SM-131-006.pdf - 第292页
Device Name Chip Mounter Block Name Page No. Unit Name Revision Model Item GXH-1 Chapter 17 Servo Alarm 1. Troubleshooting on Servo Alarm Alarm Codes Contents of Servo Alarm Cause and Remedy When an error was corrected a…
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model Item GXH-1
Chapter 17 Servo Alarm
1. Troubleshooting on Servo Alarm
Alarm
Codes
Contents of
Servo Alarm
Cause and Remedy
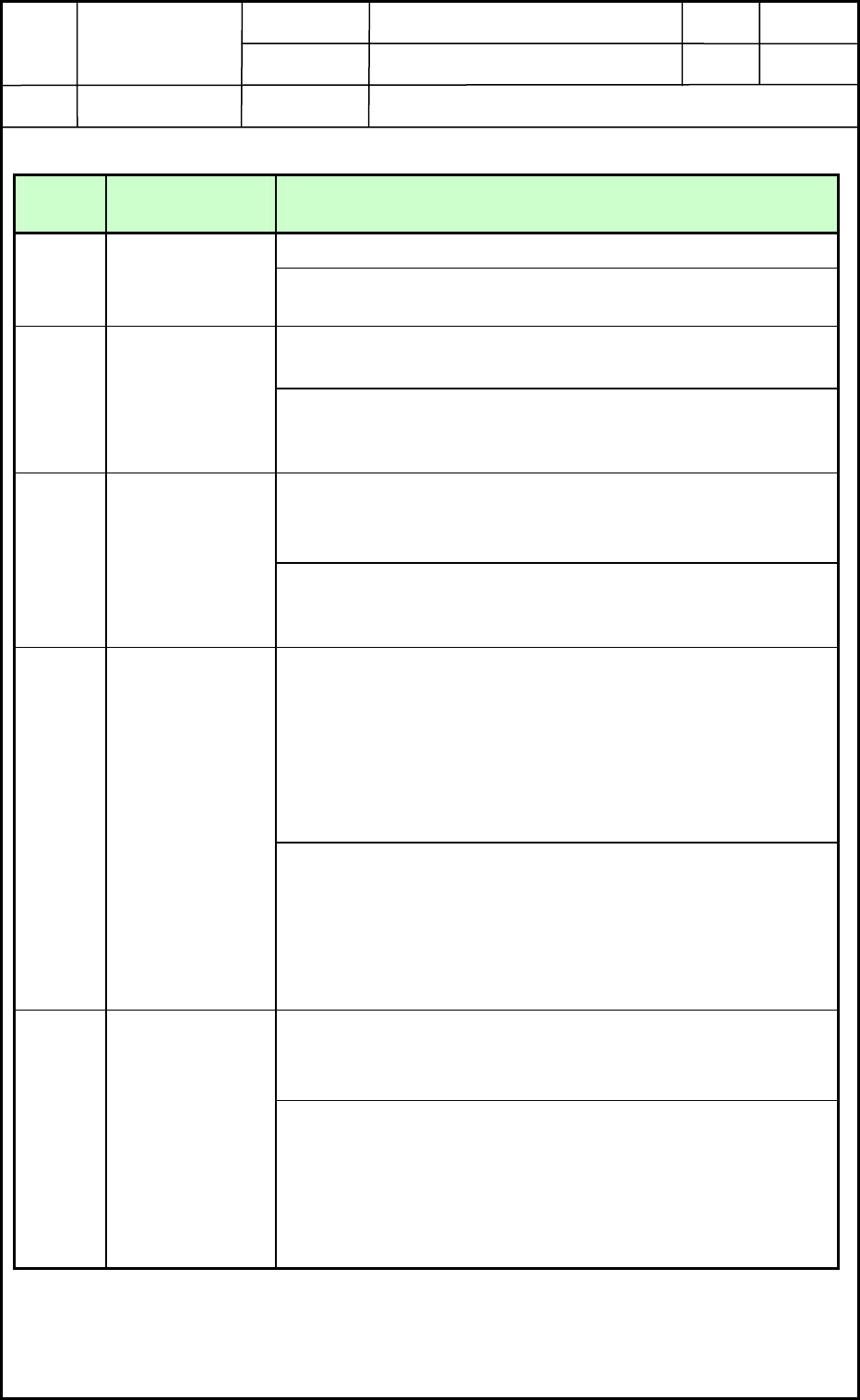
Stopped by the interference check stop axis. 46 Interference chk
stop axis
(Remedy)
The driving mode was changed under the condition that
prohibits the mode change of the parallel driving axis.
50 Pal dr mode
chng uncorrect
(Remedy) Change the driving mode only when the
requirements for the change are fulfilled.
The zeroing, the automatic, or the linear interpolation
operation was performed in the asynchronous fine
adjustment mode of the parallel driving axis.
51 Pal dr
asynchronous
mode
(Remedy) Perform the zeroing, the auto, or the linear
interpolation operation in the synchronous mode.
(1) A zeroing method other than the scale origin signal
detection type is selected for the zeroing operation of the
parallel driving axis.
(2) No pair axis relative to the parallel driving axis group No.
is specified.
Or, the same parallel driving group No. is specified for
more than 3 axes.
52 Pal dr axis setup
Error
(Remedy 1) Select the zeroing method (described in the left
column) for the zeroing method of "Zeroing
Option 1".
(Remedy 2) Set the corresponding parallel driving axis
group No., making a pair.
As for the parallel driving axis, the deflection between the
master and slave axes exceeded the parallel driving
deflection excess range.
53 Pal dr deflection
is excessive
(Remedy) Perform an adjustment so that the deflection
between the master and slave axes can decrease.
In addition, review the deflection excess width of
the parameter and the delay of the excess
deflection detection start.
17-30
0506-001
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model Item GXH-1
Chapter 17 Servo Alarm
1. Troubleshooting on Servo Alarm
Alarm
Codes
Contents of
Servo Alarm
Cause and Remedy
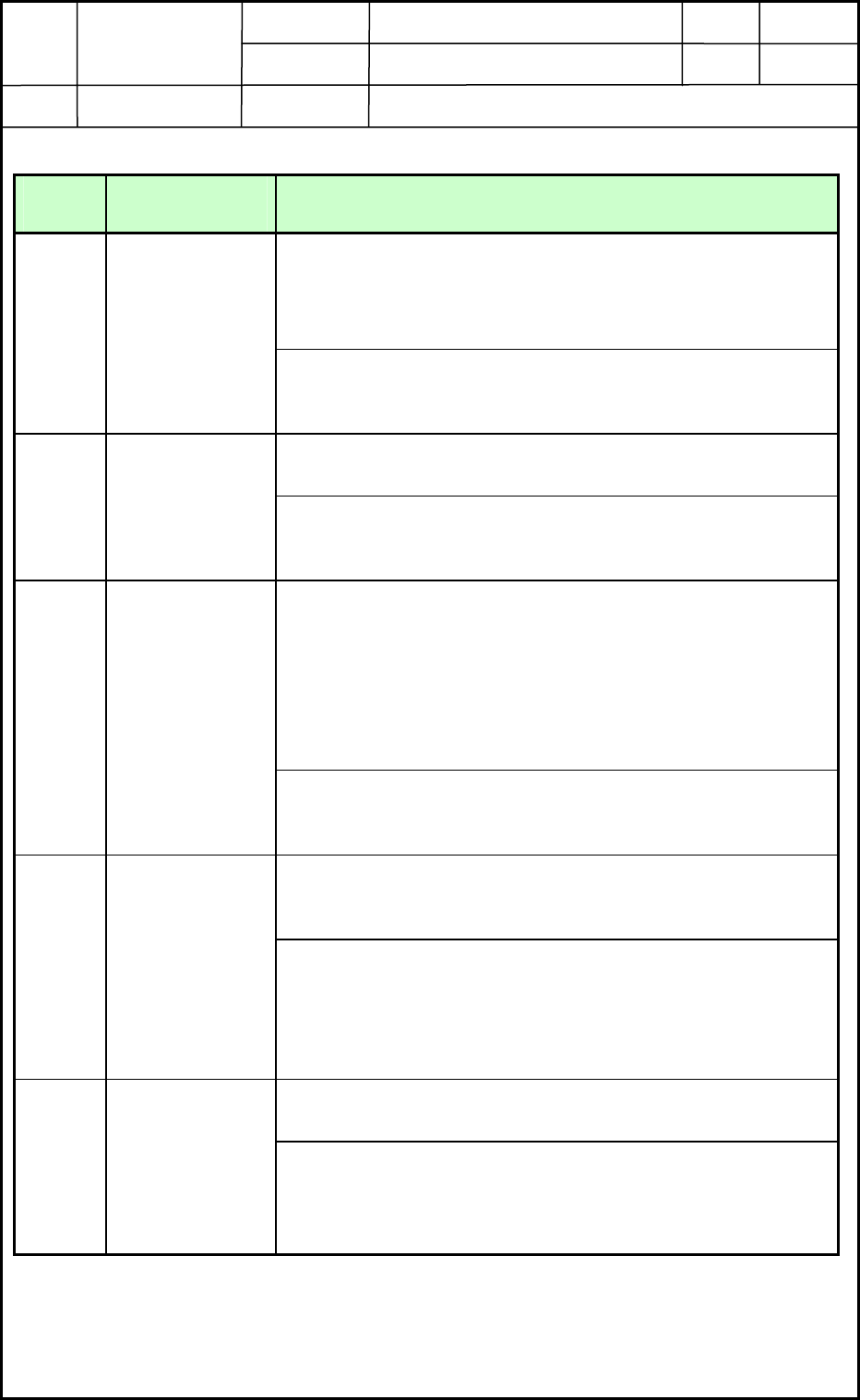
When an error was corrected at "Servo ON" in the
synchronous mode of the parallel driving, the deflection
exceeded the effective synchronization range of the
parameter.
54 Pal dr sync and
effect wd is
illegal.
(Remedy) Review the synchronous effective width of the
parameter.
The machine was started during error correction at "Servo
ON" in the synchronous mode of the parallel driving.
55 Pal dr sync
matches
executing
(Remedy) Do not perform the startup operation while the
synchronization signal is "ON".
The following errors occurred on the slave axis side while
the machine was running in the synchronous mode of the
parallel driving.
(1) Servo Alarm
(2) Servo OFF, Ready OFF (Including the emergency stop)
(3) Communication Error or Power OFF
56 Pal dr slave axis
is abnormal.
(Remedy) Remove the cause of the error from the slave axis
side.
While the parallel driving was being zeroed, the deviation
between the master and slave axes exceeded the tolerance
width.
57 Pal dr gap corr
allow wd
exaggerated
(Remedy 1) Perform an adjustment so that the mechanical
deviation between the master and slave axes can
stay within the tolerance wide.
(Remedy 2) Set correct values for the parallel driving
zeroing signal offsets (Pr.023C and Pr.023D).
The stop command was entered during error correction at
"Servo ON" in the synchronous mode of the parallel driving.
58 Pal dr sync
matches illegal.
(Remedy) The synchronization will be interrupted and the
zeroing will not be completed.
Perform the zeroing operation again.
17-31
0506-001
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model Item GXH-1
Chapter 17 Servo Alarm
1. Troubleshooting on Servo Alarm
Alarm
Codes
Contents of
Servo Alarm
Cause and Remedy
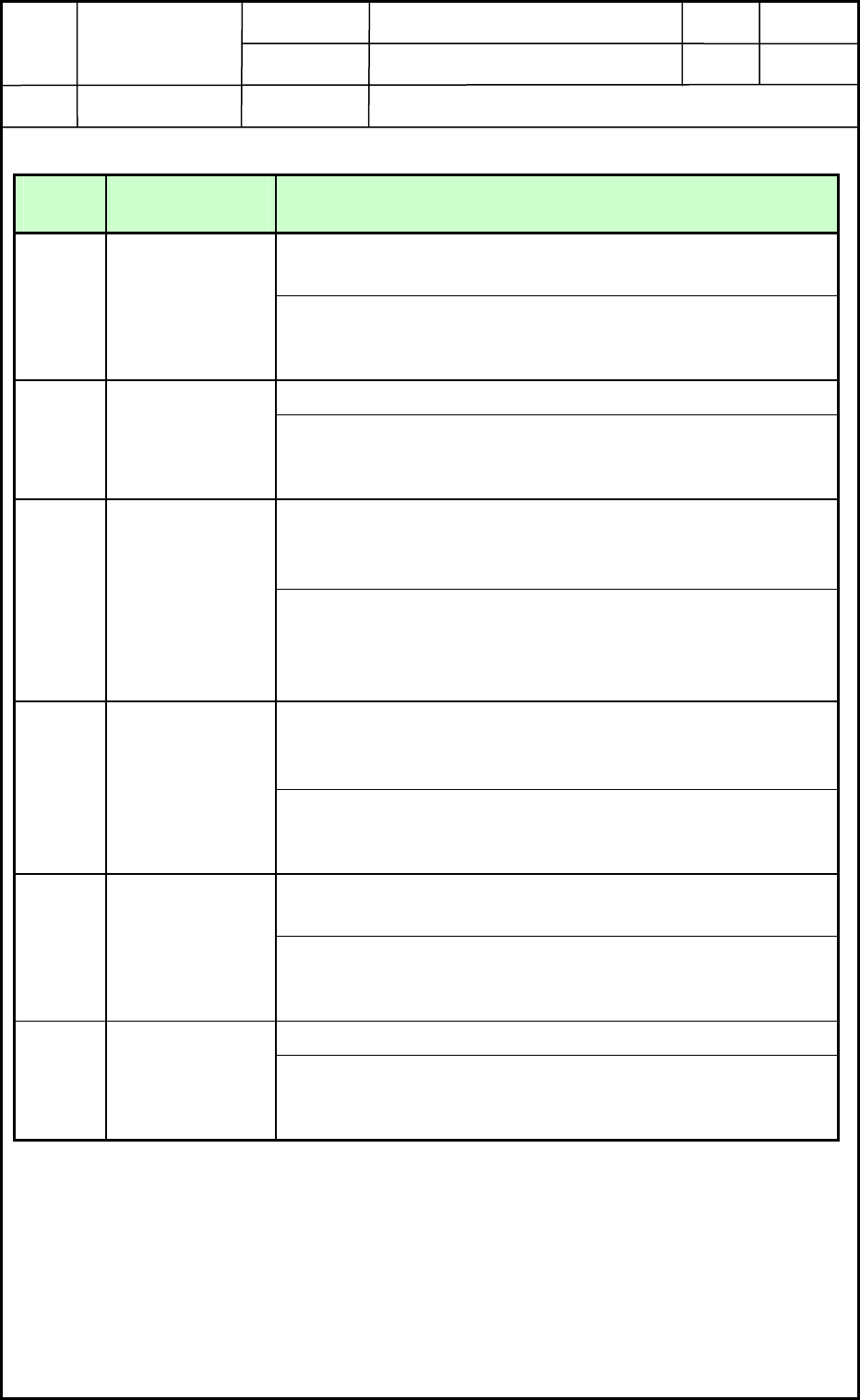
The automatic operation or the linear interpolation operation
was performed without the zeroing operation.
90 Zero return is
incomplete
(Remedy) Perform the zeroing operation.
Or, make "No Origin" valid with a parameter.
It did not pass through Phase Z. 91 Encoder(Z) not
pass
(Remedy) Give the motor a turn or more in the + or the -
direction and perform the zeroing operation.
As for the dog-type zeroing operation, the machine was not
stopped (deceleration stop) at the position over the dog after
the dog was turned ON.
92
Dog is short
(Remedy) Make the near-point dog longer.
Or, decelerate the zeroing speed so that it can stop
over the dog.
As for the pusher-type zeroing operation, the pushing
direction was opposite in comparison with the zeroing
direction.
94 Zero position
setup mode
Error
(Remedy) Set the same direction as the pushing one for the
zeroing direction.
The torque limiter was not turned ON during the pusher-type
zeroing operation.
95 Torque limitation
not turned on
(Remedy) Start the zeroing operation after the pushing is
made and the limit is turned ON.
The zeroing was set before motor alignment. 96 Zero setup Error
(Remedy) Adjust the servomotor so that it can be aligned
promptly when it stops at its origin.
17-32
0506-001