3OM-996-005.pdf - 第115页
(C02) Placement Data (P-data) (C02_01) Unit Control Select one of the following options to determine whether the selected placement data (U01, U02, ..... Un) should be used. In normal cases, select "Placement".…
2.5 Placement Data
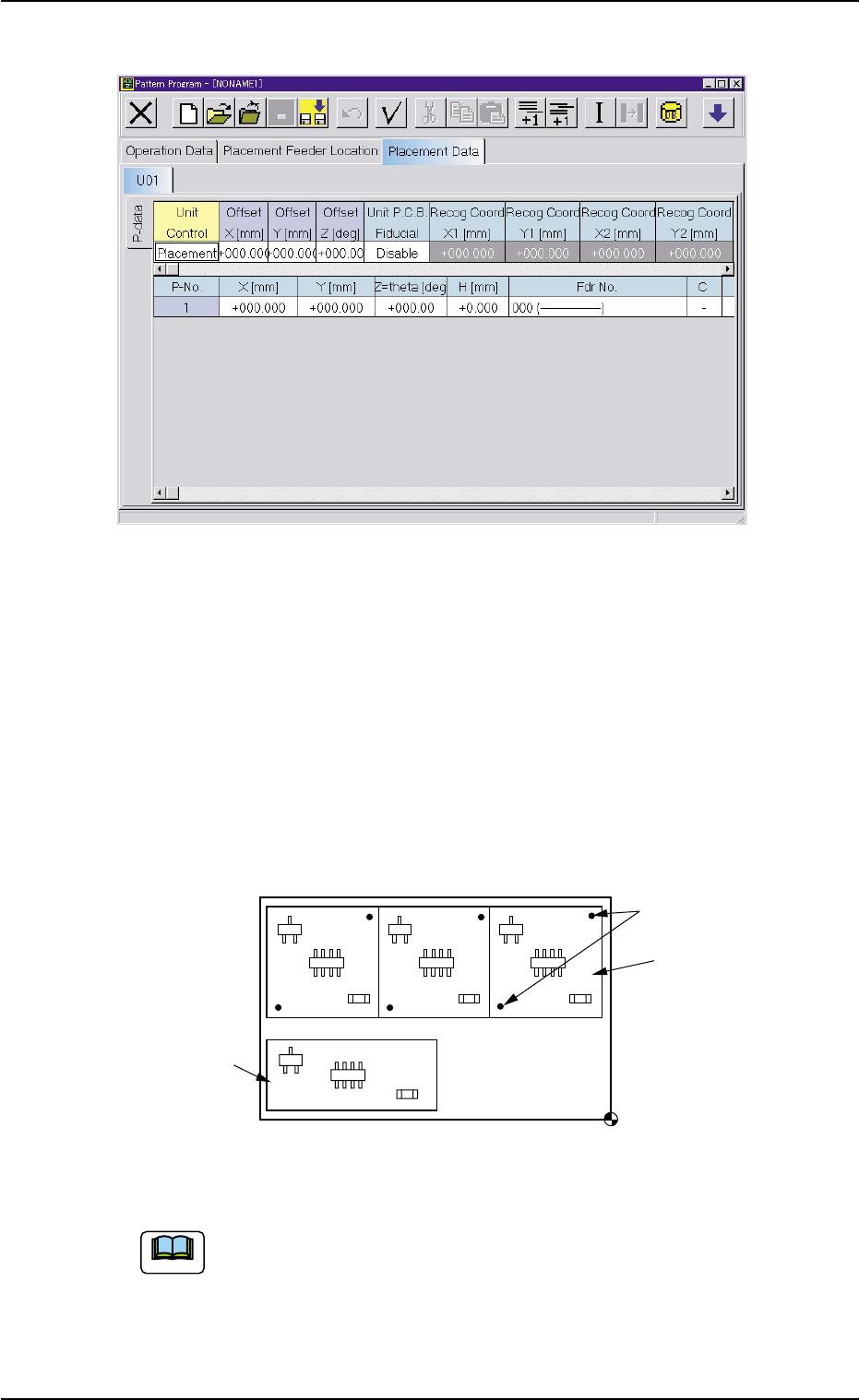
Fig. 3B85 Edit Window (Example)
(C01) Placement Data Un
(C01_01) Placement Data Unit Designation
Select one of the following tabs (placement data groups) in
one pattern program.
U01 : First Placement Data Group
U02 : Second Placement Data Group
↓
Un : Up to 99 placement data groups can be specified.
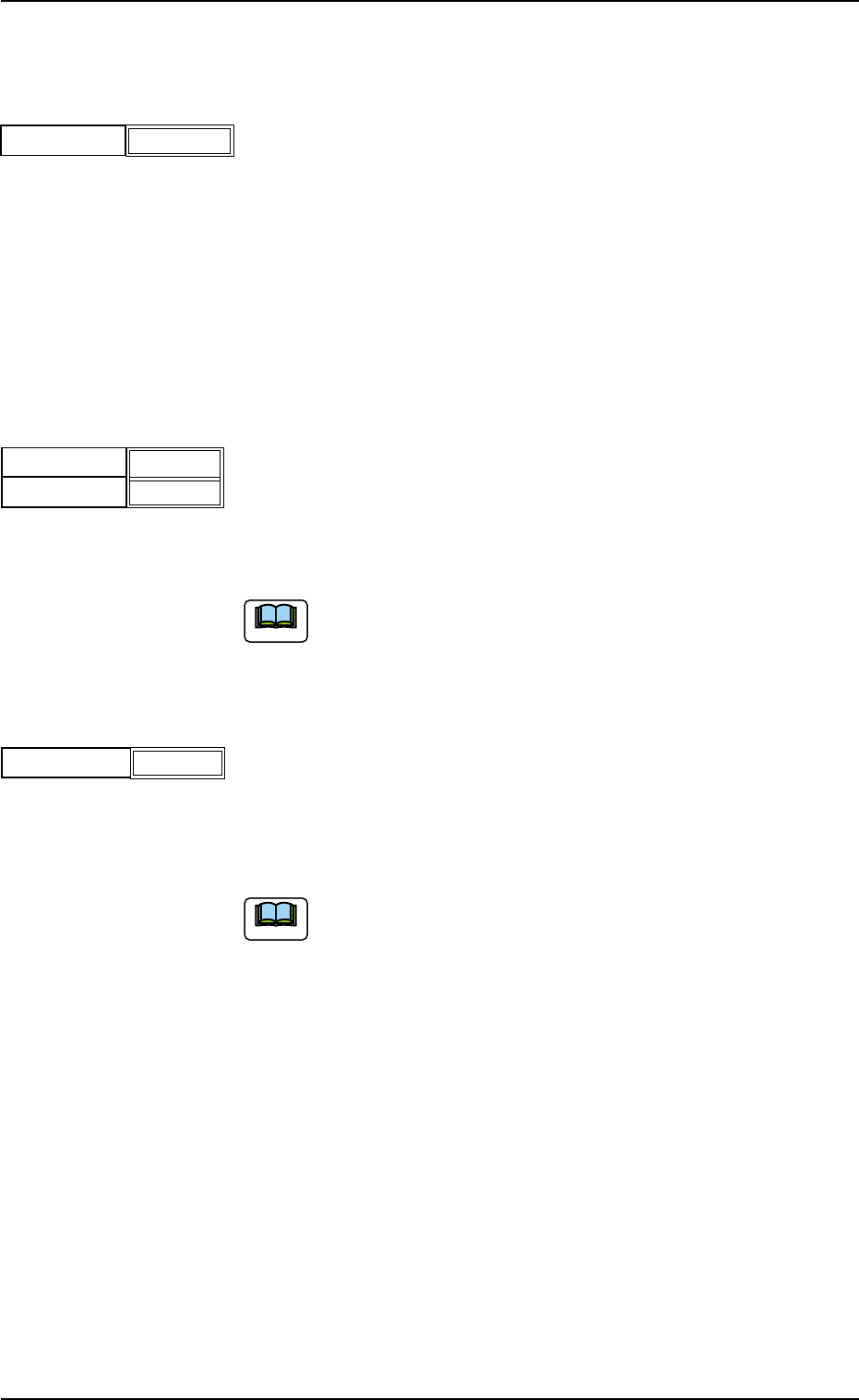
Fig. 3B86 Example of Placement Data (TCM-X210)
(a) "U01" is used in normal cases.
(b) The operation and feeder location data are used commonly.
(c) Refer to "2.1Types of P.C.B.’s and Required Data" and "Exemplified
Data Creation" for details.
(d) The placement coordinate reference of TCM-X110 is "Rear Left".
U02
U01
Fiducial Marks
Placement Coordinate Reference Point
Note
2.5 Placement Data
0305-001 2-45 AIM01EDTP
(C02) Placement Data (P-data)
(C02_01) Unit Control
Select one of the following options to determine whether the selected
placement data (U01, U02, ..... Un) should be used.
In normal cases, select "Placement".
Placement : The placement data of the selected unit (group) be-
comes valid.
Bypass : The placement data of the selected unit (group) be-
comes invalid.
Offset X [mm] and Offset Y [mm]
Set the offset values for all placement coordinates X and Y and the
recognition coordinates of the unit P.C.B. in the placement data (P-
data).
Unit: mm
(a) Use "000.000" (zero) in normal cases.
(b) Note that these offset values do not give any effect to the
coordinates (X [mm] and Y [mm]) of "(A02_02) P.E.C.
recognition mode global".
Offset Z [deg]
Set the offset value for all placement angles (Z=Theta) in the place-
ment data (P-data).
Unit: °(degree)
Use "000.00" (zero) in normal cases.
Note
Note
2.5 Placement Data
0305-001 2-46 AIM01EDTP
Placement
Unit Control
Fig. 3B87
Fig. 3B88
Offset X [mm]
Offset Y [mm]
+000.000
+000.000
Fig. 3B89
+000.00
Offset Z [deg]
(C02_02) Unit P.C.B. Fiducial
Select one of the following options to determine whether or not the unit
P.C.B. B.B.R. function should be used.
Disable : The unit P.C.B. B.B.R. function is not used.
Enable : The unit P.C.B. B.B.R. function (2-point recognition) is
used.
• When "Enable" is set, the recognition coordinates differ as shown
in below (1) and (2) according to the parameter set in the "P.E.C.
recognition mode image" text box (described in (A02_01) P.E.C. rec-
ognition function). Refer to "(A02) P.E.C. Recognition Data" in "2.3
Operation Data".
Options for Image Recognition Mode
(1) "Enable" (Normal Image Recognition Mode)
(2) "U-N" in "P.E.C. recognition mode image" Text Box
(1) The following is based on the parameter "Enable" (Normal Image Rec-
ognition Mode).
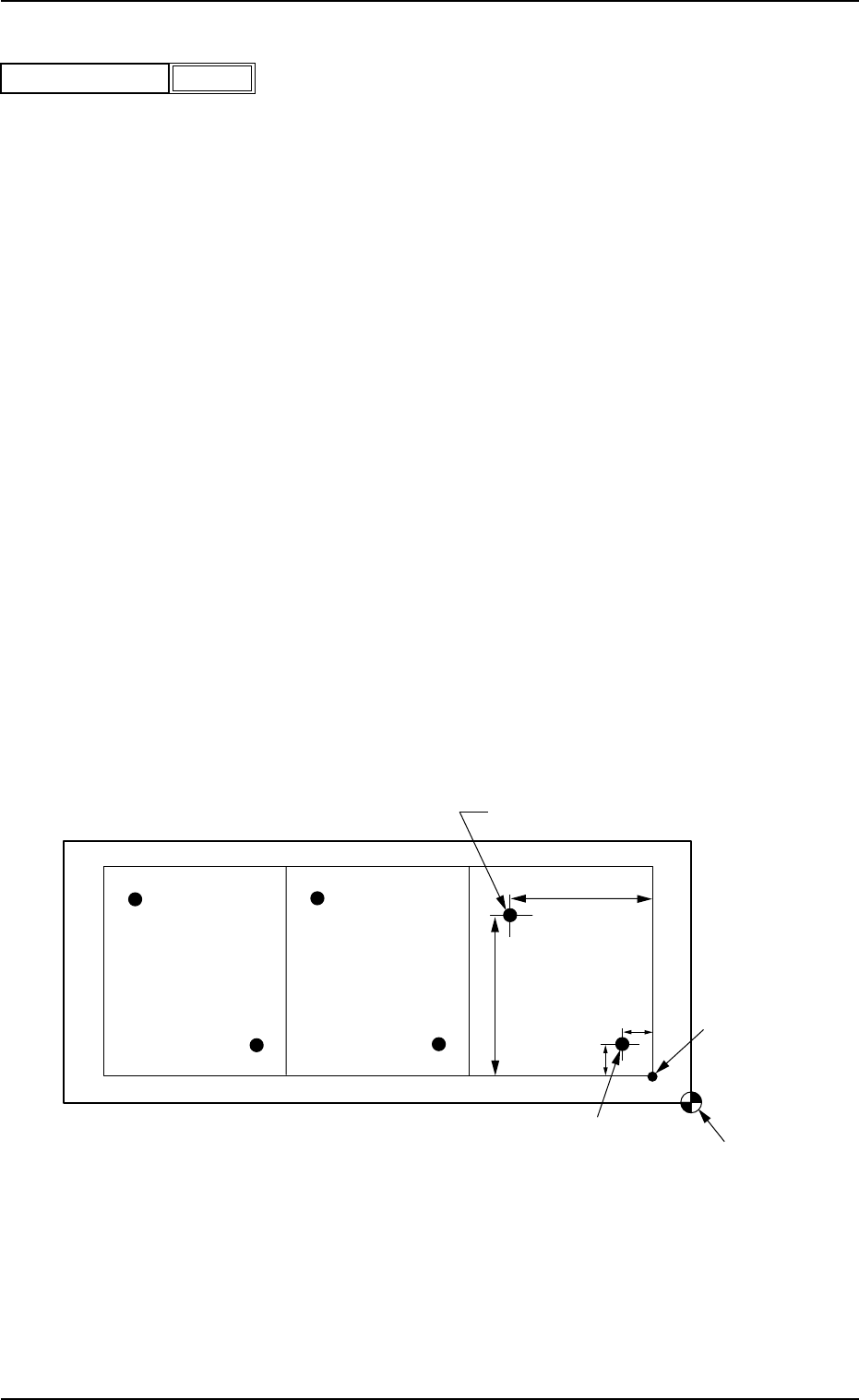
Fig. 3B91-1 Example of Unit P.C.B. B.B.R. Recognition
2.5 Placement Data
0305-001 2-47 AIM01EDTP
Enable
Unit P.C.B. Fiducial
Fig. 3B90
Placement Coordinate Reference Point
Pattern Origin
Second Fiducial Mark
First Fiducial Mark
Y
2
X
2
Y
1
X
1
TCM-X210 TCM-X300