HS50_advance_level 2.pdf - 第135页
Stud ent Gu ide HS-5 0 Adva nced II 07/2 002 Ed ition 6 Control & Co mmunicatio n 5 &RQWURO &RPPXQLFDWLRQ &RQWURO 6 WU XFWXU H The con trol str uctu re is ma inly based on three sections : – The…

1 - 4
Contents Student Guide HS-50 Advanced II
07/2002 Edition
4
Student Guide HS-50 Advanced II 07/2002 Edition
6 Control & Communication
5
&RQWURO&RPPXQLFDWLRQ
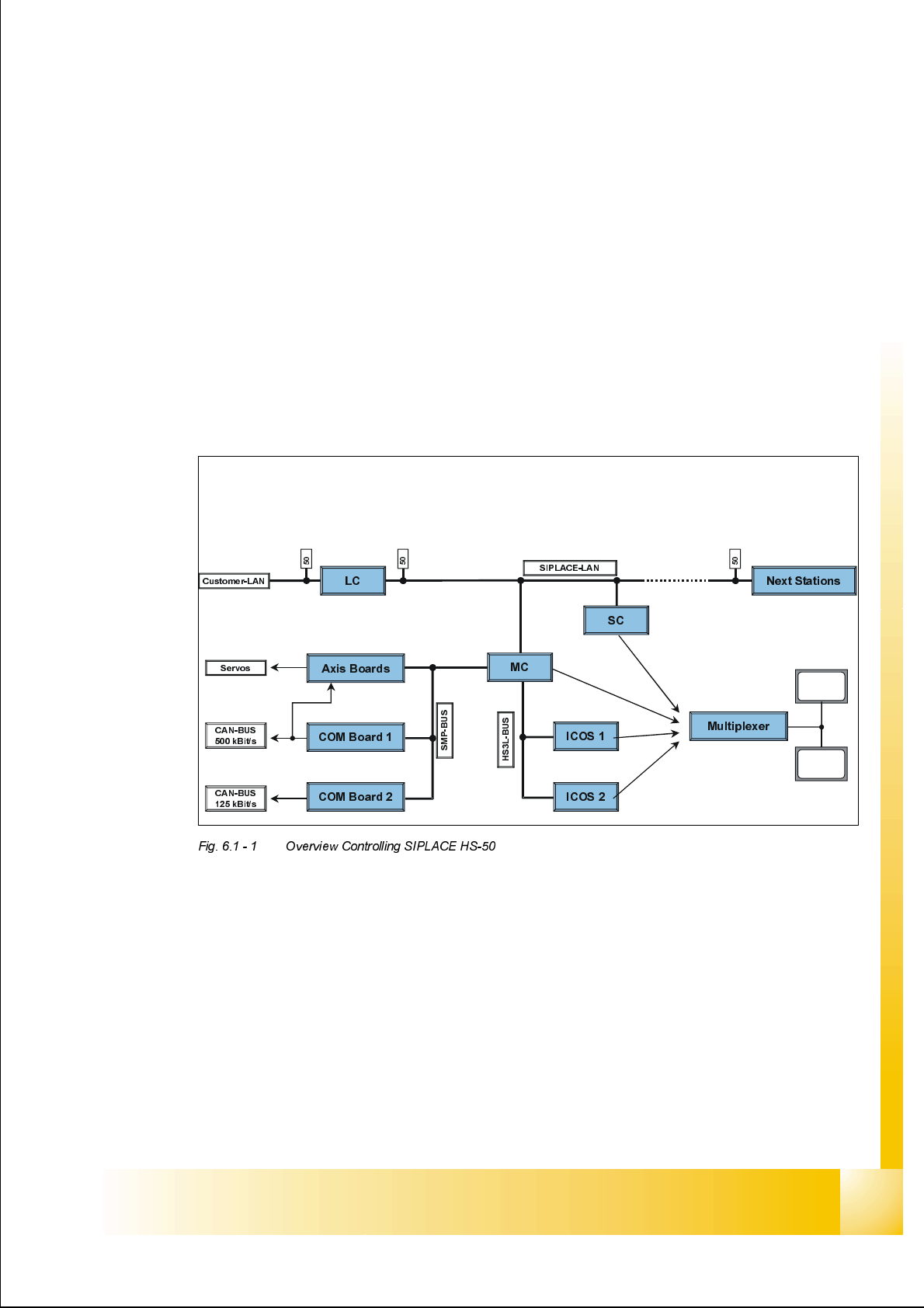
&RQWURO6WUXFWXUH
The control structure is mainly based on three sections:
– The SIPLACE-LAN being the interconnection between line computer and every single station
computer and machine controller of the whole line.
– The axis controlling responsible for any axis movement and input / output function in the ma-
chine.
– The vision system measuring the components and fiducials below the cameras.
!9LVLRQ6\VWHP
!$[LV&RQWUROOLQJ
!/$16WUXFWXUH
Ω
Ω
Ω
07/2002 Edition Student Guide HS-50 Advanced II
6 Control & Communication
6
&$1%XV
+LVWRU\RIWKH&$1%XV
The &$1 or &ontroller $rea 1etwork is an advanced serial bus system that efficiently supports
distributed control systems. It was initially developed for the use in motor vehicles by Robert
Bosch GmbH, Germany, in the late 1980s, who hold the CAN license. CAN is most widely used
in the automotive and industrial market segments. Typical applications for CAN are motor vehi-
cles, utility vehicles, and industrial automation. Other applications for CAN are trains, medical
equipment, building automation, household appliances, and office automation.
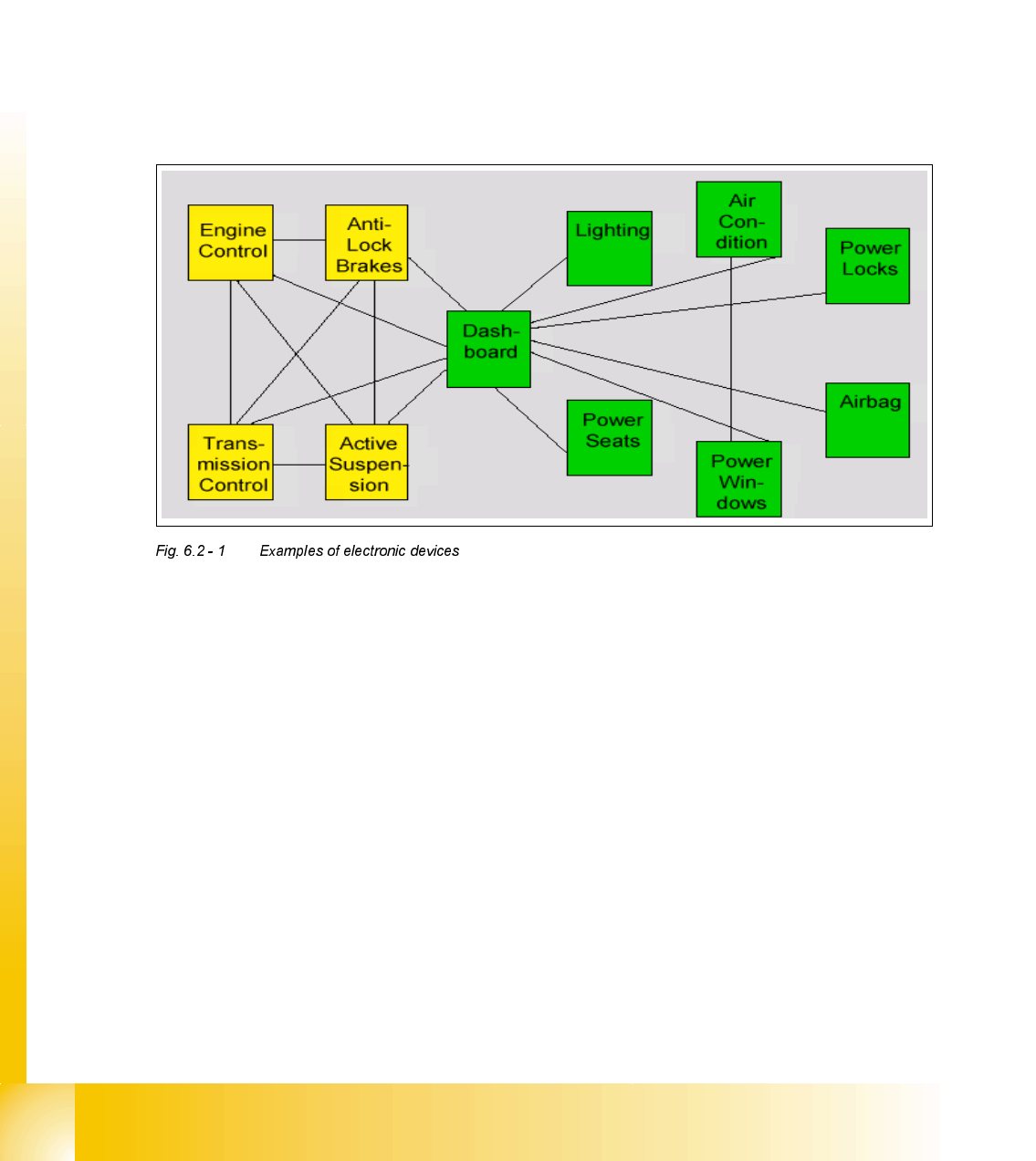
The development of CAN began when more and more electronic devices were implemented into
modern motor vehicles. Examples of such devices include engine management systems, active
suspension, ABS, gear control, lighting control, air conditioning, airbags and central locking. All
this means more safety and more comfort for the driver and of course a reduction of fuel consump-
tion and exhaust emissions.