CP8机械手册.pdf - 第32页
各部分的功能和名称 >> 机器构成 3-8 MEC-CP-842-1.0S 1~16 个工作站 表示 16 个贴装工作头的各个位置。 在本书中, 有时将 [ 工作站 ] 简略地用 "ST" 来表示。 对于 1~16ST , 每一站的功能是不一样 的。以下对各站进行说明。 1ST : 从供料器上吸取元件、执行 供料器的送料以及 NY 轴的吸件位置修正。 2ST : 使用传感器进行有无大型元件的检 查。 另外…
各部分的功能和名称 >> 机器构成
MEC-CP-842-1.0S 3-7
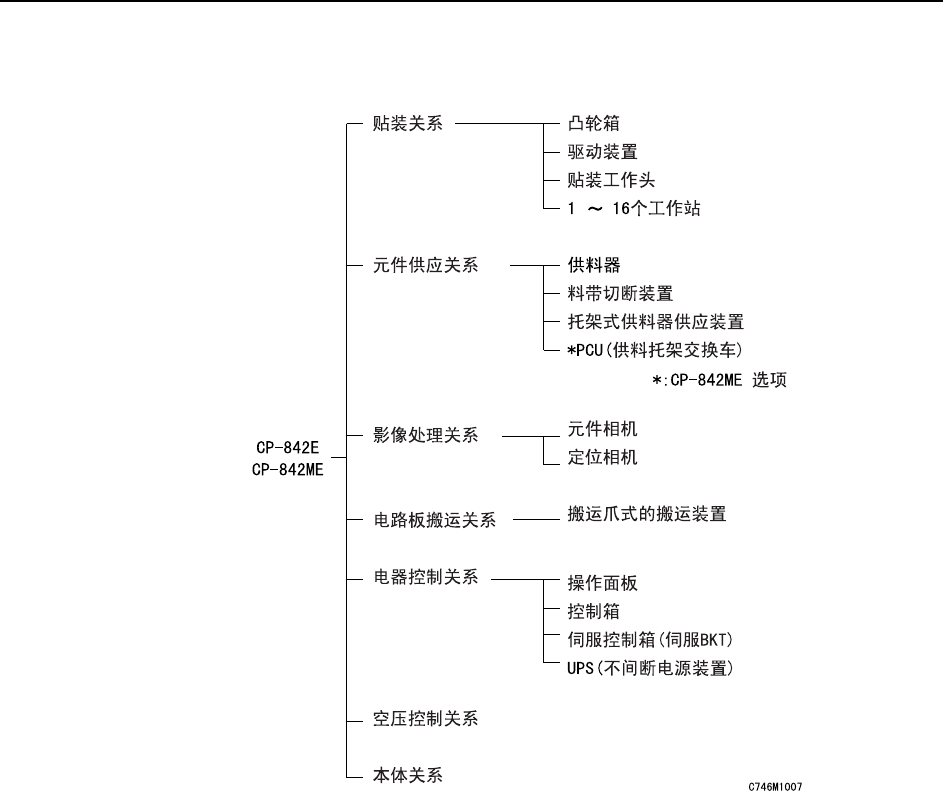
3.2 机器构成
3.2.1 贴装关系
凸轮箱
凸轮箱由凸轮轴马达、驱动装置、凸轮轴、凸轮杆、汽缸等部分构成。
驱动装置
在凸轮箱内装备有 2 个驱动装置,它们分别是:驱动贴装工作头离合器部分动作的驱动装置
和驱动吸嘴头部分动作的驱动装置。
贴装工作头
旋转主轴的周围安装有 16 个贴装工作头,它们是由吸嘴、旋转轴、吸嘴头等组成的。贴装
工作头持有 6 种吸嘴,可以根据装贴元件尺寸的不同而分别使用。贴装工作头的主要工作是
从供料器上吸取元件、抓住元件进行影像处理、并往电路板上装贴元件。

各部分的功能和名称 >> 机器构成
3-8 MEC-CP-842-1.0S
1~16 个工作站
表示 16 个贴装工作头的各个位置。
在本书中,有时将 [ 工作站 ] 简略地用 "ST" 来表示。对于 1~16ST,每一站的功能是不一样
的。以下对各站进行说明。
1ST :从供料器上吸取元件、执行供料器的送料以及 NY 轴的吸件位置修正。
2ST : 使用传感器进行有无大型元件的检查。
另外,进行预转 (P θ)动作。所谓预转,就是将在 1ST 处被吸嘴吸取的元件旋转到生产
程序指定角度附近的功能,旋转以每 90 度单位进行。
5ST : 使用 WIDE VIEW (宽视野用)和 NARROW VIEW(窄视野用)2 个 CCD 相机,
来检查吸嘴上元件的吸着姿势、元件形状以及有无元件等。
6ST : 测定被吸取在吸嘴上的元件的高度。
另外,还测定吸嘴的长度 (选项)。
8ST :进行最终贴装角度旋转 (F θ)动作。根据 5ST 的影像处理结果的数据,使用伺服马
达将元件旋转到最终贴装角度。
9ST :往电路板上进行元件的装贴。对于在 5ST 的影像处理时被判断为不良的元件,不进行
装贴。
10ST :进行预转 (P θ)和最终贴装角度旋转 (F θ)的还原。此外,确认吸嘴离合器的
初始位置以及离合器的啮合情况。
11ST :确认在吸取时下降的吸嘴是否返回到原来的位置以及对生产信息所必要的吸嘴头A的
位置进行确认。
13ST :将在 5ST 的影像处理时被判断为不良的元件抛弃。
14ST :使吸嘴头旋转对 6 个吸嘴进行切换。
15ST :确认 6 个吸嘴在切换后的位置。
3.2.2 元件供应关系
供料器
供料器是一种把用料带包装的元件送到 1ST 吸件位置上去的装置。
CP-842E/CP-842ME 机型能够使用 CP 系列用的 WC 型供料器。元件料卷为 13 英寸以上
时,请使用装有 CP-7/CP-8 专用的料卷托架的供料器。
废料带处理装置
料带切断装置是在贴装工作头的 1ST 的下方,由上下切刀将供料器送出的废料带进行切断
的装置。
被切断的料带,通过真空吸管将其送到机器下部的废料带收集箱进行回收。

各部分的功能和名称 >> 机器构成
MEC-CP-842-1.0S 3-9
供料平台
放置供料器的平台及搬送平台的装置。 2 个平台根据贴装的生产程序在 D 轴上移动。
CP-842ME 有能够进行搬入到机器中及从机器中搬出的供料托架平台。(选项)
PCU (供料托架交换车)
交换供料托架时使用的推车。
3.2.3 影像处理关系
元件相机
是一种用来认知被吸取在吸嘴上的元件的形状和尺寸的 CCD 相机。
定位相机
由 CCD 相机、灯光及相机安装托架等构成。使用 CCD 相机来读取电路板上的基准定位点
后,在机器内部进行演算和坐标修正的同时,自动装贴元件。
3.2.4 电路板搬运关系
搬运爪式的搬运装置
机器上的电路板搬运是通过电路板抓取单元 (搬运爪),在载入侧搬运轨道、贴装平台和
送出侧搬运轨道之间进行的。搬运爪可分为载入侧搬运爪与送出侧搬运爪 2 种。它们都是
根据贴装时的生产程序、用汽缸来驱动的。
载入侧搬运轨道: 将电路板搬送到机器内并由升降板将其抬高后,将电路板过渡到后
退过来的载入侧搬运爪。
载入侧搬运爪: 从载入侧搬运轨道将电路板抓取后搬运到贴装平台。
贴装平台: 将电路板固定后移动。
送出侧搬运爪: 将电路板从贴装平台上抓取后搬运到送出侧搬运轨道。
送出侧搬运轨道: 从送出侧搬运爪得到电路板后将电路板向机器外搬运。