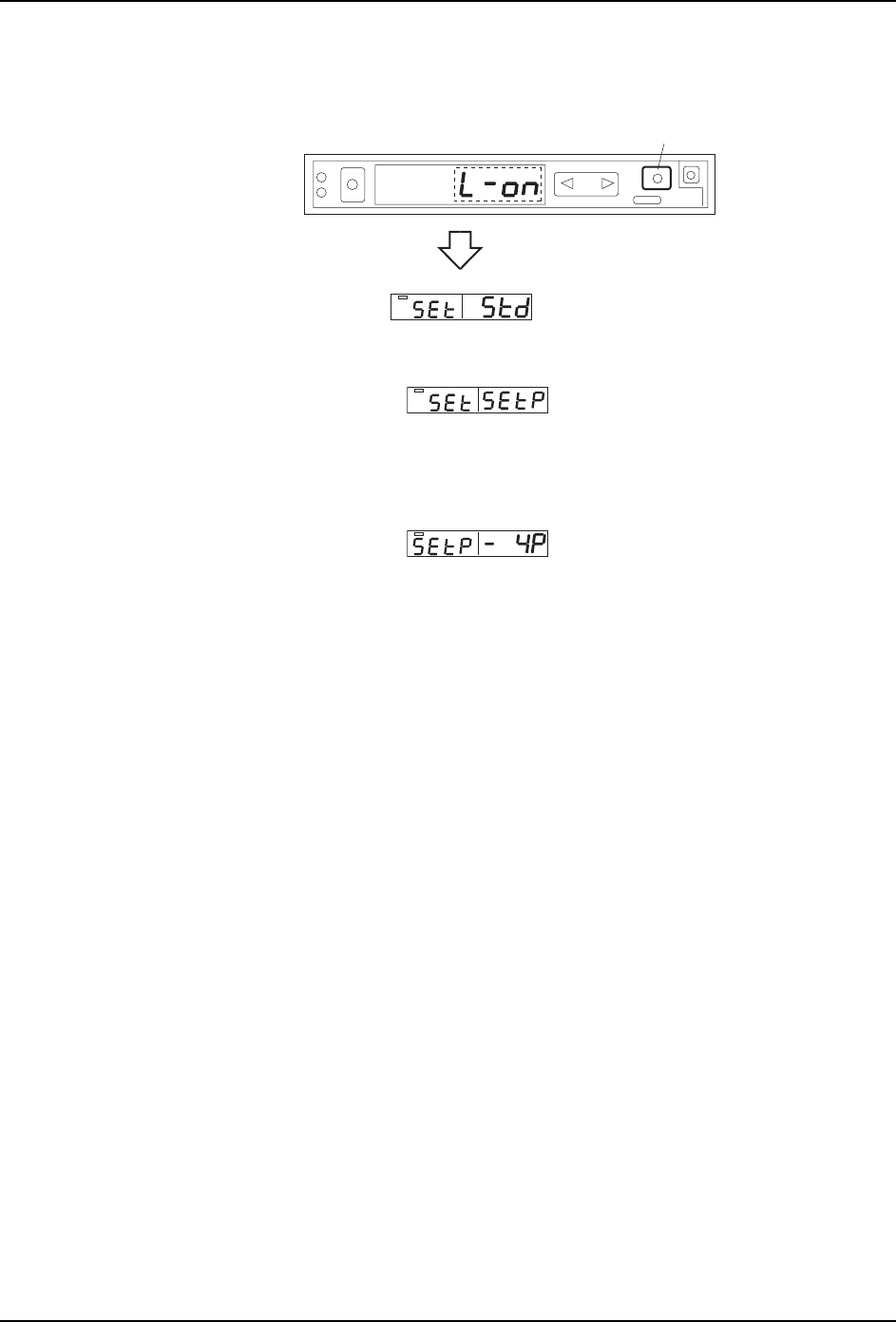
3. 请把输入模式设定为 「L-on」(避光时 OFF)。
·请按下按键 (1),在 5 秒之内按下按键 (2)。
1
2
3
4
2
4
1
3
01MEC-0336Sb
1
䗮䘧ࠡջᨀ䖤䔼䘧Ӵᛳ఼
.*
䗮䘧ৢջᨀ䖤䔼䘧Ӵᛳ఼
4*
䗮䘧ࠡջᨀ䖤䔼䘧Ӵᛳ఼
.*
䗮䘧ৢջᨀ䖤䔼䘧Ӵᛳ఼
4*
2
3
4
ᰒ⼎⬏䴶
ㆁ༈䬂
MODEᣝ䬂
01MEC-0337a
12