JM-20使用说明书.pdf - 第623页
第 1 部 基本篇 第 4 章 制作生产程序 4- 255 4-5-4-3 检查 图像识别检查, 可在实际元件上 安装 Head ,进行定心。 使用速度检查功 能,进行模拟生 产,检查在各 种运行中的 XY θ 偏差 值。 注意 为了避免人身伤害 ,在机器运行 过程中,切勿 将手和头伸入装 置内部。 4-5-4-3-1 图像识别检查 使用本功能,可 在实际元件上安 装 Head ,通过 图像识别,检查 能否进行元件 定中心。 识别检查的…

第 1 部 基本篇 第 4 章 制作生产程序
4-254
1) 状态
a) 跟踪模式
显示在输送方法中设置的「手动」或「自动」。
b) 电路范围
显示实施高度测量的电路的范围。
c) 贴片点范围
显示实施高度测量的贴片点的范围。
d) 跟踪状态
「动作中」表示轴正在移动中。
「暂停」表示在自动输送中的暂停。
「停止」表示手动输送或根据需要处于停止状态。
「轴待避中」表示轴正在移动到安全位置。
「标记识别中」表示正在识别 IC 标记。
e) 停止剩余时间
用进度条显示自动输送中的暂停剩余时间。
2) 贴片位置
a) 电路号
测量中的电路/电路总数
b) 贴片角度
测量中的元件贴片角度
c) 步骤数
测量中的贴片数据号
d) 贴片 ID
测量中的贴片 ID
e) 元件名
测量中的元件名
3) 贴片坐标设置
显示测量基板面高度的贴片点的贴片坐标。
4) 照明设置
对显示贴片点时使用的 OCC 照明进行选择。
5) 全体跟踪位置
对测量位置进行逐个推进。
在停止状态中,通过自由地移动滑动条,可向前返回,或前进到下一个。
第 1 部 基本篇 第 4 章 制作生产程序
4-255
4-5-4-3 检查
图像识别检查,可在实际元件上安装Head,进行定心。
使用速度检查功能,进行模拟生产,检查在各种运行中的XYθ偏差值。
注意
为了避免人身伤害,在机器运行过程中,切勿将手和头伸入装置内部。
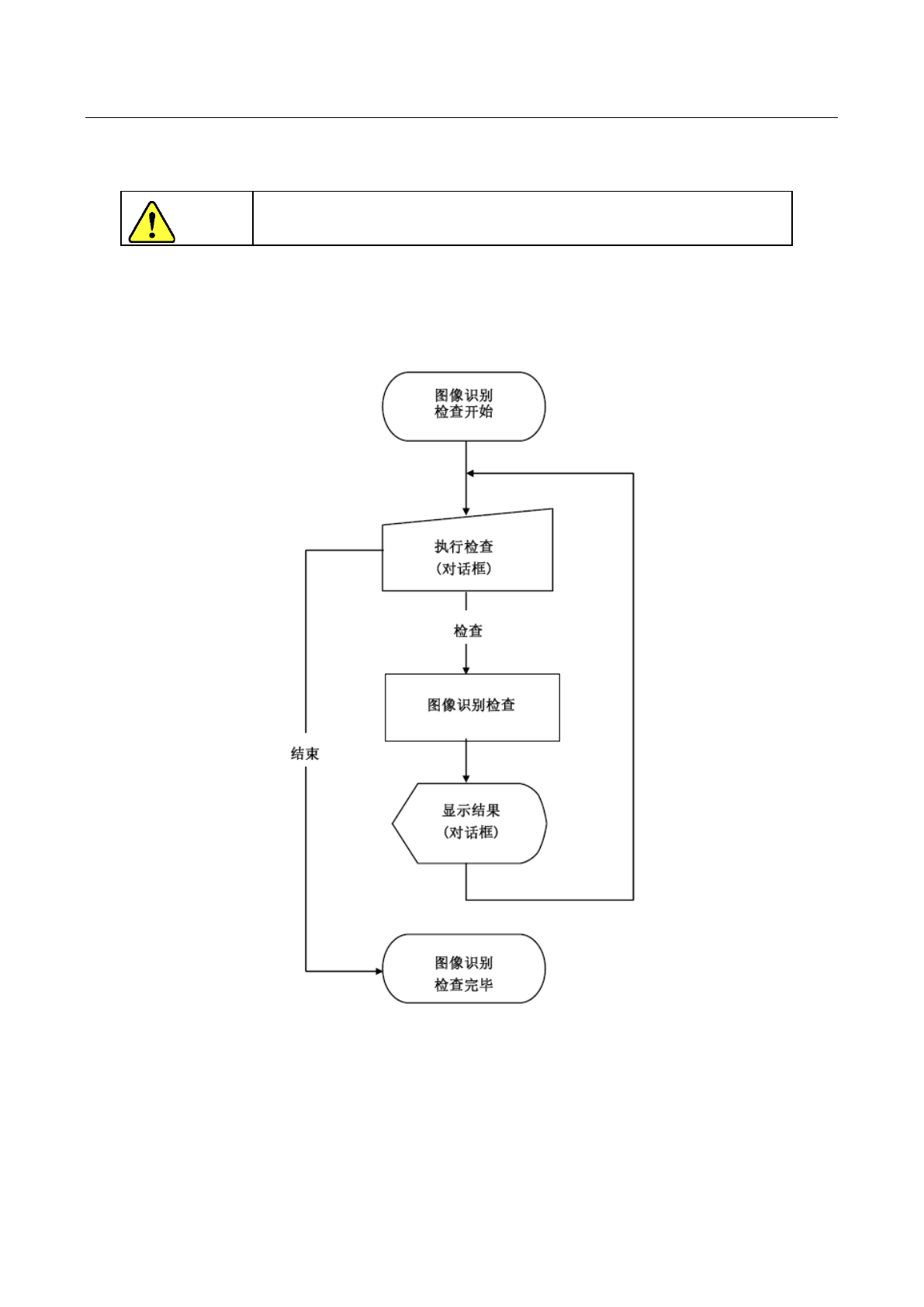
4-5-4-3-1 图像识别检查
使用本功能,可在实际元件上安装Head,通过图像识别,检查能否进行元件定中心。
识别检查的流程概要如下。
第 1 部 基本篇 第 4 章 制作生产程序
4-256
(1) 图像识别检查的检查方式
对元件数据中的设置值,进行图像定中心的一系列控制,检查有无错误。
(2) 关于图像识别检查时的各项运行
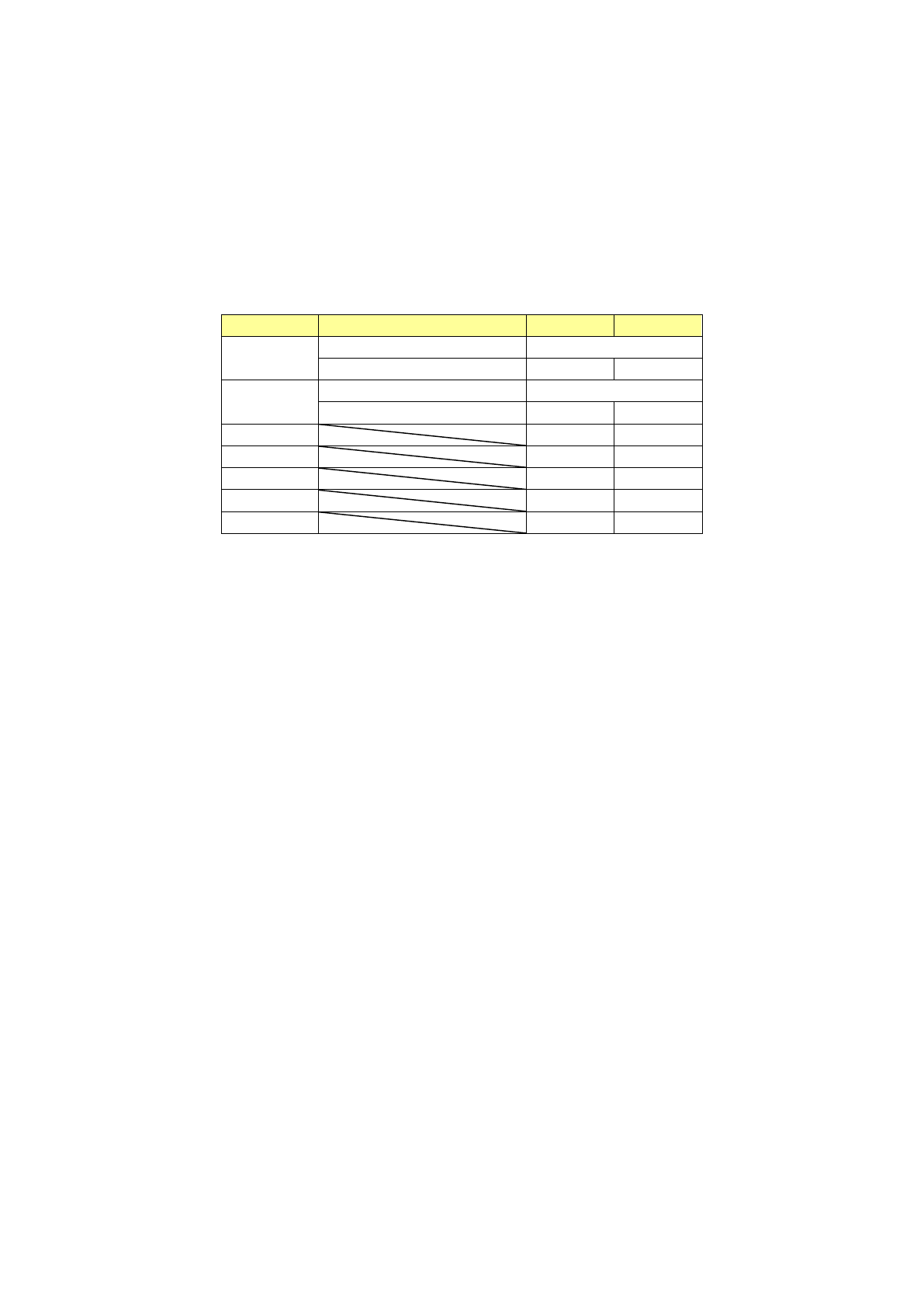
1) 检查后归还元件
检测后的元件有归还原来的位置或废弃两种处理。
因包装方式而异,详见下表。
废弃场所,在元件数据的「元件废弃」中设置指定。
1mm 以下的元件,在归还时可能出现元件直立或元件倒翻,请根据询问选择处理。
*1 将显示询问,请选择是归还或是废弃元件。连续检测时会在开始前进行询问。
2) 选择用于吸取的供给装置
若同一元件有多个供给装置(吸取数据)时,从最初输入数据初始值开始吸取元件。
也可根据需要,更换供给装置。
3) 改变吸取坐标
无法顺利吸取时,可手动输入或进行坐标示教改变吸取坐标。
4) 手动吸取
当没有吸取数据时,可手动将元件安装到吸嘴上。但在这种情况下,不能输入吸取坐标。也
不能操作供料器。
此外,手动吸取时,因元件尺寸的短边超过 50.0mm 的元件不能废弃,检测后必须把元件移
动到元件保护位置上。
包装方式
条 件
归还
废弃
带式
外形尺寸短边
1mm
以下
询问
*1
外形尺寸短边
1mm
以上
○ -
散装
外形尺寸短边
1mm
以下
询问
*1
外形尺寸短边
1mm
以上
○ -
托架
○ -
MTS
○ -
管状
- ○
INS
带状
- ○
INS
散装
- ○