KE-3010A_20VA_20VRA_使用说明书.pdf - 第894页
第 2 部 功能详解篇 第 9 章 手动控制 9-29 9-5 传送系统 9-5-1 传送控制 依次从下拉菜单中选择 [ 传送系 (C)]-[ 传送控制 (V)] 、或点击命令按钮中的 [ 传送控制 ] 后,可显 示传送控 制画面。 画面上部用形象图显示传送马达、传送传感器的当前的状态 ( 参见 (1) 传送传感器 ) 。 可通过画面中央的按钮选择控制对象。 (1) 传送传感器 各传送传感器、传送马达 ON 的状态下,可描述如下。 把光…
第 2 部 功能详解篇 第 9 章 手动控制
9-28
状态 说明
104
图像检查区域错误。
图像检查区域的边缘设定错误。
105
图像检查失败。
图像检查参数的比较失败。
106
出现在目前指定的“错误级别”中没有定义的错误。
需要改变“错误级别”。
107
OFAL 模块在没有初始化的状态下试图执行传感器功能。
108
异步命令的传送信号失败。
109
SWEEP 的识别处理未结束。
110
安装对象在专属访问状态下时,其他的安装对象处于准备执行状态。
111
安装对象在专属访问状态下时,其他的安装对象处于准备执行状态。
112
虽没有处于专属状态,但系统仍执行解除专属状态的处理。
113
因其他原因测量异常结束。
114
保存在 MSP 内的 COR(吸嘴旋转中心的位置)异常。
・
表 2 边缘检查结果
显示项目 说明
平均亮度
相应 Head 的激光能级的平均值。
标准偏差
各像素的实际激光能级的值和原来能级值之间的差的偏差值。此偏差值
越大,表示激光存在脏污或激光单元异常的可能性越大。
最小亮度
显示亮度最低的传感器的亮度和所在位置。
最大亮度
显示亮度最高的传感器的亮度和所在位置。
边缘检查
显示执行边缘检查时的最高边缘检查值及其所在的位置。
边缘检查状态
显示边缘检查的执行结果。
状态 1:正常。
状态 0:边缘检查异常。
请通过边缘检查画面确认激光脏污。
・
表 3 R-Head(CDS)计测结果(实时更新)
显示项目 说明
CDS 传感器
ON/OFF 状态(激光库返回值)
CDS 值
读取的 AD 值(激光库返回值)
9-4-4 吸取/贴片监视器控制
选择下拉菜单的[帮助(D)]-[吸取/贴片监视器控制(P)],即显示吸取/贴片监视器控制的画面。
详细情况请参见『吸取/贴片监视器 使用说明书』。
第 2 部 功能详解篇 第 9 章 手动控制
9-29
9-5 传送系统
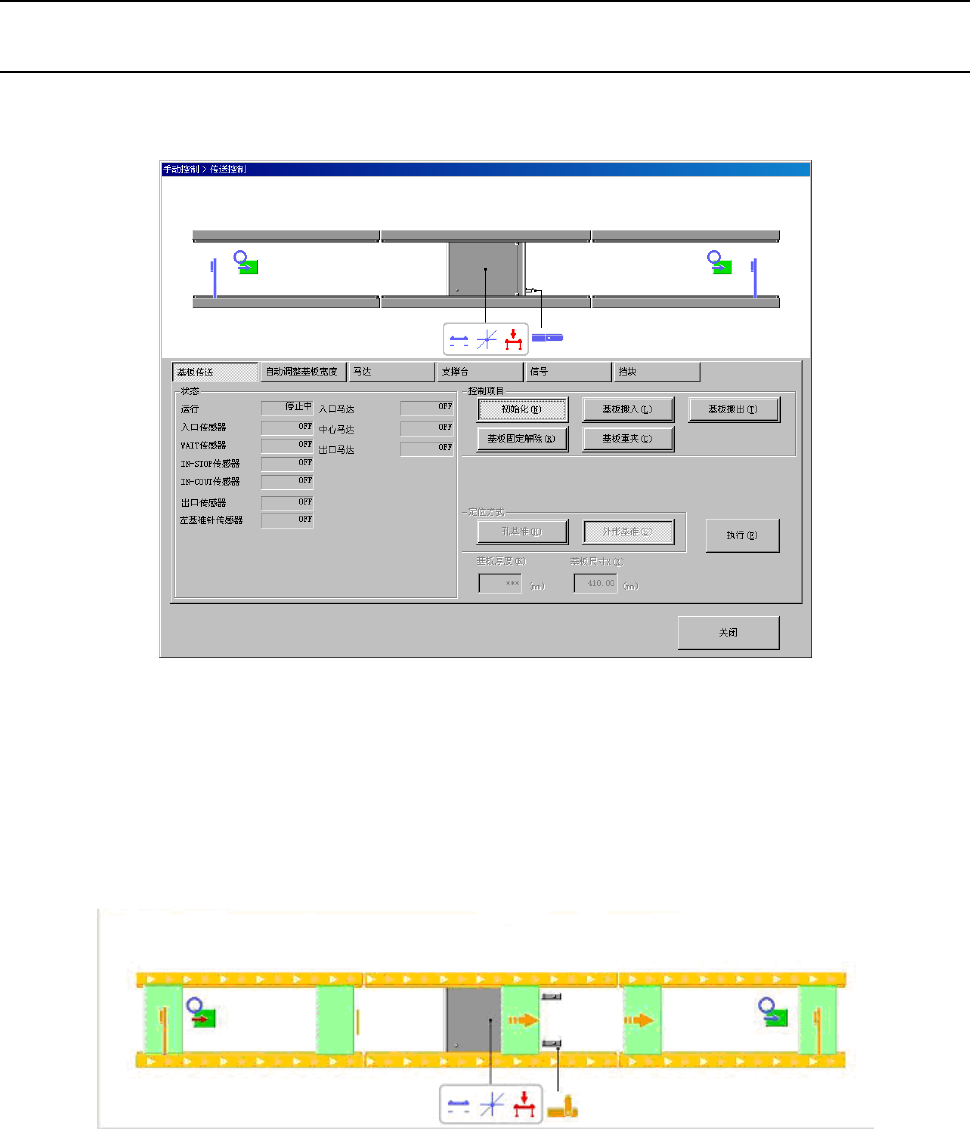
9-5-1 传送控制
依次从下拉菜单中选择[传送系(C)]-[传送控制(V)]、或点击命令按钮中的[传送控制]后,可显示传送控
制画面。
画面上部用形象图显示传送马达、传送传感器的当前的状态(参见(1)传送传感器)。
可通过画面中央的按钮选择控制对象。
(1) 传送传感器
各传送传感器、传送马达 ON 的状态下,可描述如下。
把光标对准传感器时,即可显示工具提示。
第 2 部 功能详解篇 第 9 章 手动控制
9-30
其他传感器的显示列表如下。
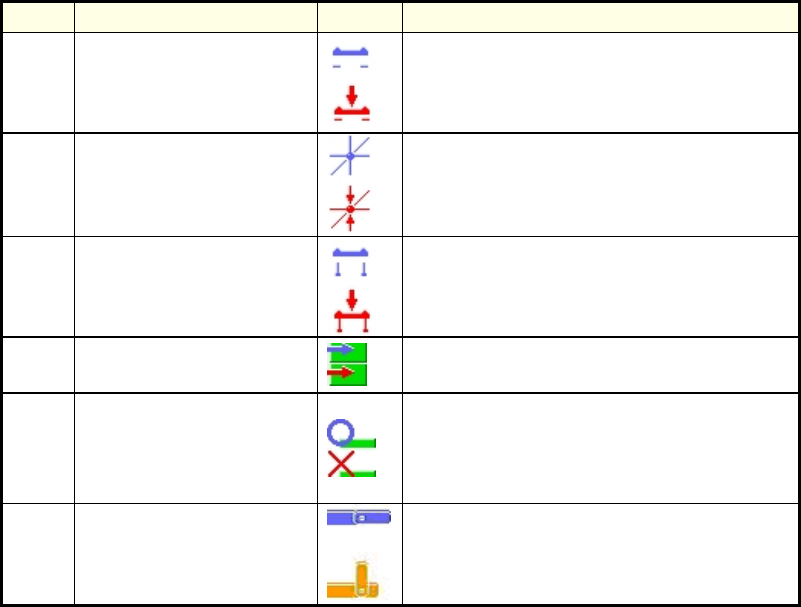
No.
显示项目 显示图 表示内容
1
支撑台挡块(CE 机)
支撑台挡块处于 OFF 状态。
支撑台挡块处于 ON 状态。
2
支撑台原点传感器
支撑台处于 OFF 状态。
支撑台处于 ON 状态。
3
传送挡块干涉传感器
传送挡块干涉传感器处于 OFF 状态。
传送挡块干涉传感器处于 ON 状态。
4
准备输入(Ready In )
准备输出(Ready Out )
准备输入(Ready In )处于 OFF 状态。
准备输出(Ready Out )处于 ON 状态。
5
能搬入基板
(Board Available In)
能搬出基板
(Board Available Out)
Board Available In·OUT 处于 OFF 状态。
Board Available In·OUT 处于 ON 状态。
6
停止挡销
停止挡销处于 OFF 状态。
停止挡销处于 ON 状态。