JM-20使用说明书.pdf - 第451页
第 1 部 基本篇 第 4 章 制作生产程序 4- 83 4-3-5-2-5 贴片条件 贴片条件是关于 贴片的设置项目 , 由于应用默认值, 通常无需变 更。 如果在默认值的状 态下不能正常 贴片时,请变更 设置。 注意 如果在变更贴片 条件后变更了基本 部分的项目,贴片 条件 的值有可能恢复 为默认值。 (1) 贴片深度补偿 设置贴片时元件 按入基板表面的 深度的尺寸。 控制方式,要指 定使用行程或是 负荷进行控制 。 当设置为 “ …

第 1 部 基本篇 第 4 章 制作生产程序
4-82
设置为[是]时,将在进行跟踪吸取位置时执行自动示教。
(9) 卡盘吸嘴夹持力
选择卡盘吸嘴的夹持力。请从下拉清单中选择设置。
卡盘吸嘴夹持力的默认值为「强」。在生产动作中或测量元件时等夹持元件时,变更夹持力执行元
件的吸取/贴片动作。
(10) 检测到元件后的(吸取)等待时间
设定检测到元件后直至开始吸取的等待时间。
(由于震动式的供料器,在元件检测传感器从 OFF 变为 ON 的瞬间,元件有时尚未到达吸取位置)
本项目可在包装方式为「管状」或「INS 散装」时设定。
第 1 部 基本篇 第 4 章 制作生产程序
4-83
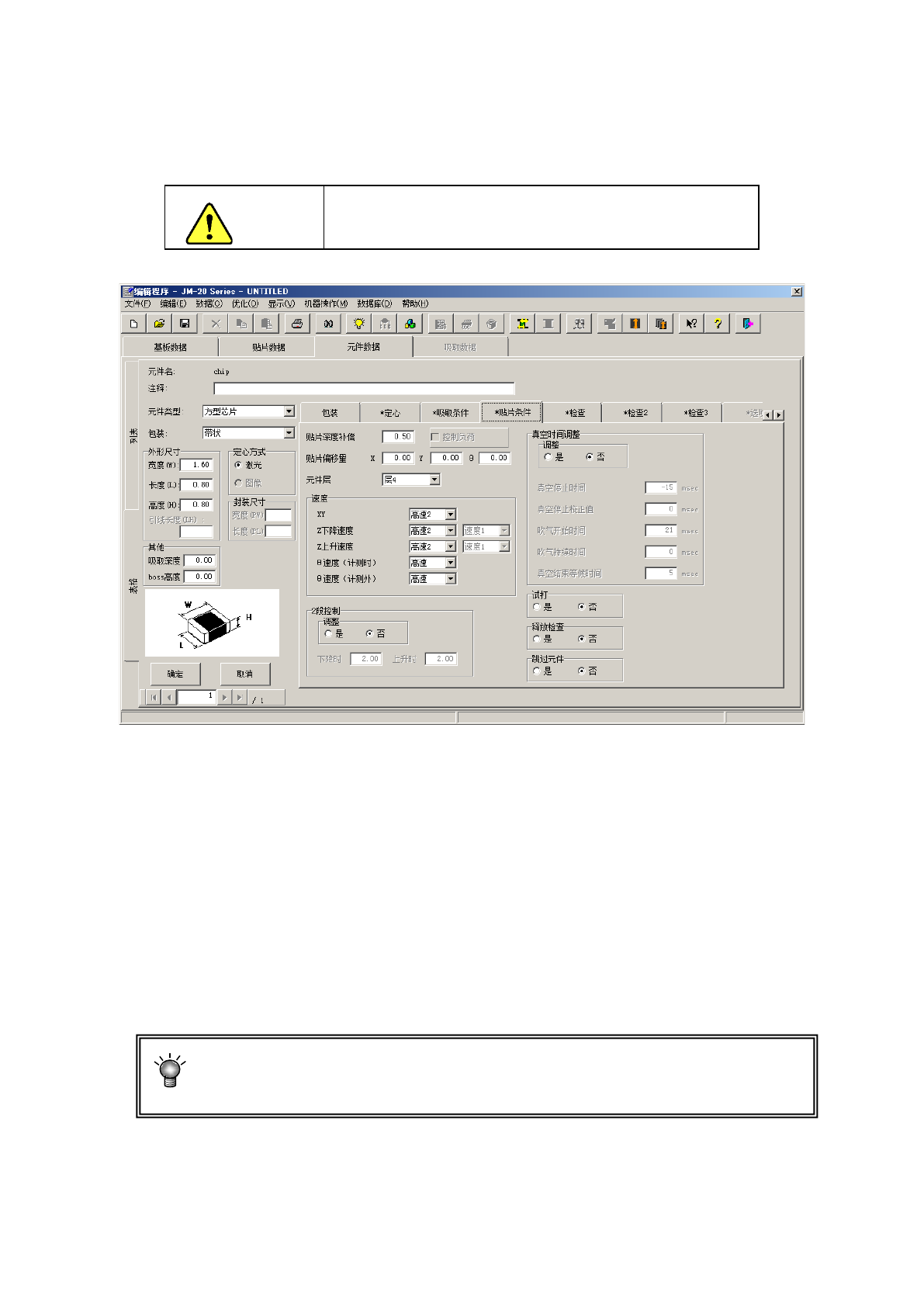
4-3-5-2-5 贴片条件
贴片条件是关于贴片的设置项目,由于应用默认值,通常无需变更。如果在默认值的状态下不能正常
贴片时,请变更设置。
注意
如果在变更贴片条件后变更了基本部分的项目,贴片条件
的值有可能恢复为默认值。
(1) 贴片深度补偿
设置贴片时元件按入基板表面的深度的尺寸。
控制方式,要指定使用行程或是负荷进行控制。
当设置为“0”时,因基板平面度不一,有时元件尚未接触基板即被贴装而造成贴片偏移,
或贴片时元件在乳状焊料上发生滑动等情况。
出现这种情况时,请增加元件到达基板前的深度补偿量(输入正值)。
初始值为“0.5mm”(0603、0402 芯片元件为 0.2mm)。
「控制负荷」按钮,在使用 601 以后的可简易负荷控制的吸嘴时,会变为有效。
详情请参见「第 13 章 选项元件」的「13-7 简易负荷控制」。
使用轴向供料器时,贴片深度补偿切勿输入正方向的值。
否则,供应机器与吸嘴有可能碰撞。
第 1 部 基本篇 第 4 章 制作生产程序
4-84
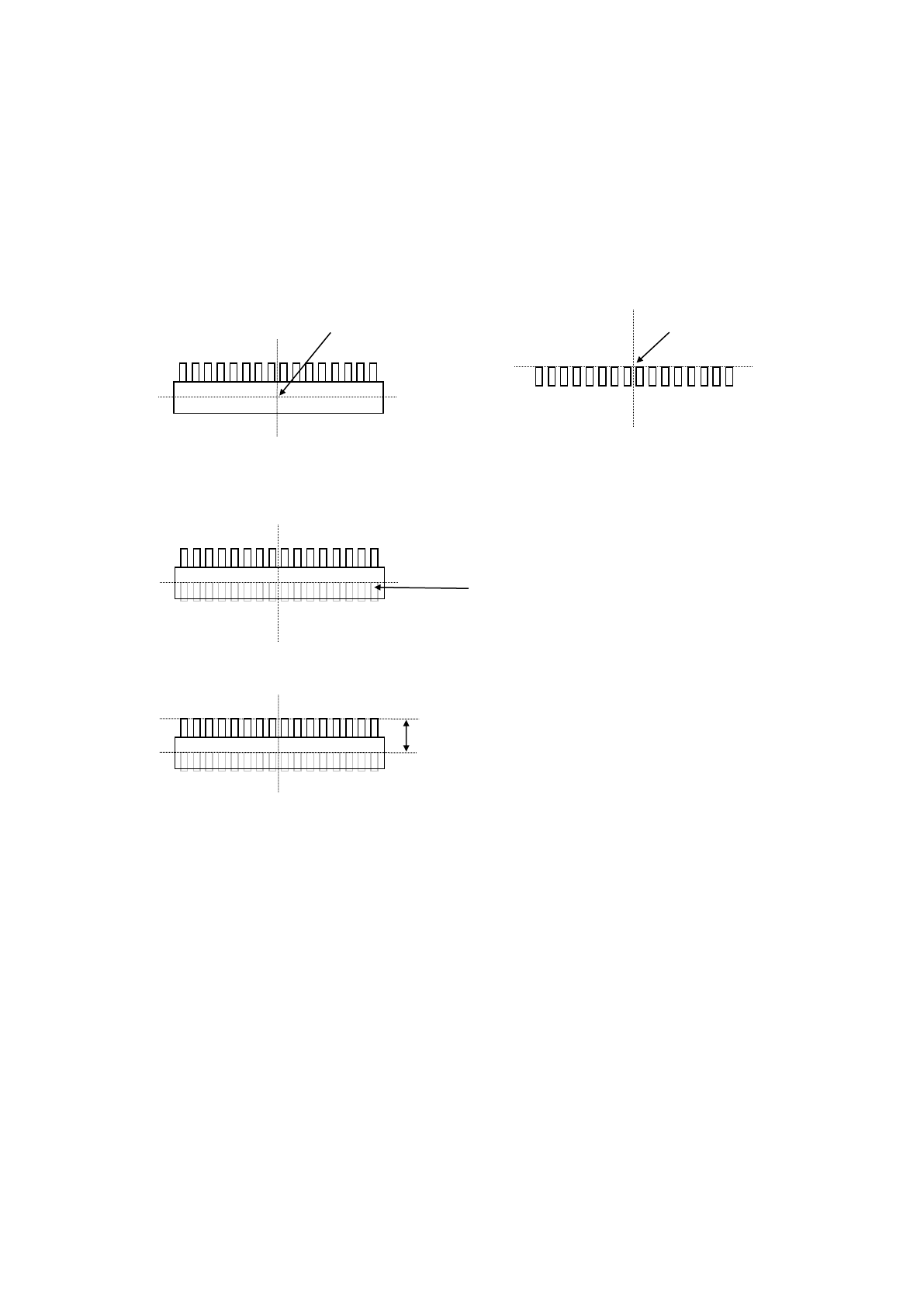
(2) 贴片偏移量XYθ
激光定心方式,是通过激光观察到的元件外形来捕捉元件的中心。
另一方面,CAD 数据等是以元件的实际贴片图形(称为焊盘,PAD)的中心为贴片坐标。
由于存在这种关系,元件的引脚部分与基板的垫片可能发生位置偏差。
把该差值作为贴片偏差输入后,可将元件贴到正确的位置。
(例1) 单向引脚连接器
※贴片角度为0度
激光定心的中心 贴片坐标点
从上面看元件时 基板上的 Pad 焊盘
如果不输入贴片偏移量而进行贴片,则会出现下述情况。
基板上的 Pad 焊盘
在上图的状态下(贴片角度0度,贴片偏移0),测量以贴片坐标点为起点到实际元件贴片坐标点位置的尺
寸,输入到贴片偏移值中。
执行上述步骤,输入贴片偏移值后,在贴装多个同名元件时,即使各贴片角度不是0度,也会自动变更
贴片位置,使元件被贴在正确的位置上。
贴片偏移
-Y(X 为 0)