JM-20使用说明书.pdf - 第485页
第 1 部 基本篇 第 4 章 制作生产程序 4- 11 7 5) 控制 对进行图像识别时要 使用的摄像机、照 明等进行设置。通 常设置为初始值, 因此无需进行变 更。设置的详细 情况请参见「 4- 3-5-2-9 控制」 。 ※ 引脚元件类型 的各输入设置范 围 元件种类 设置范围 引脚间距 m m 引脚长度 m m 引脚宽度 m m 引脚数 ( 个 ) 铝电解电容 — 0. 14 - 15 0. 12 -1.5 — SOP 0.2-…
第 1 部 基本篇 第 4 章 制作生产程序
4-116
3) 引脚方向
元件种类为单向引脚连接器时,设置有引脚的面是上还是下。
4) 识别引脚种类
对连接器元件,通常需要识别所有引脚,如只能识别两端的引脚,或两端有引脚以外的发光物
时,只能分别按:“仅对两端引脚”进行识别,或把发光物体假定为引脚,将两端引脚除外进行识
别。
项目
内容
所有引脚
将所有引脚作为识别对象。
仅对两端引脚
从引脚两端开始指定识别引脚的范围。
两端引脚除外 从引脚两端开始指定不识别引脚的范围。
指定为“仅识别两端引脚”、“两端引脚除外”时,要输入左上、右上、左下、右下的引脚根数,
指定识别范围。
元件种类 识别图案
引脚数输入范围
左上角 右上角 左下角 右下角
单向连接器
所有引脚
仅两端引脚
两端引脚除外
****
1-3
0-3
****
1-3
0-3
****
****
****
****
****
****
双向连接器
Z 引脚连接器
所有引脚
仅两端引脚
两端引脚除外
****
1-3
0-3
****
1-3
0-3
****
1-3
0-3
****
1-3
0-3
※引脚数在 2 根以下时有时识别精度会降低。
<引脚识别图案的含义及图形>
● 仅两端引脚:只识别指定的两端引脚根数
● 两端引脚除外:以指定的两端引脚根数以外的引脚为识别对象
※请在引脚数里输入作为识别对象的引脚数。(不包括被除外的引脚数)
● 识别所有引脚:所有引脚为识别对象
识别
识别
不识别内侧引脚
识别 识别
不识别外侧引脚
识别
识别
识别 识别
第 1 部 基本篇 第 4 章 制作生产程序
4-117
5) 控制
对进行图像识别时要使用的摄像机、照明等进行设置。通常设置为初始值,因此无需进行变
更。设置的详细情况请参见「4-3-5-2-9 控制」。
※引脚元件类型的各输入设置范围
元件种类
设置范围
引脚间距
m
m
引脚长度
m
m
引脚宽度
m
m
引脚数(个)
铝电解电容
—
0.14-15
0.12-1.5
—
SOP
0.2-2.54
0.14-3.0
—
7-255
HSOP
0.2-2.54
0.14-3.0
—
7-128
SOJ
0.3-2.54
0.14-3.0
—
7-128
QFP
0.2-2.54
0.14-3.0
—
7-255
GaAsFET
—
0.14-15.0
0.12-1.5
—
PLCC(QFJ)
0.3-2.54
0.14-3.0
—
7-128
PQFP(BQFP)
0.2-2.54
0.14-3.0
—
7-255
TSOP
0.2-2.54
0.14-3.0
—
7-255
TSOP2
0.2-2.54
0.14-3.0
—
7-255
QFN
0.2-5.0
0.2-3.0
0.12-3.0
1-255
单向引脚连接器
0.2-2.54
0.14-3.0
—
2-255
双向引脚连接器
0.2-2.54
0.14-3.0
—
2-255
Z
引脚连接器
0.2-2.54
0.14-3.0
—
2-255
扩展引脚连接器
0.2-2.54
0.14-3.0
0.12-2.2
2-255
J
引脚插座
0.3-2.54
0.14-3.0
—
7-128
鸥翼形插座
0.3-2.54
0.14-3.0
—
7-128
带减震器的插座
0.3-2.54
0.14-3.0
—
7-128
INS
电解电容
0.01-50.00
0.01-25.00
0.01-5.00
―
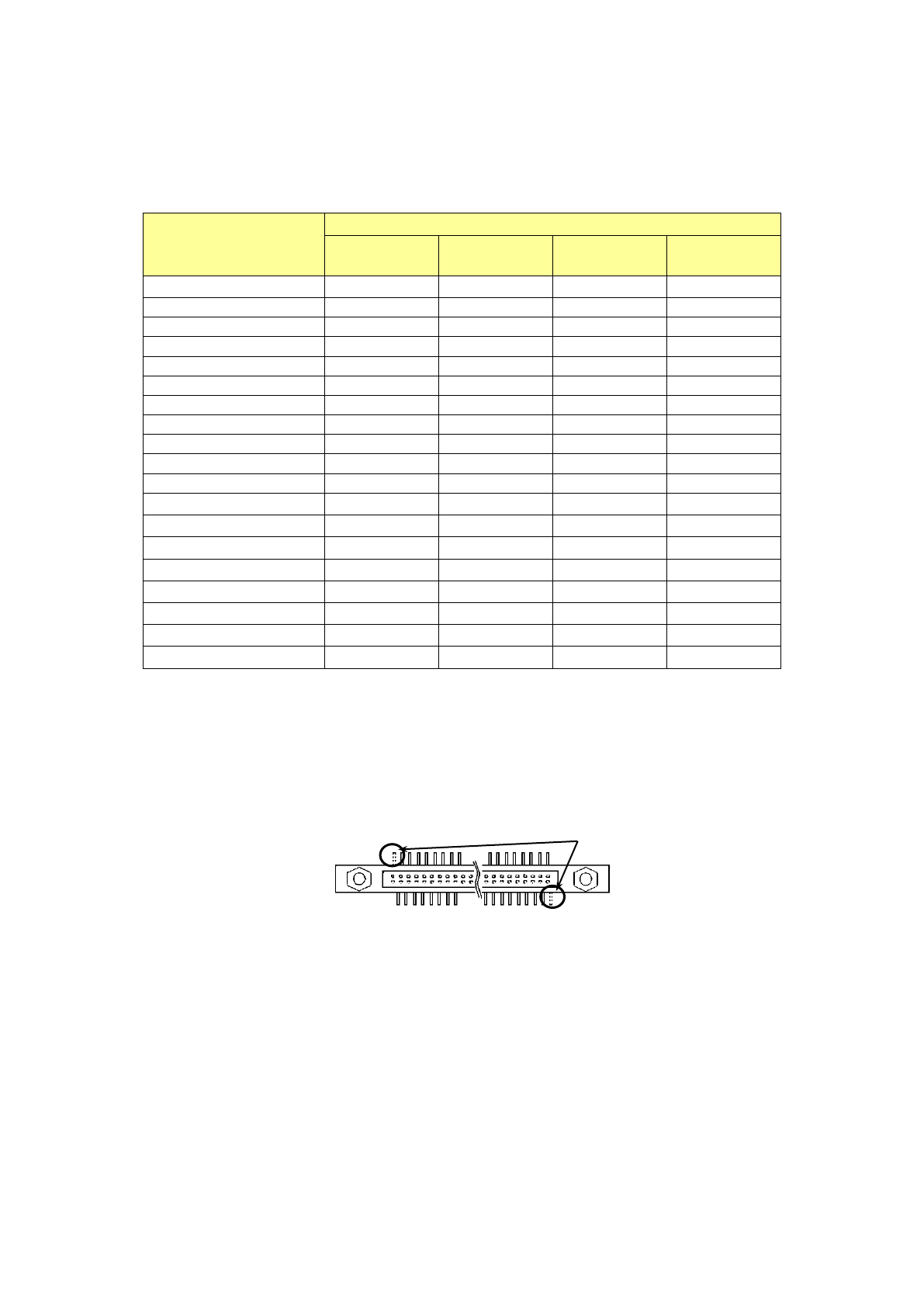
(注 1) 不足 0.4mm 的引脚间距需使用 27mm 视野摄像机。此外,不足 0.4mm 时的最大外形尺寸为
□24mm。
(注 2) Z 引脚连接器以下底边引脚在右侧有半间距弯曲(俯视图)为前提。
如果表面引脚向右位移,请在上边左侧与下边右侧各指定 1 根欠缺引脚。
(注 3) 连接器可设置的最少引脚根数为 2 根以上,但不足 4 根的引脚根数无法确保精度。
按 2 分割识别时,最少引脚数量为 14,3 分割识别时的最少引脚数量为 21。
(注 4) 关于 QFN 的引脚数
·4 边中至少要有 1 边的引脚数在 2 根以上,其他 3 边的引脚数在 1 根以上。
欠缺引脚
第 1 部 基本篇 第 4 章 制作生产程序
4-118
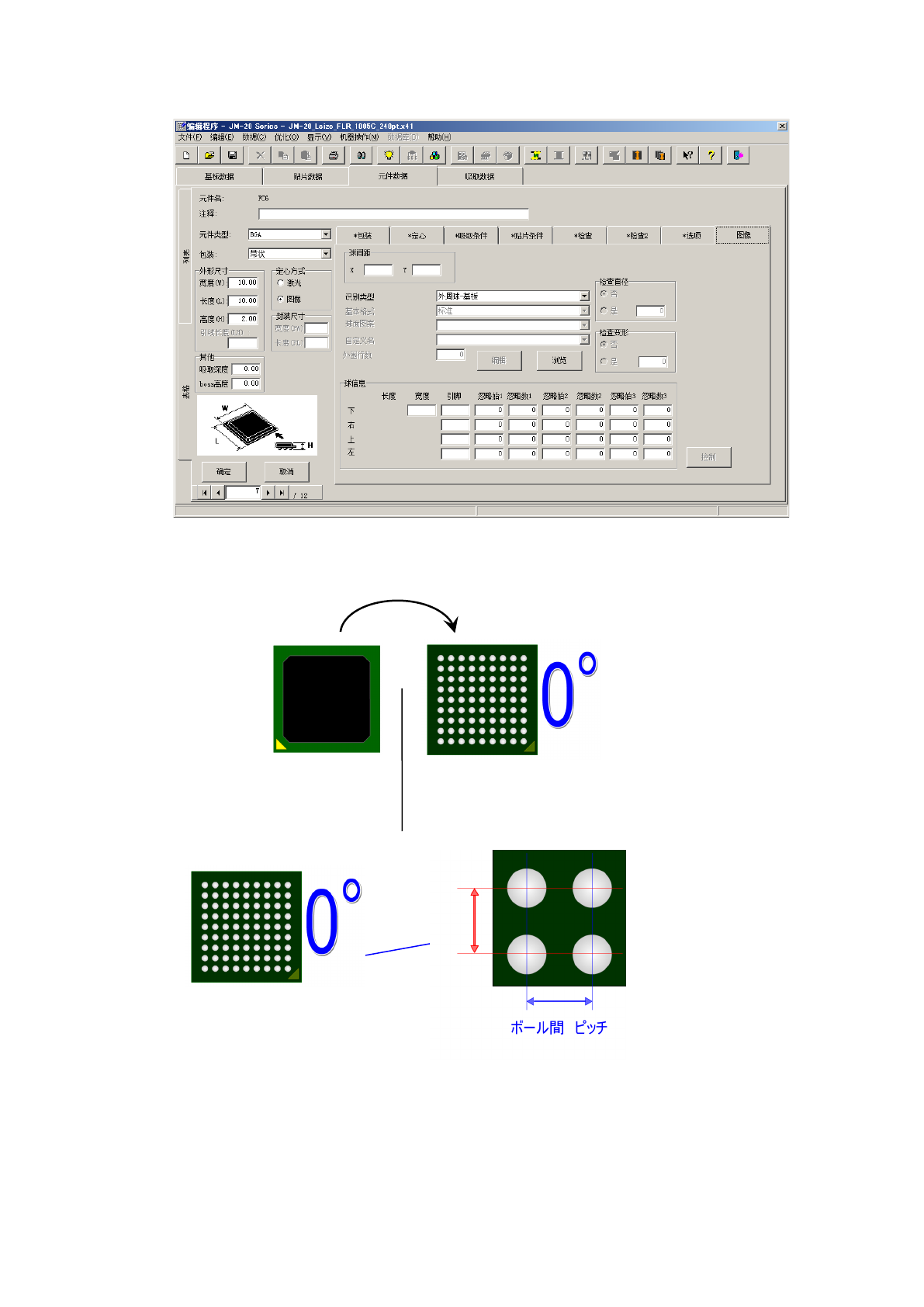
(2) 元件种类 球元件时
※球元件的图像数据时,要按元件的仰视图制作数据。
请按仰视图看到的球的各种信息进行设置。
1)
球间距
输入球之间的尺寸(X、Y)。
Y
俯视图 仰视图
球之间的间距
X