3OM-996-005.pdf - 第334页
Second Follow-Up after Component Replacement Components are picked up and recognized based on the first corrected value as frequently as the specified number of picks. Mean of Deviations as Results of 3-time Recognitions…
0510-001 5-47-3 AIM01EDTP
3.3 "Auto Operation" Tab
• Example of "Bias"
Setting of Operation Parameters
# of picks [times] = 3, (X) adjustment [%] = 50,
(Y) adjustment [%] = 50
Mode = Bias, Bias coefficient (X) [%] = 40,
Bias coefficient (Y) [%] = 40
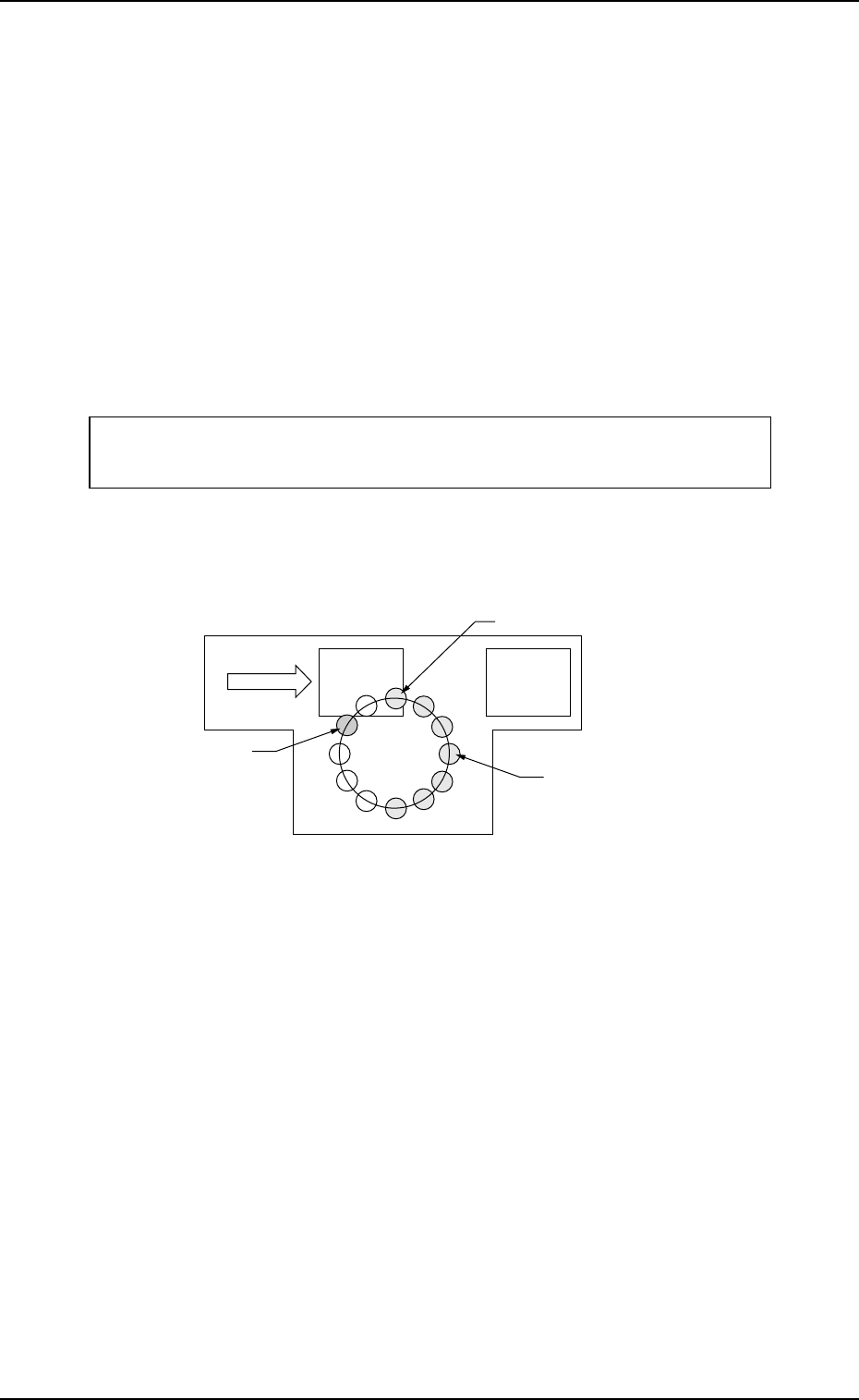
First Follow-Up after Component Replacement
The deviations are measured based on the component recogni-
tions that were performed as frequently as the number of com-
ponent picks (3 times = number of samples) after component
replacement.
Mean of Deviations as Results of 3-time Recognitions ×
90% (50% + 40%) = Calculation of First Corrected Value
This "First Corrected Value" is reflected on the pickup motions
taken subsequently after "Next" in the figure.
1
2
3
Next
Fig. 3E44-1
Component
Recognition
Component Pickup
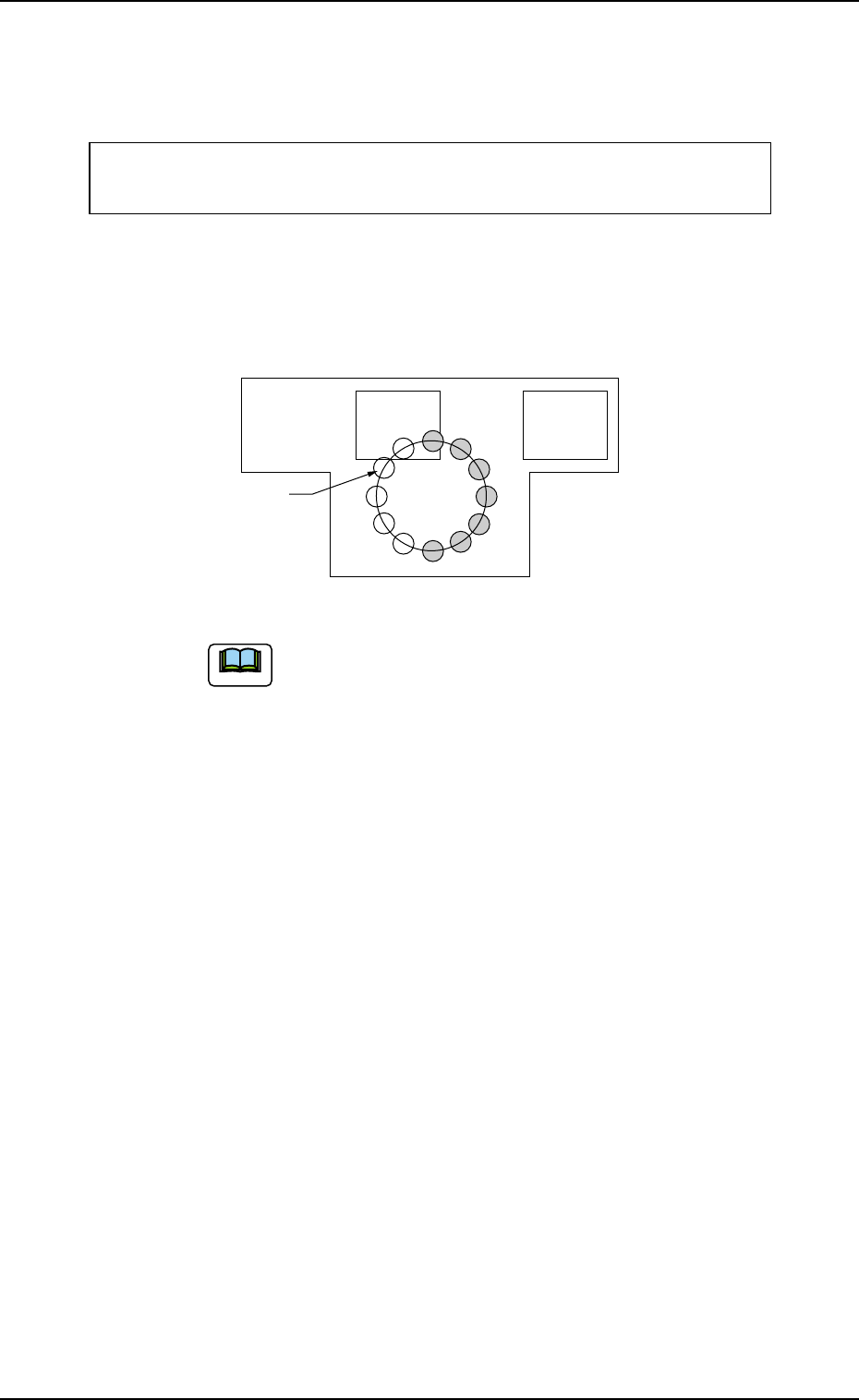
Second Follow-Up after Component Replacement
Components are picked up and recognized based on the first
corrected value as frequently as the specified number of picks.
Mean of Deviations as Results of 3-time Recognitions ×
70% (50% + 40%/2) = Calculation of Second Corrected Value
This "Second Corrected Value" is also reflected on the pickup
motions taken subsequently after "Next" in the figure.
(The third and subsequent follow-ups are the same as "Stan-
dard".)
The amount of feedback is saved in Reel Offset B.
1
2
3
Next
Fig. 3E44-2
Note
0510-001 5-47-4 AIM01EDTP
3.3 "Auto Operation" Tab
0510-001 5-47-5 AIM01EDTP
3.3 "Auto Operation" Tab
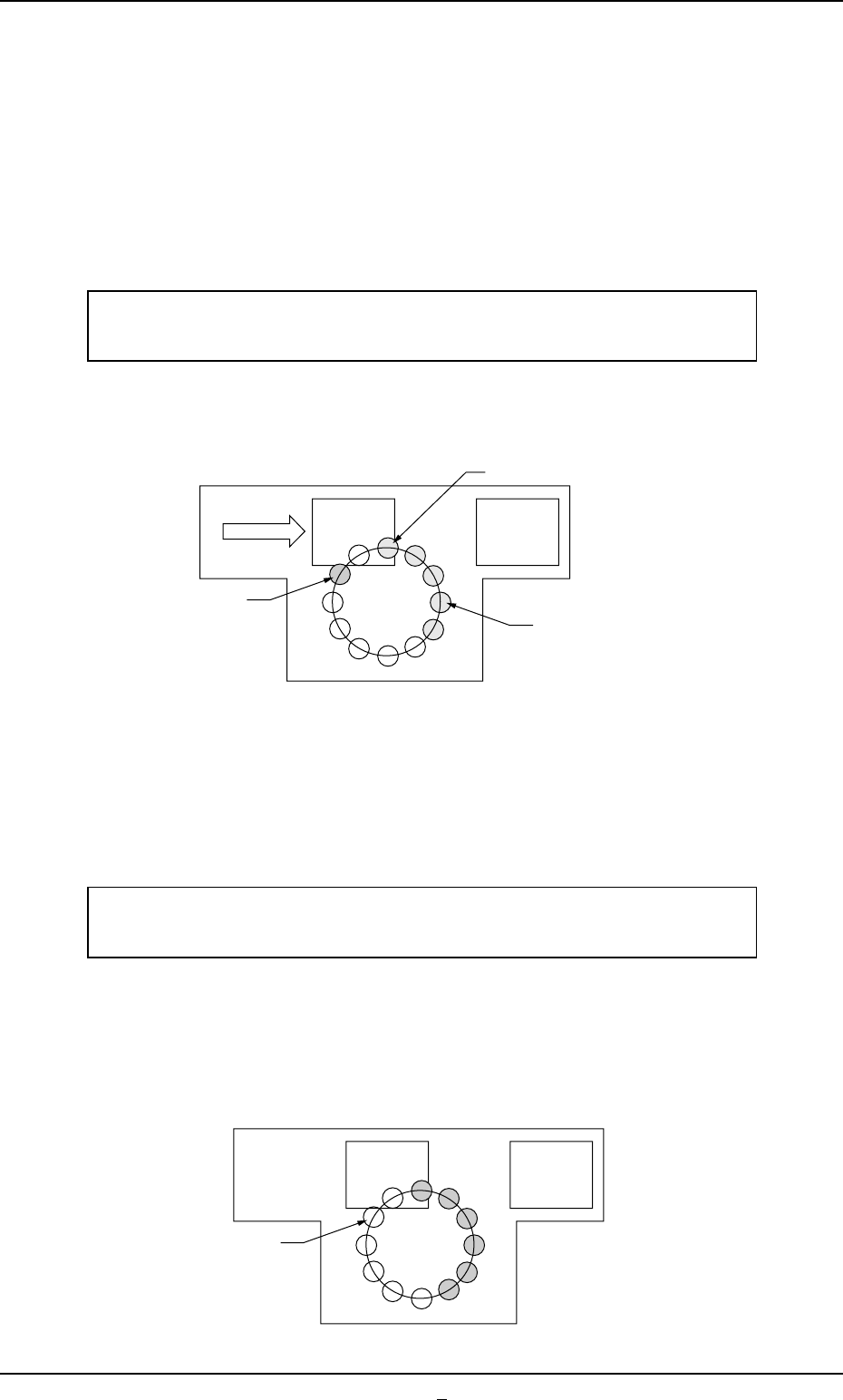
• Example of "Sampling Bias"
Mode = Sampling Bias, Bias coefficient (X) [%] = 50,
Bias coefficient (Y) [%] = 50
First Follow-Up after Component Replacement
The deviation is measured based on the first (= sample) compo-
nent recognition that was performed when a component was
picked up after component replacement.
Deviation as Result of 1-time Recognition ×
90% (50% + 40%) = Calculation of First Corrected Value
This "First Corrected Value" is reflected on the pickup motions
taken subsequently after "Next" in the figure.
Second Follow-Up after Component Replacement
The deviations are measured based on the component recogni-
tions that were performed twice (the number of component picks)
with the first corrected value.
Mean of Deviations as Results of 2-time Recognitions ×
70% (50% + 40%/2) = Calculation of Second Corrected Value
This "Second Corrected Value" is also reflected on the pickup
motions taken subsequently after "Next" in the figure.
(The third and subsequent follow-ups are the same as "Stan-
dard".)
1
Next
Fig. 3E44-3
Component
Recognition
Component Pickup
1
2
Next
Fig. 3E44-4