3OM-996-005.pdf - 第333页
0510-001 5-47-3 AIM01EDTP 3.3 "Auto Operation" T ab • Example of "Bias" Setting of Operation Parameters # of picks [times] = 3, (X) adjustment [%] = 50, (Y) adjustment [%] = 50 Mode = Bias, Bias coeff…
0510-001 5-47-2 AIM01EDTP
3.3 "Auto Operation" Tab
Sampling Bias
Compared with "Standard", it is possible to set larger follow-up
and sensitivity coefficients of the first and second corrections
(fixed) made after component replacement.
The follow-ups can be set more sensitive than "Bias".
First Follow-Up
Deviation (Corrected Values) as Result of 1-time Component Recognition ×
(((X) adjustment [%] , (Y) adjustment [%]) + (Bias coefficient (X) [%], Bias coefficient (Y) [%]))
Second Follow-Up
Mean of Deviations (Corrected Value) as Results of 2-time Component Recognitions ×
(((X) adjustment [%] , (Y) adjustment [%]) + (Bias coefficient (X) [%], Bias coefficient (Y) [%])/2)
(a) As for the third and subsequent follow-ups, the de-
viations are the same as those in the standard
specifications.
(b) When the coefficients "((X) adjustment [%] , (Y) ad-
justment [%]) + (Bias coefficient (X) [%], Bias coef-
ficient (Y) [%])" or "((X) adjustment [%] , (Y) adjust-
ment [%]) + (Bias coefficient (X) [%], Bias coeffi-
cient (Y) [%])/2" are calculated to be "more than
100%", they are regarded as "100%".
Bias coefficient (X) [%]
Set the value of the follow-up bias coefficient (X).
Bias coefficient (Y) [%]
Set the value of the follow-up bias coefficient (Y).
Note
0510-001 5-47-3 AIM01EDTP
3.3 "Auto Operation" Tab
• Example of "Bias"
Setting of Operation Parameters
# of picks [times] = 3, (X) adjustment [%] = 50,
(Y) adjustment [%] = 50
Mode = Bias, Bias coefficient (X) [%] = 40,
Bias coefficient (Y) [%] = 40
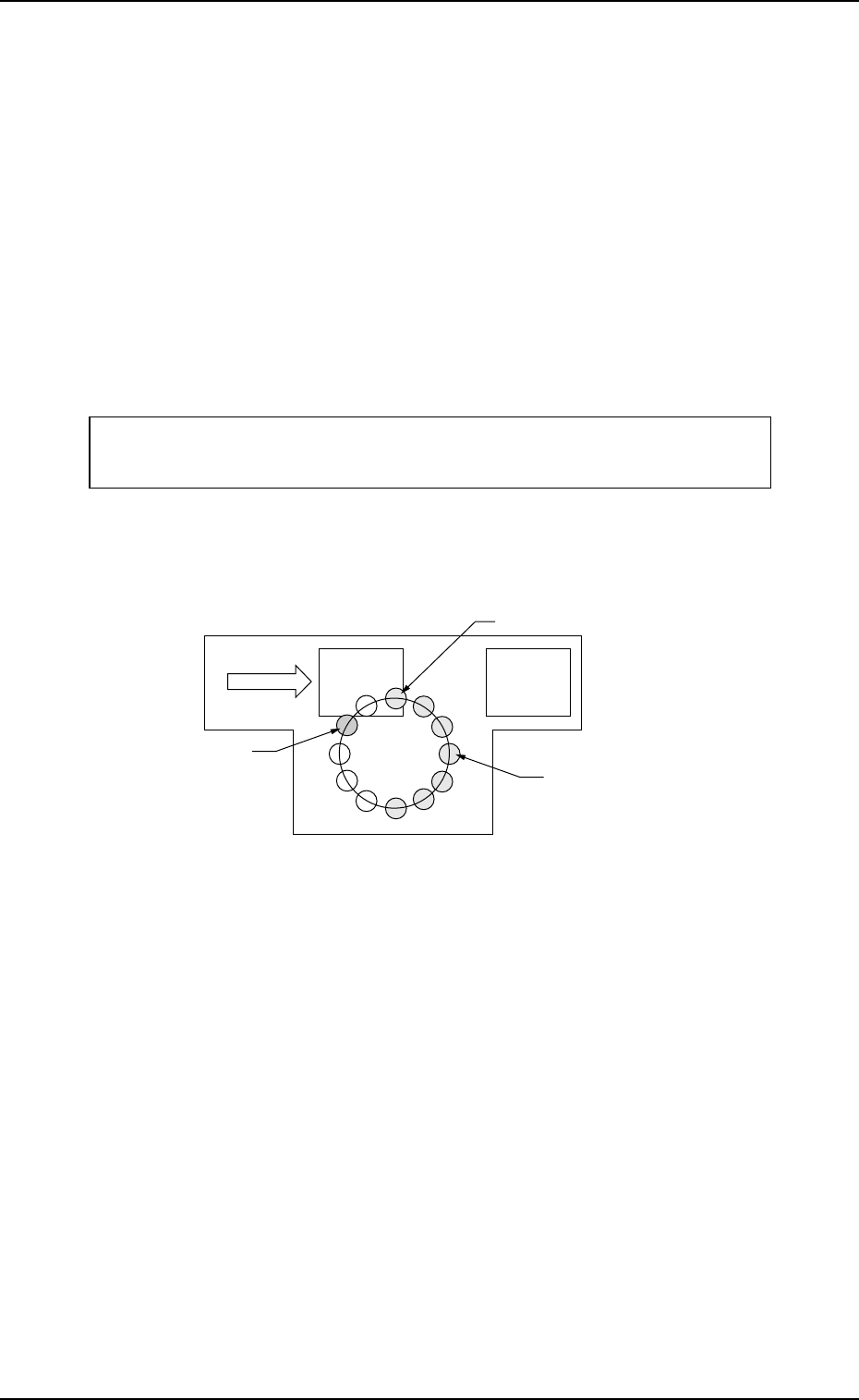
First Follow-Up after Component Replacement
The deviations are measured based on the component recogni-
tions that were performed as frequently as the number of com-
ponent picks (3 times = number of samples) after component
replacement.
Mean of Deviations as Results of 3-time Recognitions ×
90% (50% + 40%) = Calculation of First Corrected Value
This "First Corrected Value" is reflected on the pickup motions
taken subsequently after "Next" in the figure.
1
2
3
Next
Fig. 3E44-1
Component
Recognition
Component Pickup
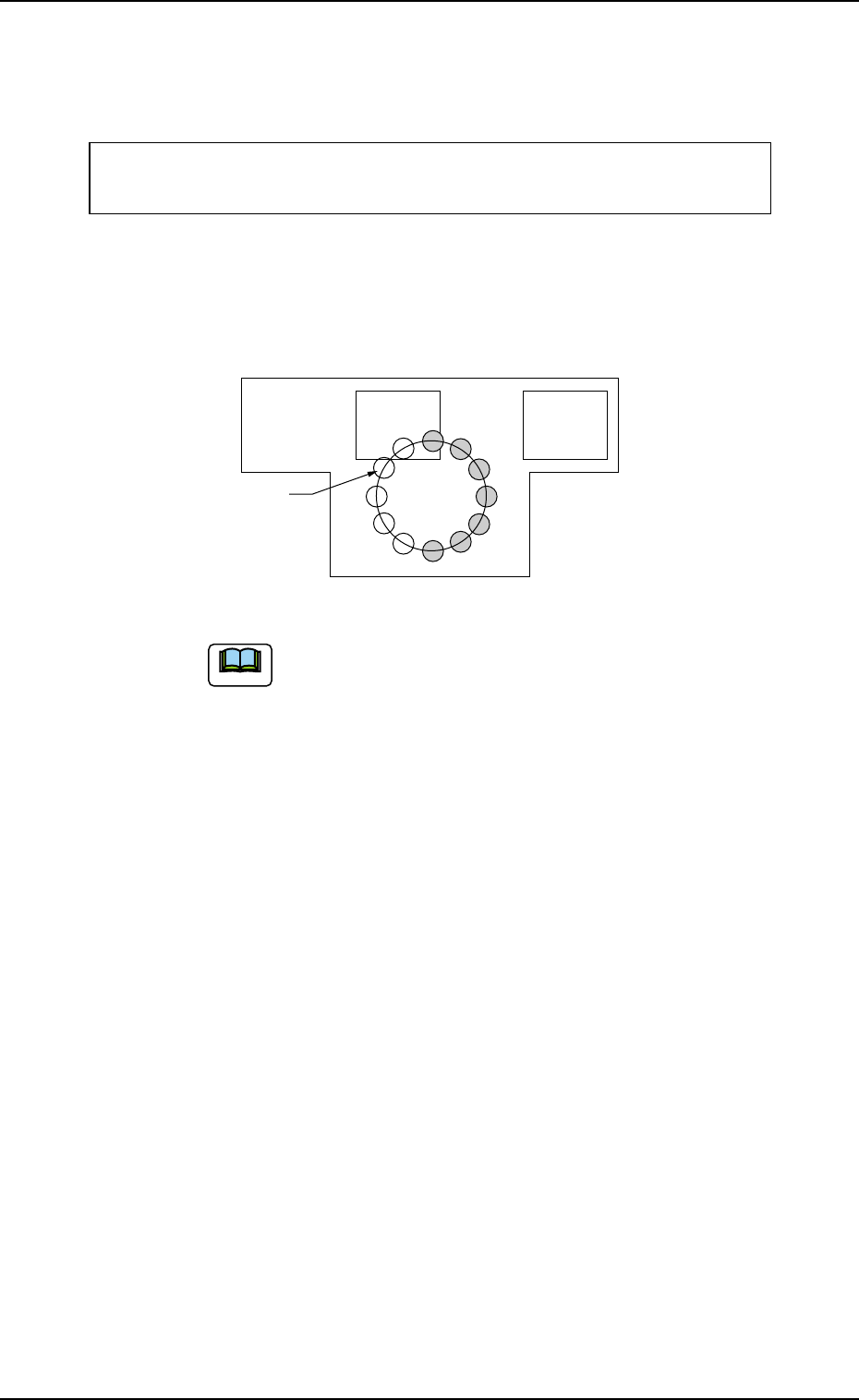
Second Follow-Up after Component Replacement
Components are picked up and recognized based on the first
corrected value as frequently as the specified number of picks.
Mean of Deviations as Results of 3-time Recognitions ×
70% (50% + 40%/2) = Calculation of Second Corrected Value
This "Second Corrected Value" is also reflected on the pickup
motions taken subsequently after "Next" in the figure.
(The third and subsequent follow-ups are the same as "Stan-
dard".)
The amount of feedback is saved in Reel Offset B.
1
2
3
Next
Fig. 3E44-2
Note
0510-001 5-47-4 AIM01EDTP
3.3 "Auto Operation" Tab