HS50_advance_level 2.pdf - 第359页
S tudent Guide HS-50 Adva nced II Editio n 07/200 2 12 S pecial handlin g for th e Z-axis 15 &RQW DFW OHVVSLFNXSLQPRGH 6LJ QDOVIURP WRSWR ERWWRP Positio nal de viation: 2 V 2 0 ms Forc…
Student Guide HS-50 Advanced II
12 Special handling for the Z-axis Edition 07/2002
14
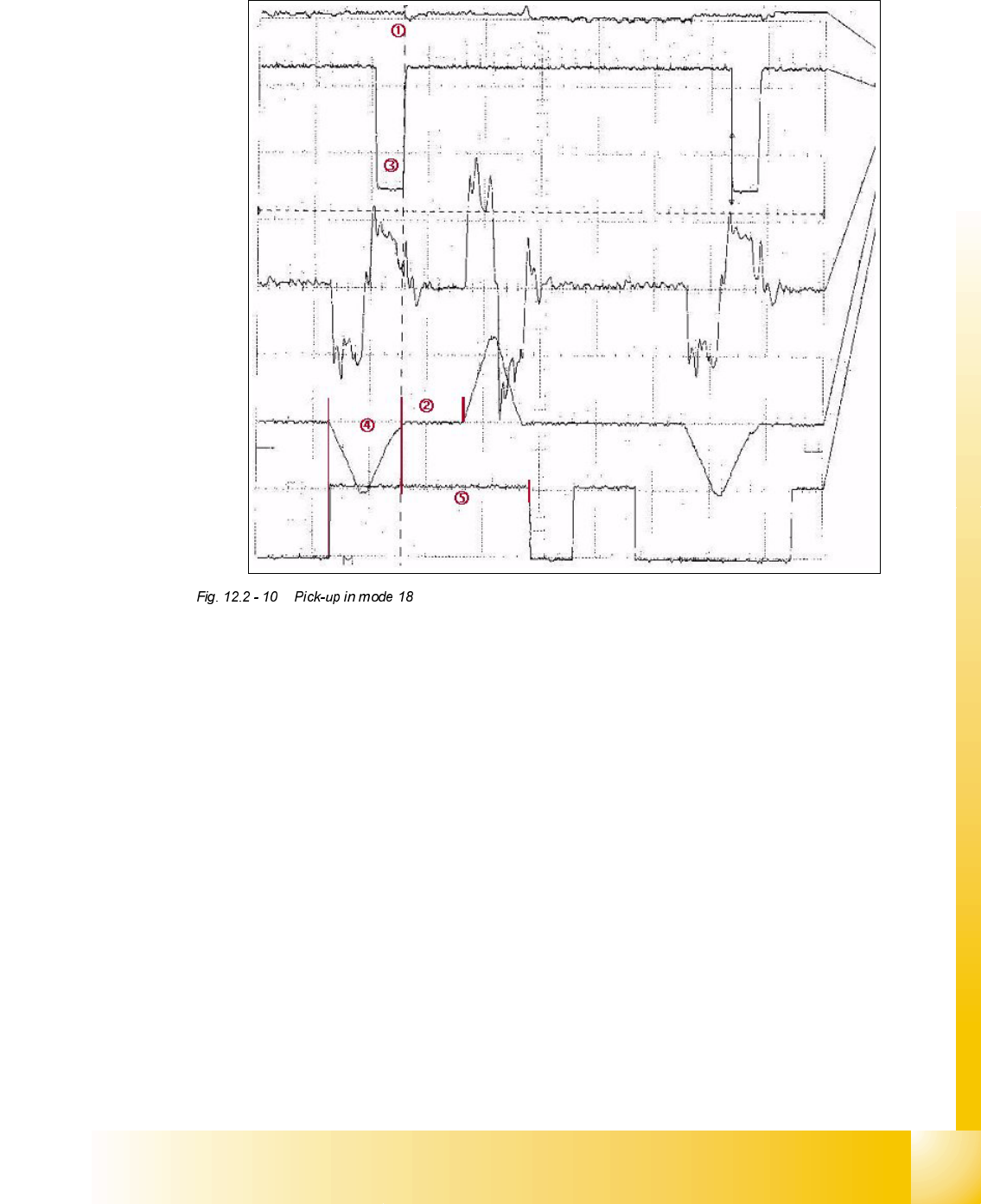
3LFNXSLQPRGH&RQWDFWOHVVDQGPRGH&DOLEUDWHSLFNXSKHLJKW
6LJQDOVIURPWRSWRERWWRP
Positional deviation: 2 V 20 ms
Force signal: 5 V 20 ms
Iactual: 5 V 20 ms
Vtarget: 5 V 20 ms
Calibrate the end signal from the oscilloscope memory
"Contactless" mode 17 was used for pick-up here.
With the "Pick-up without contact" option activated, the height was calibrated during the first pick-
up operation
by pressing the component onto the PCB using force level 5 (end signal delayed).
The sleeve spring was complete compressed,
this results in a positional deviation of about 55 digits after the
bottom light barrier has responded.
"Contactless" mode 17 is selected for picking up 0201 package forms (0.5 x 0.25 mm) so that they
can be securely picked up from the feeder (you can try to place package forms up to 0603).
In this mode the Z-axis is positioned at the absolute pick-up height (= calibrated height - 55 digits).
After 4 pick-up errors the pick-up height is recalibrated just like during the first pick-up operation
with the "Pick-up without contact" option activated. Mode 18 "Calibrate pick-up height" cannot be
programmed on the LC.
Student Guide HS-50 Advanced II
Edition 07/2002 12 Special handling for the Z-axis
15
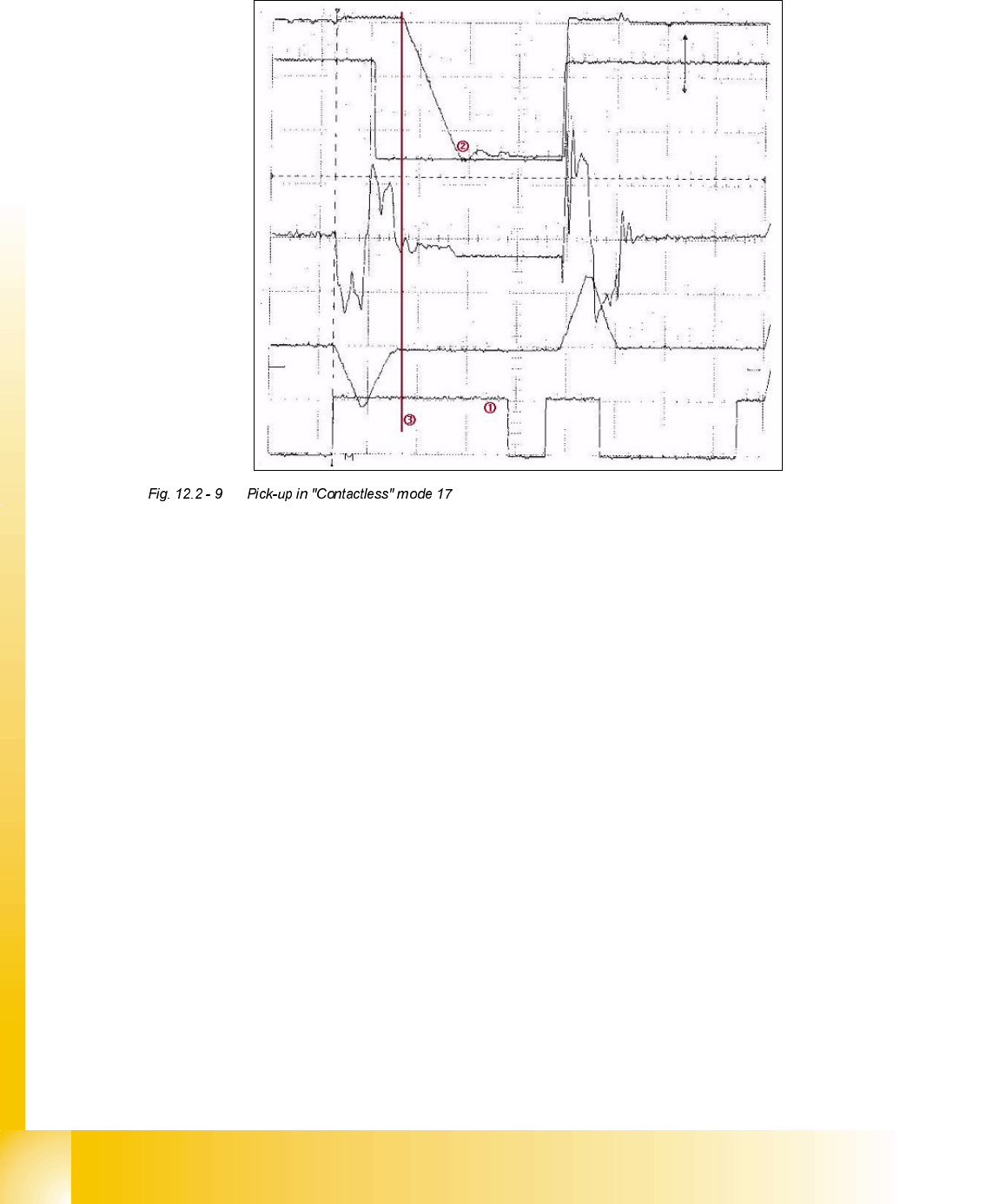
&RQWDFWOHVVSLFNXSLQPRGH
6LJQDOVIURPWRSWRERWWRP
Positional deviation: 2 V 20 ms
Force signal: 5 V 20 ms
Iactual: 5 V 20 ms
Vtarget: 5 V 20 ms
Calibrate the end signal from the oscilloscope memory.
With the "Pick-up without contact" option activated, the component was picked up at the calibrated
pick-up height.
Absolute positioning: The counting of the positional deviation below is not started.
The time spent over the component is the result of switching on the vacuum.
The force is only reduced during the braking phase.
The downward positioning operation takes about 25 ms
instead of 60 ms when calibrating.
Student Guide HS-50 Advanced II
12 Special handling for the Z-axis Edition 07/2002
16
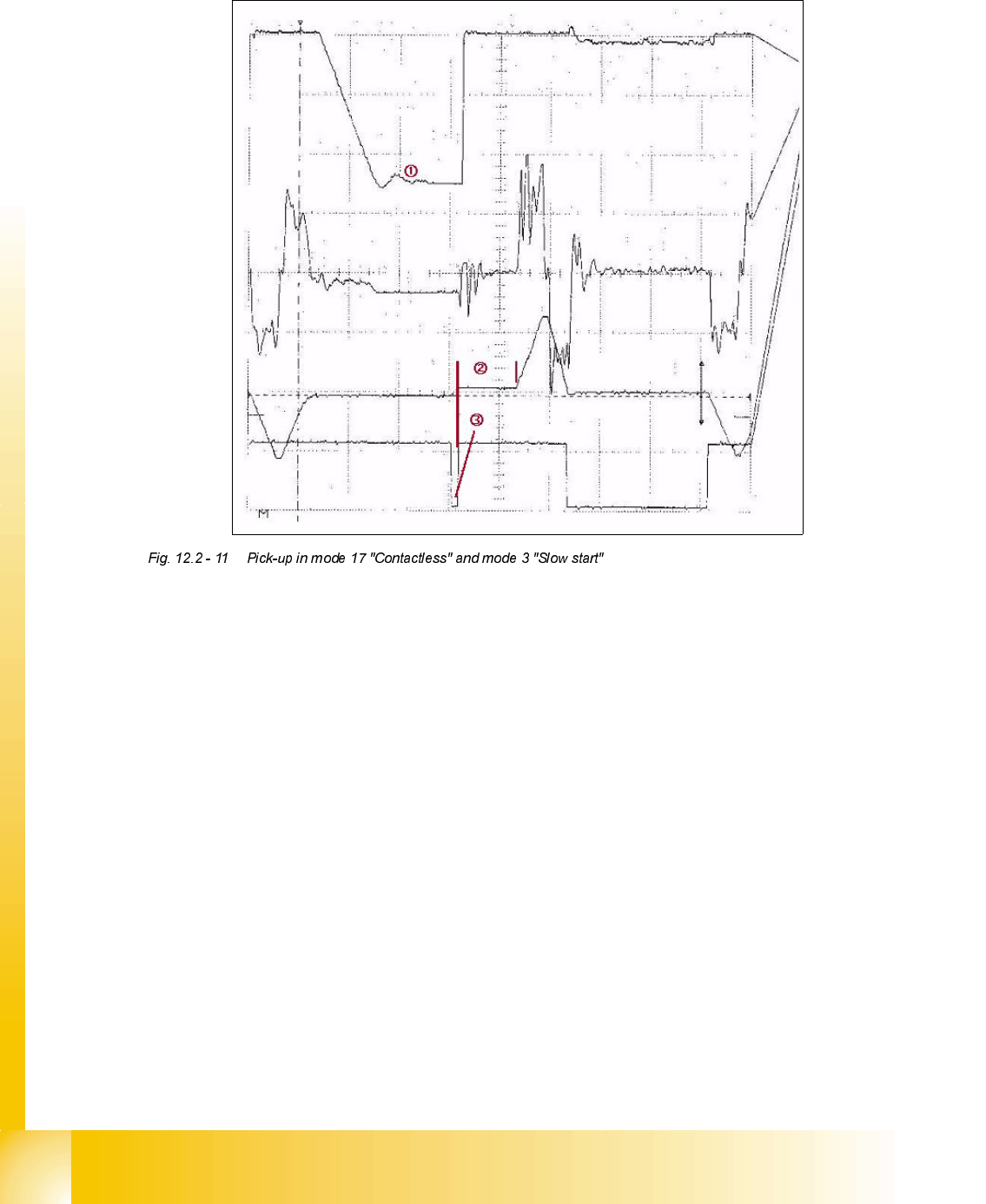
&RQWDFWOHVVFDOLEUDWLRQDQGSLFNXSLQPRGH6ORZVWDUW
6LJQDOVIURPWRSWRERWWRP
Positional deviation: 200 mV 20 ms
Force signal: 5 V 20 ms
Iactual: 5 V 20 ms
Vtarget: 5 V 20 ms
End signal: 5 V 20 ms
"Contactless" mode 17 was used for pick-up here.
With the "Pick-up without contact" option activated, the height was calibrated during the first pick-
up operation
by pressing the component onto the PCB using force level 5 (about 55 digits).
Travel started at start speed for 44 digit path.
You can tell that the vacuum has been switched on when the light barrier is at the top due to
the wait time of about 2 ms on the component.
Combination for package forms that are to be picked up without contact, but that may fall off when
accelerating upwards due to their weight. The parameters do NOT affect each other. Can also be
combined with the "Early vacuum" option.