3OM-996-005.pdf - 第307页
0305-001 5-26 AIM01EDTP *3 High Mag X [mm], High Mag Y [mm], Low Mag X [mm], Low Mag Y [mm] The travel of the X/Y table is corrected according to the angle (0 ° , 90 ° , 180 ° , or 270 ° , 4 directions) specified in the …
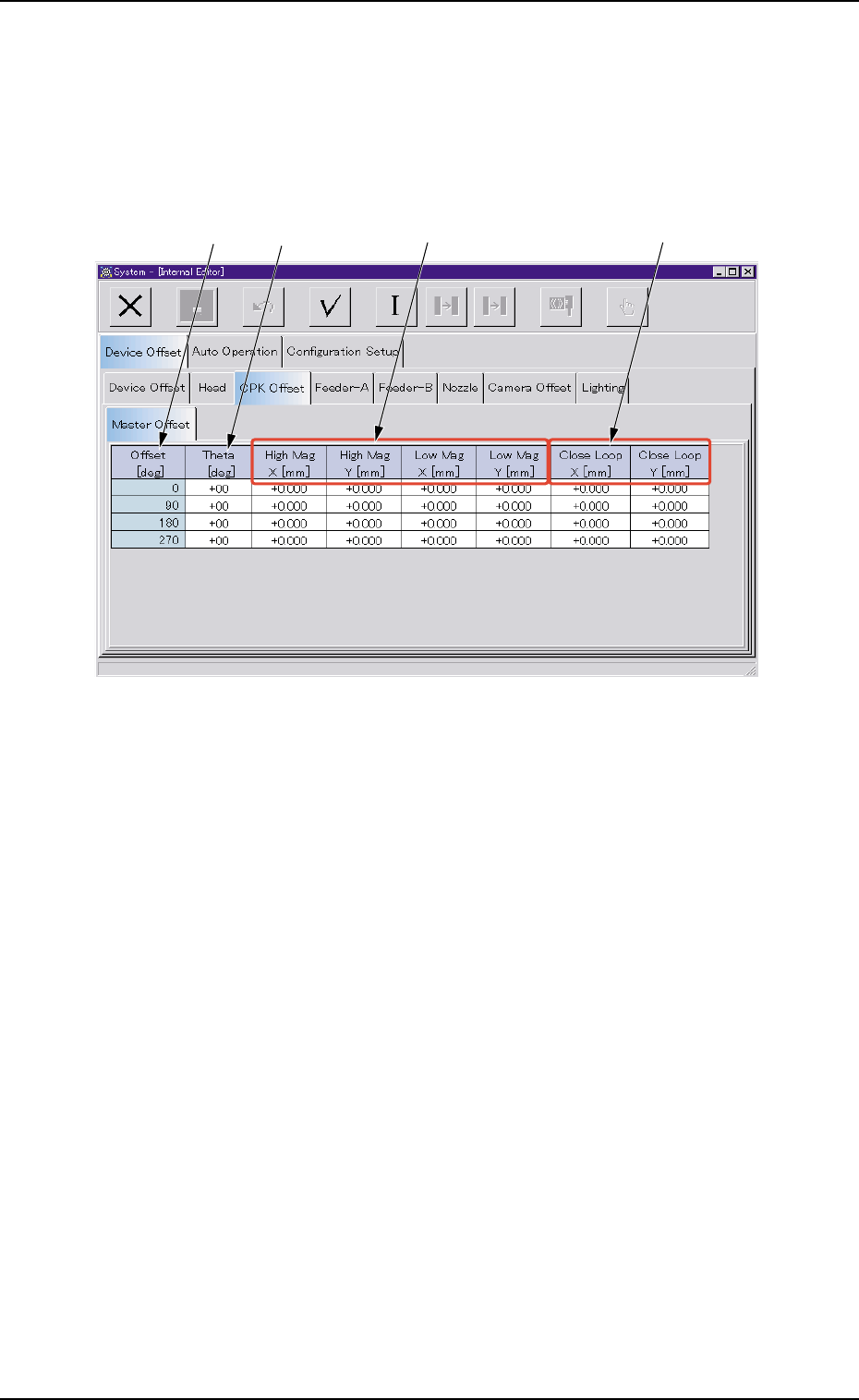
(1) "Master Offset" Tab
• Sheet Layout
When the "Master Offset" tab is pressed in the "CPK Offset" tab sheet,
the following tab sheet appears.
Fig. 3E26 "Master Offset" Tab Sheet
• Sheet Composition
*1 Offset [deg]
Displayed are the angles (0, 90, 180, and 270) specified in the place-
ment data.
*2 Theta [deg]
This is the offset data for angle difference between the X/Y table and
camera coordinate systems.
0305-001 5-25
AIM01EDTP
3.2 "Device Offset" Tab
*1
*2 *3 *4

0305-001 5-26 AIM01EDTP
*3 High Mag X [mm], High Mag Y [mm], Low Mag X [mm], Low Mag
Y [mm]
The travel of the X/Y table is corrected according to the angle (0°,
90°, 180°, or 270°, 4 directions) specified in the placement data
when components are placed.
(a) The data input range is "-0.15 to +0.15 mm"
(b) When parameters with "+" sign are entered for both "X
[mm]" and "Y [mm]", they are added to the parameters
in the "X" and "Y" directions of the pattern program data.
(c) Change each parameter every time deviated compo-
nent position (X and Y) is found as a result of compo-
nent placement based on each placement angle data.
*4 Close Loop X [mm], Close Loop Y [mm]
(Not Available)
3.2 "Device Offset" Tab
Note

0305-001 5-27 AIM01EDTP
3.2.4 "Feeder-A" and "Feeder-B" Tabs
• "Feeder-A"
This is the offset data used to correct variation in each feeder slot No.
(Fdr. No.) of the feeder carriages.
The parameters measured at shipment of the machine are en-
tered.
Do not change the parameters unless necessary.
• "Feeder-B"
This is the offset data used to correct variation in each feeder slot No.
(Fdr. No.) of the feeder carriages.
X [mm], Y [mm]
When the [Enable] buttons are selected for both "(X) Dir." and "(Y)
Dir." in the "Auto Fdr. Axis Set" group box (Operation Sequence:
"[OPN. MODE] Button on Submenu Bar" Æ "Opn. Mode" Tab
Sheet"), component recognition processing is performed during
automatic operation to track the positional relation between the
nozzle and component centers. After that, the parameters (X and
Y) are automatically updated for better pickup posture (pickup on
the component center).
In normal cases, it is not necessary to enter any parameter.
Parameters in "L [mm]" Text Boxes
These parameters are not updated automatically but the entered
ones are reflected.
3.2 "Device Offset" Tab
Note