HS50_advance_level 2.pdf - 第142页
07/2002 Editio n Student G uide HS -50 Advanc ed II 6 Cont rol & C ommun icatio n 12 %DVLFFRP SRQHQWVRI DQ$ &D[LV A axis controll er , a servo am plifi er and a a xis drive g enerate al l movem ents in t…
Student Guide HS-50 Advanced II 07/2002 Edition
6 Control & Communication
11
$[LV&RQWURO
%DVLFFRPSRQHQWVRID'&D[LV
A axis controller a servo amplifier and a axis drive generate all movements in the machine.
In the HS-50 machine the DC drive system is used for the Z-and DP-axis.
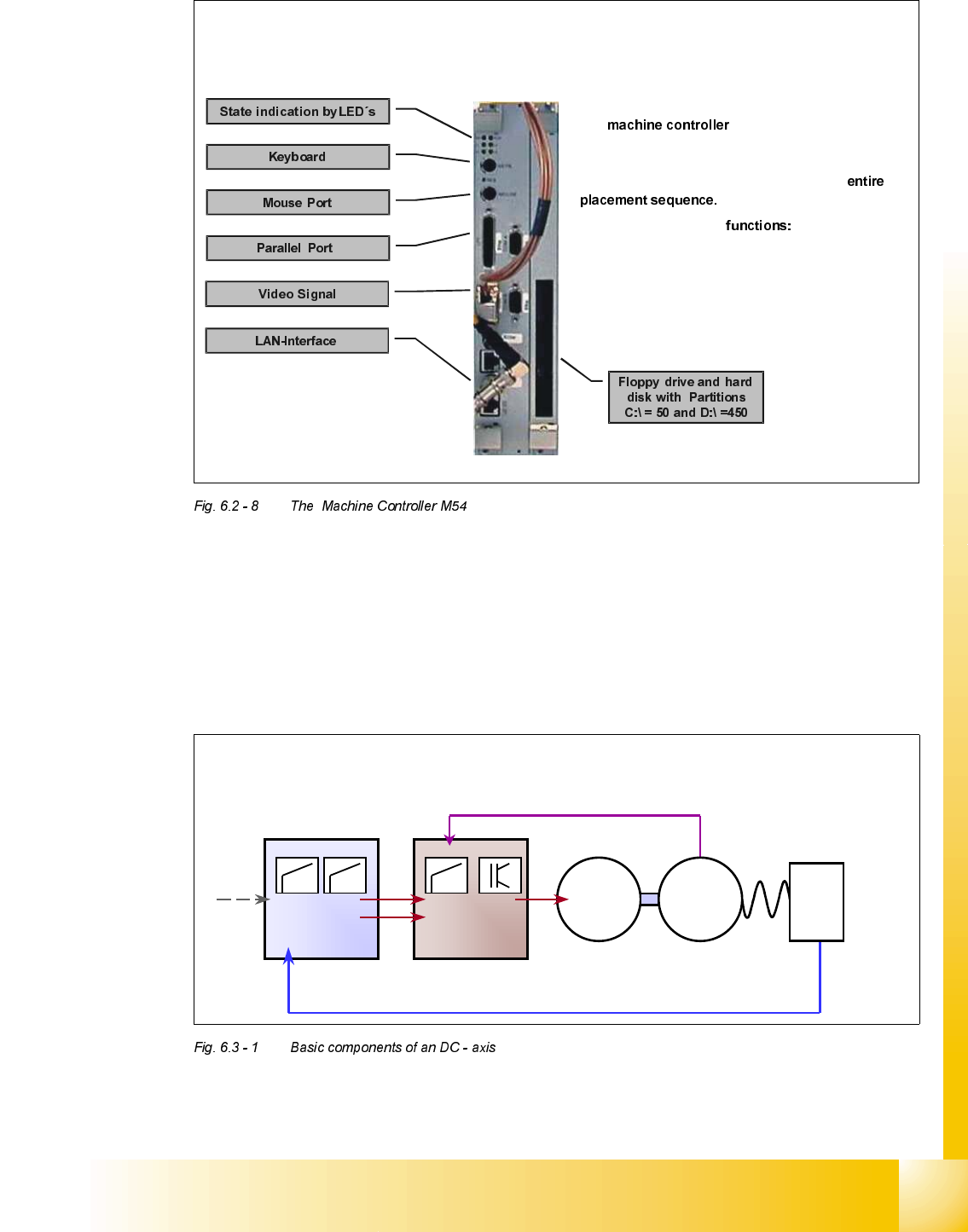
! 7KH0DFKLQH&RQWUROOHU0
The is an industrial PC running
RMOS, a real-time operating system based on DOS.
In conjunction with the axis control cards, the CAN
cards and the vision systems, it controls the
It provides the following
– Control of all axis sequences
– Control of the vision systems
– Monitoring of all input and output functions
– Implementation of all operator input
Digital axis
controller
Analog servo
amplifier
Axis drive
Analog speed
detection and
feedback loop
Digital position
detection with
feed back loop
M
=
G
=
Tracksignals
Incremental
encoder
07/2002 Edition Student Guide HS-50 Advanced II
6 Control & Communication
12
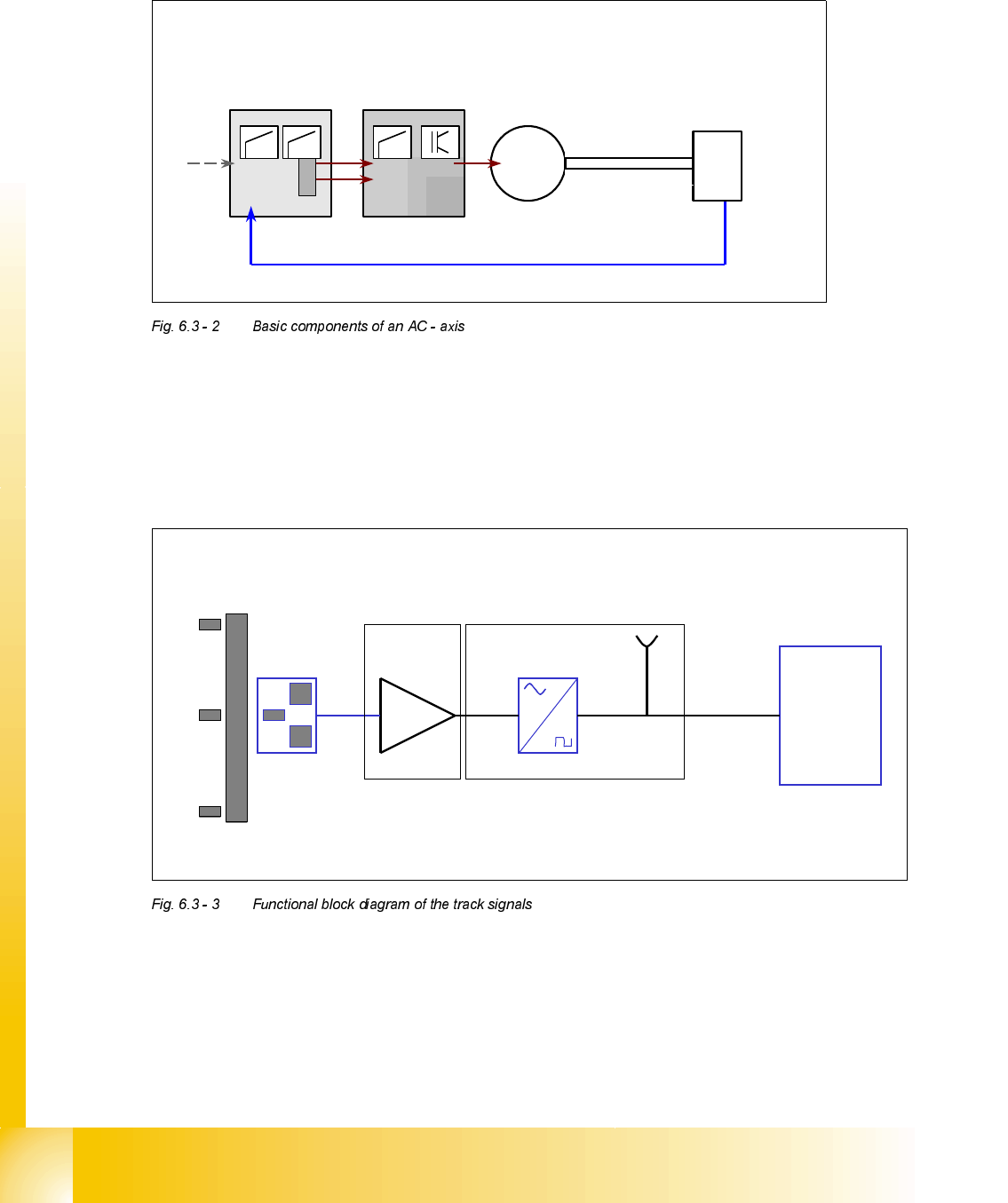
%DVLFFRPSRQHQWVRIDQ$&D[LV
A axis controller, a servo amplifier and a axis drive generate all movements in the machine.
The X-, Y-, and the star axis in the HS-50 machine are based on the 3 phase AC principle.
7UDFN6LJQDO3ULQFLSOHV
)XQFWLRQDOEORFNGLDJUDPRIWKHWUDFNVLJQDOV
Digital axis
controller with
additional VC-
controller
Analog servo
amplifier
Axis drive
digital position
detection with
feed back loop
Tracksignals
M
3~
Tracksignals
Incremental
encoder
Encoder
analogue
output
signal
Amplifier with Offset.
Signal multiplication
and digitizing
Track signals A and B and
their inverted signals
Axes controller
Linear or
Rotor scale
Student Guide HS-50 Advanced II 07/2002 Edition
6 Control & Communication
13
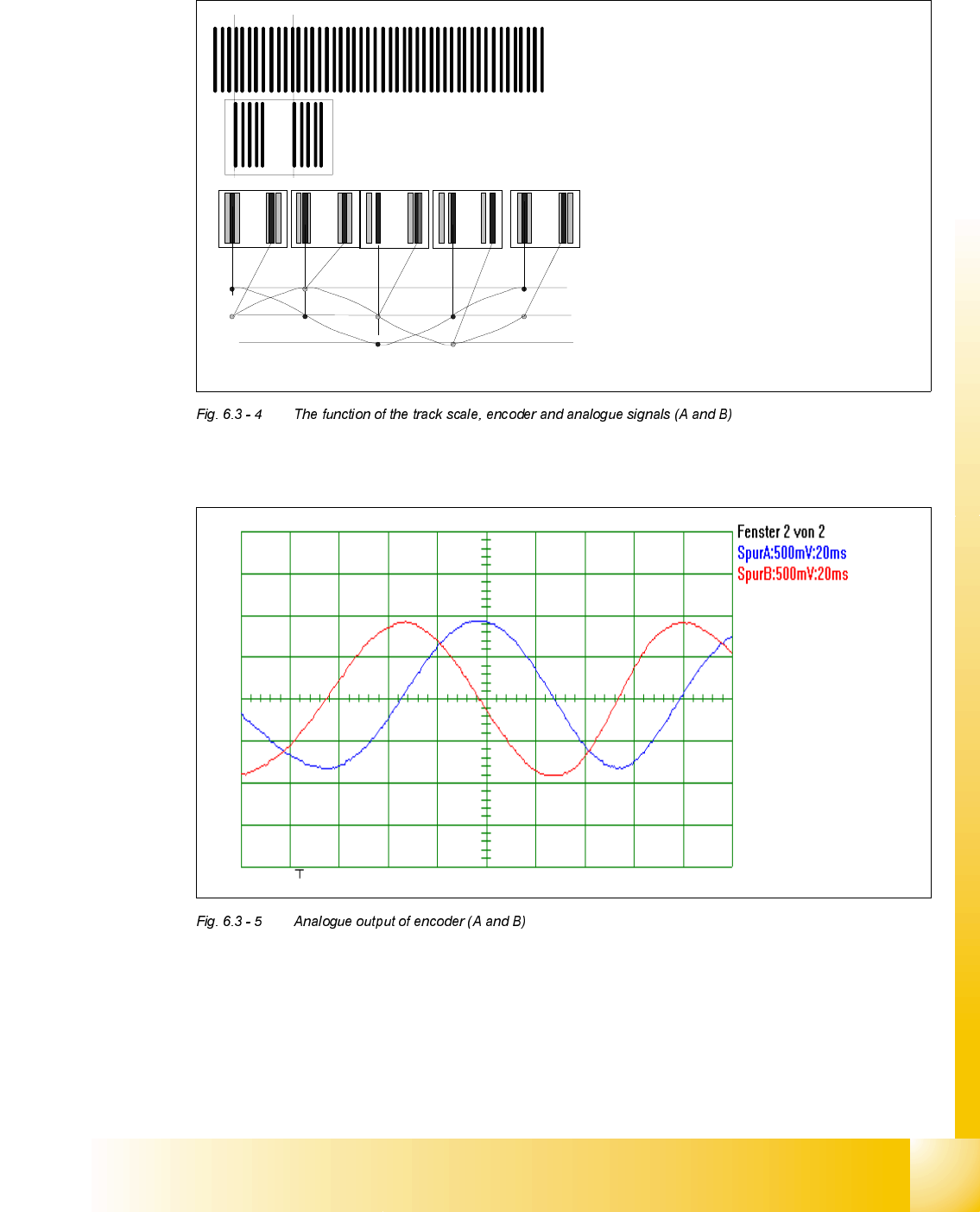
7KHIXQFWLRQRIWKHWUDFNVFDOHHQFRGHUDQGDQDORJXHVLJQDOV$DQG%
$QDORJXHRXWSXWRIHQFRGHU$DQG%
As described on the previous page the encoder produces 2 track signals (A and B) that
are phase shifted by 90 degrees. Here we see Track A leading Track B indicating the
axis is moving to the right.
Track scale
Encoder with scale for track A and B
Track A and B measure the same
scale but the encoder scale is shifted
by the half of bright or dark distance.
This makes a 90 degree signal shift.
If the encoder moves to the right track
signal A is the leading signal before
track signal B. If the encoder moves to
the left the reverse happens.