NXTII 机械手册.pdf - 第421页
QD145-04 9. 测定和调整 NXT Ⅱ机械手册 399 解除 PA M 测定模式时, 请选择 「远程 操作」- 「机上 PAM」- 「解除 PAM 模 式」 。选择 「开 始」- 「返回」时,模组返回通常的运转画 面。此外,根据 PAM 测定模式 的设定、恢复生产 等,从机器上删除 Job。 9.1.9 测定方法 请按以下步骤进行测定。此外, 在支撑板上安装了支撑销的时候, 请事前将其除去。 注意 )在安放支撑销的状态下进行测定…

9. 测定和调整 QD145-04
398 NXT Ⅱ机械手册
9.1.8 PAM 测定模式设定
在机上 PAM 时,有以下 2 个模式,请选择符合目的的模式。
a. 测定贴装精度后进行初始修正值算出、反映的 「PAM 模式」。
b. 仅仅进行贴装精度的确认的 「贴装精度确认模式」(V5.11 开始对应)。
备注 )关于在此说明的附加软件的操作方法,请参考 「NXT 附加软件操作手册」(在线手册)
的 「机上 PAM 测定」一项。
PAM 测定模式的设定前的确认
在设定 PAM 测定模式前,请确认以下事项。
a. 在通常模式的状态下,生产 Job 已经传送到机器上。
b. 工作头的吸嘴全部返还到吸嘴置放台上。如果没有返还的话,请用吸嘴置放台更换指
令执行此项。
c. 在支撑板上没有安装支撑销。
d. 附件软件机器设定画面的 「机器功能设定」- 「电路板搬运设定」的 「最大电路板指
定」在通道 1、通道 2 上都设定为 「50mm-280mm」。
设定方法
1. 在附加软件的机器设定画面上,选择执行 PAM 的模组,单击 「远程操作」。
2. 请选择 「PAM 模式设定」。
3. 请选择 「PAM 模式设定」,「精度确认模式设定」中的某一个。
4. 请选择 「开始」,模式设定结束后,所选择的模式的操作画面变为 PAM 模式。
备注 )PAM 模式上等待 Job 画面的背景色变为褐色。
01MEC-0638E
01MEC-0639E
QD145-04 9. 测定和调整
NXT Ⅱ机械手册 399
解除 PAM 测定模式时,请选择 「远程操作」- 「机上 PAM」- 「解除 PAM 模式」。选择 「开
始」- 「返回」时,模组返回通常的运转画面。此外,根据 PAM 测定模式的设定、恢复生产
等,从机器上删除 Job。
9.1.9 测定方法
请按以下步骤进行测定。此外,在支撑板上安装了支撑销的时候,请事前将其除去。
注意 )在安放支撑销的状态下进行测定时,会与治具干涉。
1. 请从 Fuji Flexa 传输 PAM 用的 Job。「精度确认模式」的时候,在传送的 Job 名前显示
为 [CHECK]。
2. 请将供料器用 Job 安装在设定的料站上。
a. 测定 H08、H12(S) 或者 H12HS 贴装头时,请将安装有 1005 白色元件的供料器用 Job
安装到设定的料站上,按下前面盖罩的设定按钮。
b. 在单·双搬运轨道搭载机上测定 H01,H02 或者 G04 贴装头时,请安装送料间距 4mm
的 12mm 宽的空供料器,按下前面盖罩的设定按钮。
χ. 如果在三搬运轨道搭载机上测定 H01,H02,H04,G04 或者 OF 贴装头时,请设置在
Job 上设定了料盘供料器 M 类型的料站,按下前盖板的设置按键。
d. 测定的模组带有料盘 -L/LT 时,不需要此操作。
3. 请按下在基座上的全部模组的 START 按键。与通常的运转一样,NXT-2 机器以精度校正为
主,与治具板的宽度相吻合,变更搬运轨道的宽度。
备注 )因为有必要变更在基座的全部模组上的搬运轨道宽度,所以对于全部的模组有必要重
新开始生产。
4. 结束精度校正后,处于电路板等待状态。为了安装准备的治具板,请按下全部模组的
CYCLE STOP 按钮。
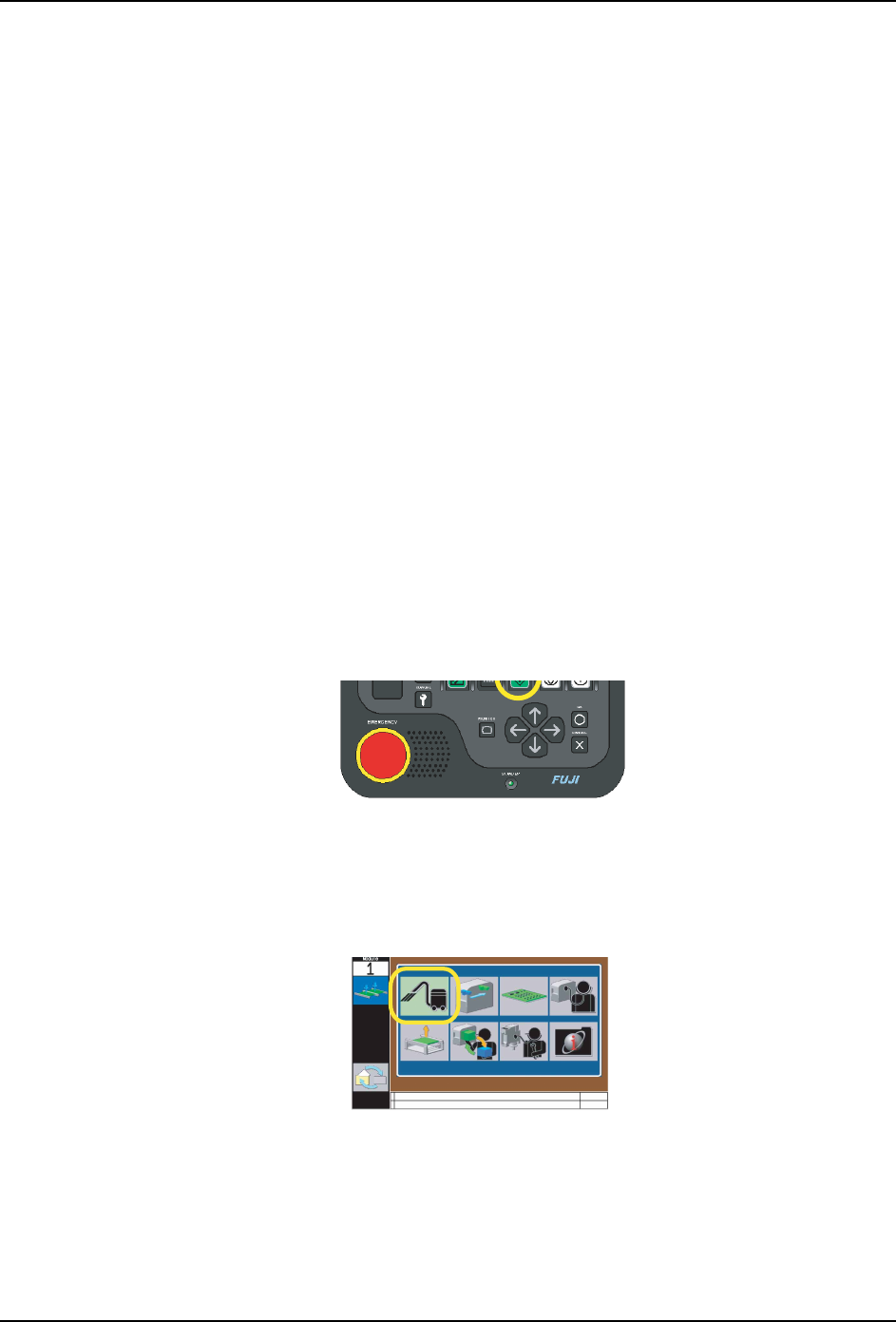
5. 按下执行 PAM 的模组的 MANUAL 按钮,显示出手动操作指令。
6. 请使用箭头键选择清扫指令,按下 OK 按键。夹紧模组后向前方移动一些。
7. 确认周围的安全,握住模组的手柄,解除刹车。请按原样慢慢地向前方拉出。
8. 请将准备的治具平板 ( 单·双搬运轨道搭载机 ) 或者玻璃电路板 ( 三搬运轨道搭载机 )
安装在通道 1 上,测定 H01,H02,H04,G04,OF 贴装头精度时,将玻璃元件安装在准备
好的治具上。
9. 握住模组的手柄解除制动。请保持原样慢慢地将模组插入到后方。
NXTOPE139
01MEC-0007
9. 测定和调整 QD145-04
400 NXT Ⅱ机械手册
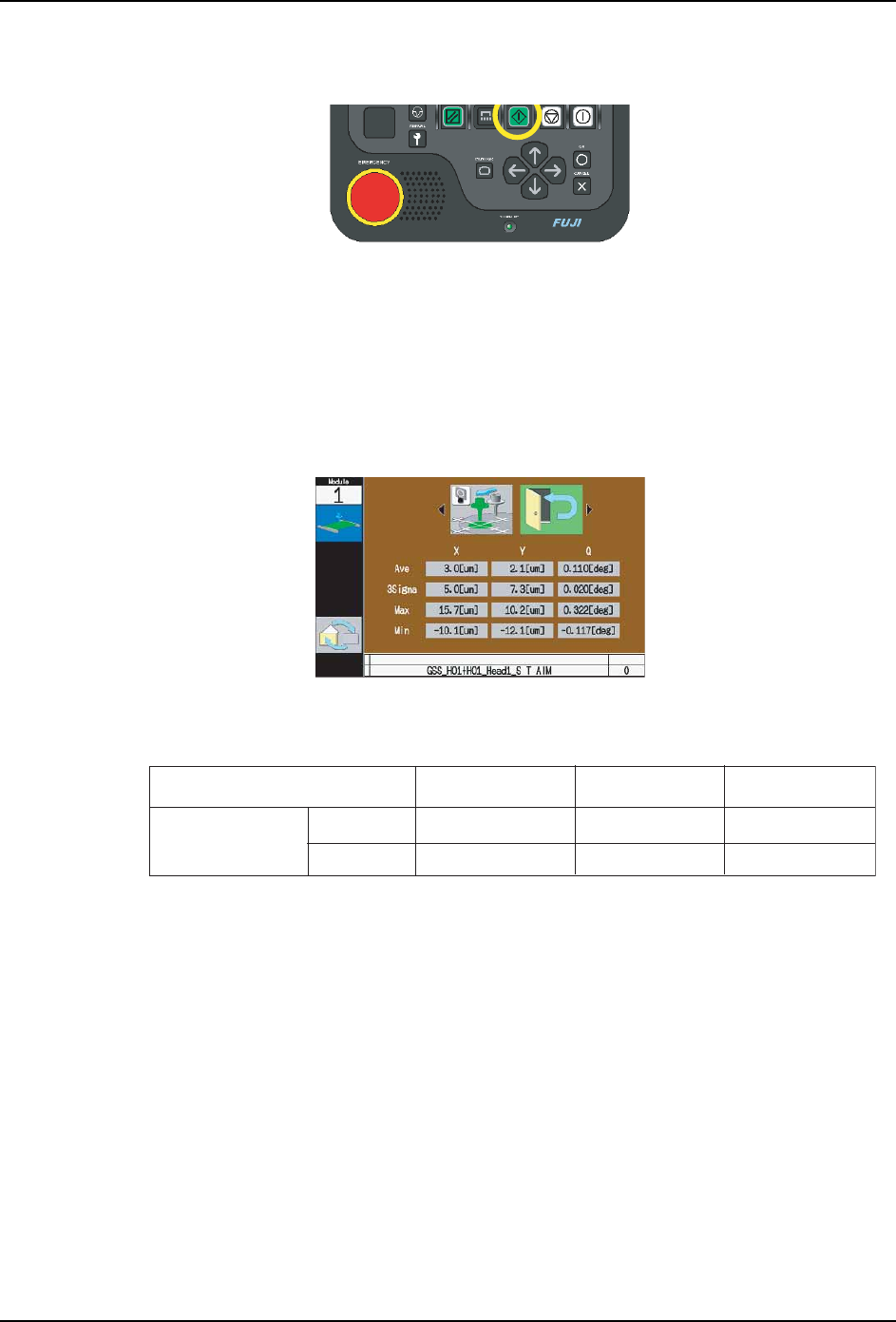
10.按下 MANUAL 按钮,返回等待 START 画面后,请按下 START 按钮。机器开始贴装元件,测
定贴装精度。测定结束后,治具板自动地松开。
11.确认治具板的松开后,请按下 CYCLE STOP 按钮。返回到等待 START 画面。
12.按下 MANUAL 按钮,显示出手动指令画面后,请使用箭头键,选择排出电路板的指令,按
下OK按钮。
13.请根据向导画面拉出模组,取出治具板。然后慢慢地插入模组。
14.请按下 MANUAL 按钮。返回到等待 START 画面。
15.请记录在操作画面上显示的贴装精度测定结果。
16.PAM 的测定结果在公差范围以外时,有必要创建修正值文件。详细请参照 " 9.1.10 创建
修正值文件 "。但在 「精度确认模式」的时候,不能创建修正值文件。
17.请将在玻璃电路板上贴装的玻璃元件返回到治具板上,在 1005 白色元件时将双面粘纸从
玻璃电路板上剥离,重新粘贴新的粘纸。
在三搬运轨道搭载机测定 H02, H04, G04 工作头时
在以下的条件下,为了满足对精度测定必要的贴装点数,需要测定几次。请变更 Job,用 H02
工作头测量 2 次,用 H04、G04 工作头测定 4 次。详细请参考 " 9.1.2 样品 Job "。
α. 在三搬运轨道搭载机上测定 H02、H04、G04 工作头的时候
β. 如果玻璃元件只有 32 个,在单·双搬运轨道搭载机上测定 H02、H04、G04 工作头的时候
9.1.10 创建修正值文件
「PAM 模式」的时候,PAM 测定结束后创建修正值文件。修正值文件的创建方法,有简易创
建和手动创建。
简易创建可以不使用附加软件,方便地反映修正值数值到机器上。在需要手动创建以外的时
候,请使用简易创建。手动创建请在以下的例子时使用。
NXTOPE139
01MEC-0640
1;7%$66D
++6
*
䌈㺙㊒ᑺ³
&SṈ
&SṈ
f
f
f
f
f
f
+ǃ
+
+ǃ
2)ǃ
+ǃ