NXTII 机械手册.pdf - 第62页
3. 各部分的功能说明 QD145-04 40 NXT Ⅱ机械手册 3.2 模组 各个模组是由 XY 机械手、搬运轨 道、电路板挡块、 料站托架、 影像处理相机等构成。 XY 机 械手上设有搭载贴装工作头的支 架。 3.2.1 M3-2 模组 宽度为 320mm, 占有基座上 1 个单位的空间。 模组内有通过伺服马达 和滚珠丝杆驱动的 X 轴、 通过线性马达驱动的 Y 轴,还在 XY 机械手上配备有作为子轴的 XS 轴。 3.2.2 M…
QD145-04 3. 各部分的功能说明
NXT Ⅱ机械手册 39
3. 各部分的功能说明
本章就主要部件的功能进行说明。
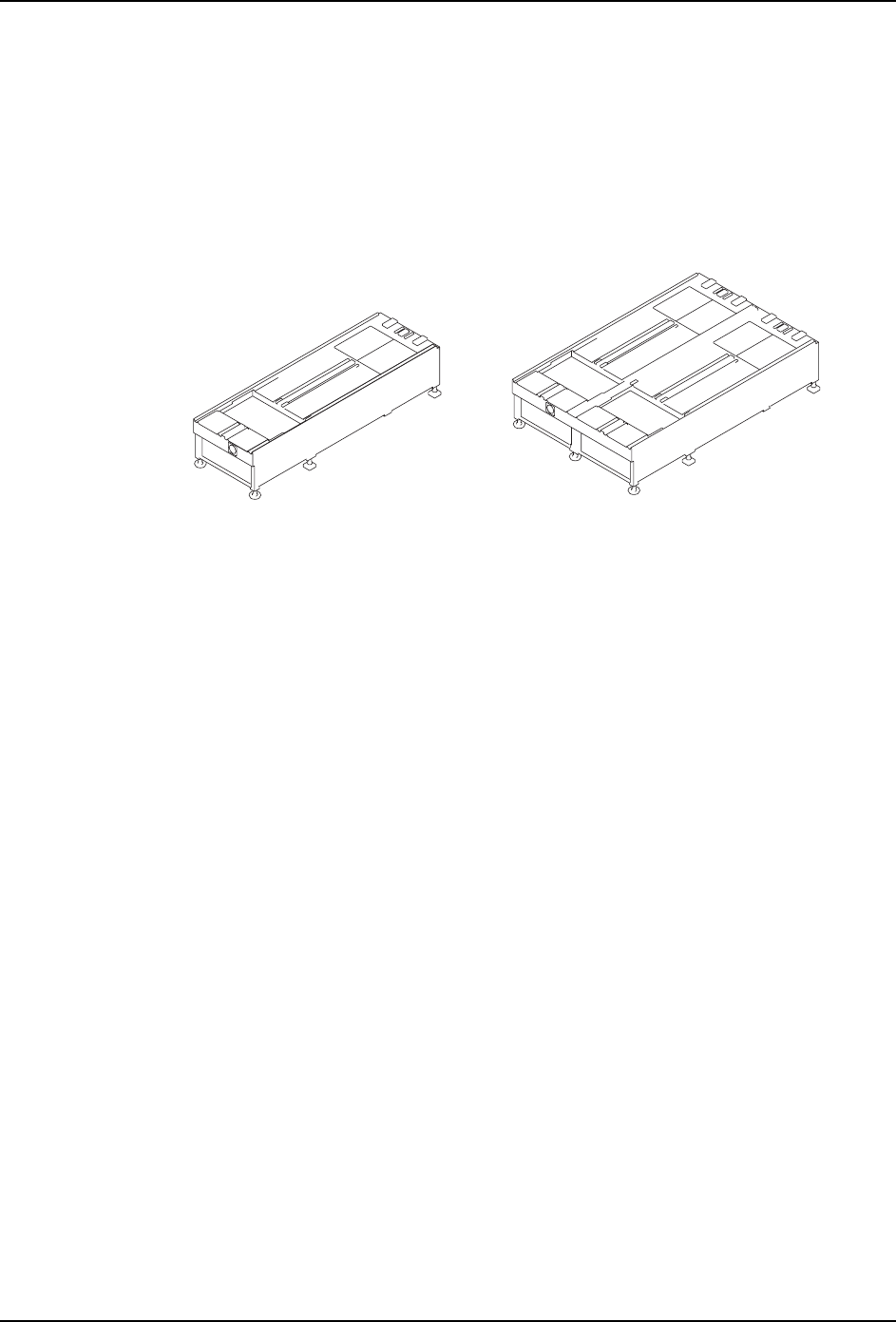
3.1 基座
基座上装载着模组。使用与模组结构相匹配的基座。
搭载三搬运轨道的模组,请使用专用基座。
3.1.1 2M-2 基座
最多可装载 2 台 M3-2 模组。如果是 M6-2 模组,则可装载 1 台。
3.1.2 4M-2 基座
最多可装载 4 台 M3-2 模组。如果是 M6-2 模组,则可装载 2 台。
01MEC-0312Sa
0ᑻ
0ᑻ
3. 各部分的功能说明 QD145-04
40 NXT Ⅱ机械手册
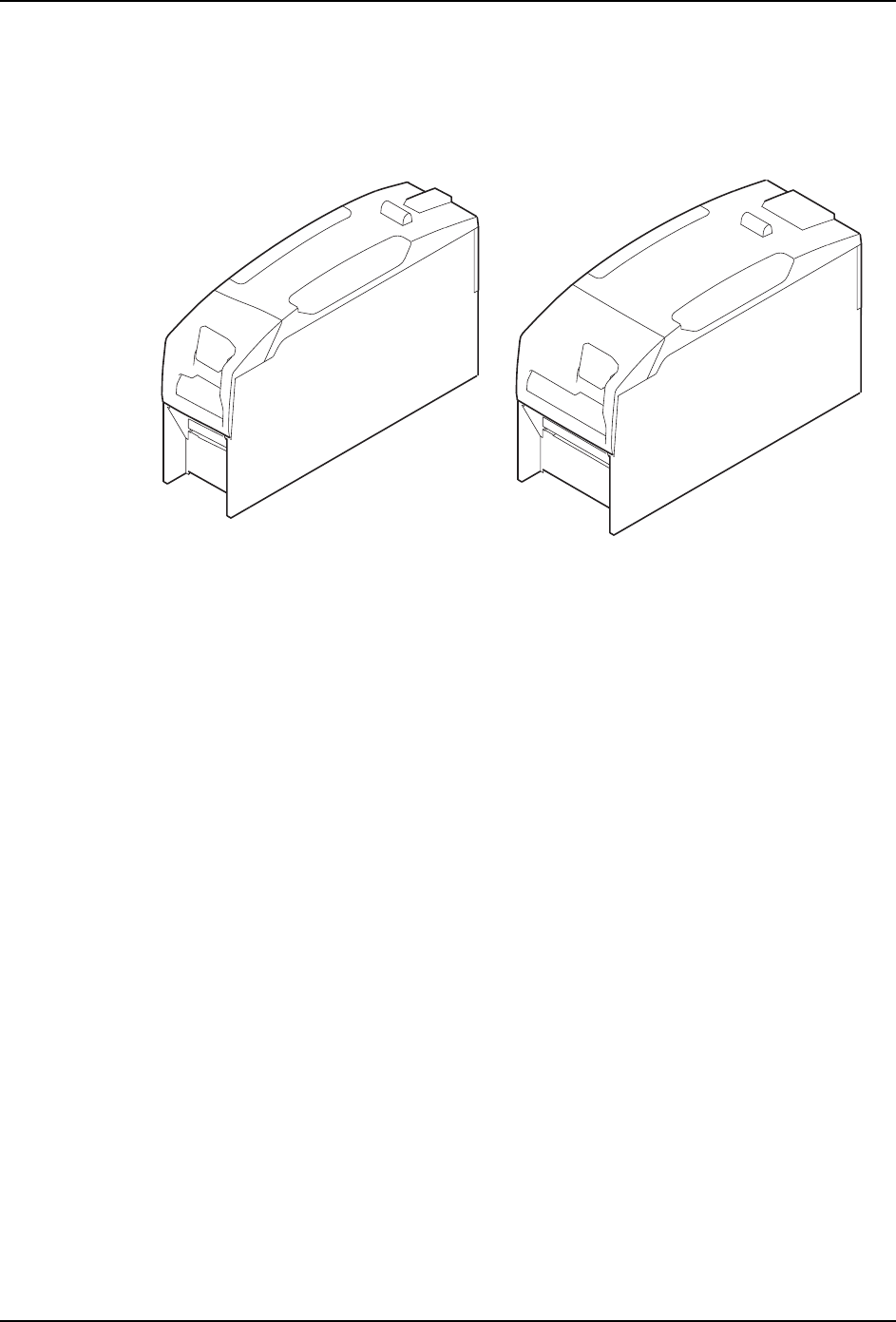
3.2 模组
各个模组是由 XY 机械手、搬运轨道、电路板挡块、料站托架、影像处理相机等构成。XY 机
械手上设有搭载贴装工作头的支架。
3.2.1 M3-2 模组
宽度为 320mm,占有基座上 1 个单位的空间。模组内有通过伺服马达和滚珠丝杆驱动的 X 轴、
通过线性马达驱动的 Y 轴,还在 XY 机械手上配备有作为子轴的 XS 轴。
3.2.2 M6-2 模组
宽度为 645mm,占有基座上 2 个单位的空间。模组内配备有根据伺服马达和滚珠丝杆驱动的
X 轴、Y 轴。
0(&6
0㒘
0㒘
QD145-04 3. 各部分的功能说明
NXT Ⅱ机械手册 41
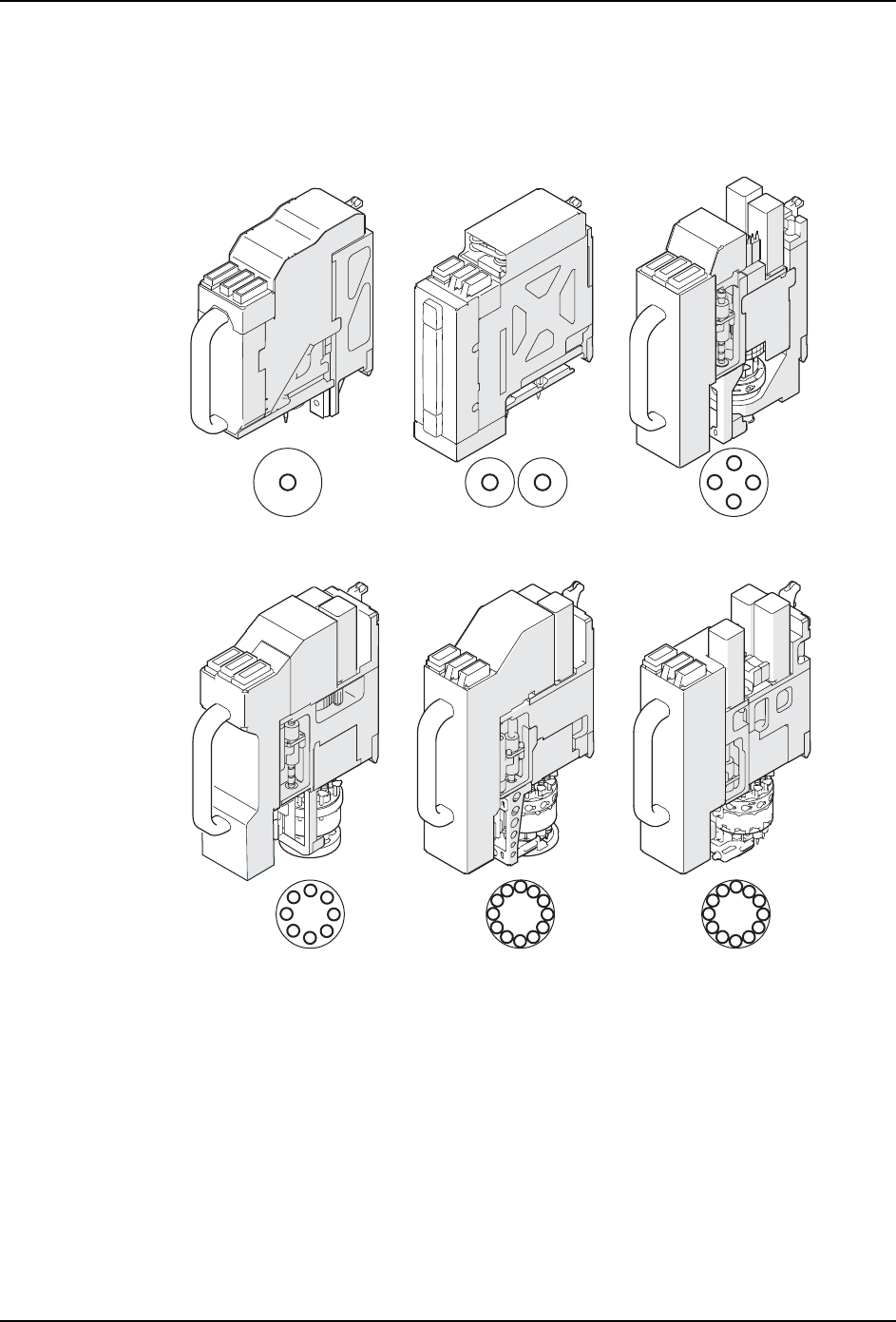
3.3 贴装工作头
贴装工作头进行从供料器上吸取部件并把它贴装到电路板上的工作。有 6 种类型的贴装工作
头,各自都能方便地在模组间交换搭载。
备注 )关于 OF 工作头,请参考「NXT/AIM OF 工作头使用说明书」、关于 G04 工作头,请参考
「NXT 机械手册 -G04 工作头补充版 -」、关于 H08Q,H12SQ 工作头,请参考 「带元件侧
面识别功能的工作头使用说明书」。
01MEC-0314S
+Ꮉ༈
+6Ꮉ༈
+Ꮉ༈
+Ꮉ༈ +Ꮉ༈
++6Ꮉ༈