SM-131-006.pdf - 第90页
Device Name Chip Mounter Block Name Page No. Unit Name Revision Model Item GXH-1 Chapter 4 Beam Section 3. Replacement of Servoamplifier 3.1 Detachment of Servoamplifiers (1) Shut down the power to the machine. (2) Detac…
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Y-Axis Motor
Revision
Model ItemGXH-1
Chapter 4 Beam Section
2. Replacement of Y-Axis Motor Stator and Rotor
2.3 Attachment of Y-Axis Motor Stators and Rotors
(1) Attach Stator 3.
Positioning Method: Push Direction X against the reference pin and Direction Y
against the rear side.
(2) Attach Stator 2.
Be sure to push Stator 2 until it touches Stator 3.
(3) Attach the front rotor to the fixing block in the area of Stator 1 and move it toward the
front side.
(4) Attach the rear rotor to the fixing block in the area of Stator 1 and move it toward the
front side.
(5) Mount Stator 1.
Be sure to push Stator 1 until it touches Stator 2.
(6) Attach the other parts and units that were detached.
Specified Values Table D1
Name Specified Values
Pushing Distance (Clearance) for
Positioning
The thickness gauge of 0.01 mm
should not pass through the clearance.
Clearance between Stator and Rotor
(Fig. D4)
0.7±0.2 mm (all over the area)
2.4 Adjustment and Teaching Operations Required after
Replacement
The offsets must be adjusted generally.
Refer to "6. Adjustment of Offsets" in Chapter 5 for details.
0406-001
4-4
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model ItemGXH-1
Chapter 4 Beam Section
3. Replacement of Servoamplifier
3.1 Detachment of Servoamplifiers
(1) Shut down the power to the machine.
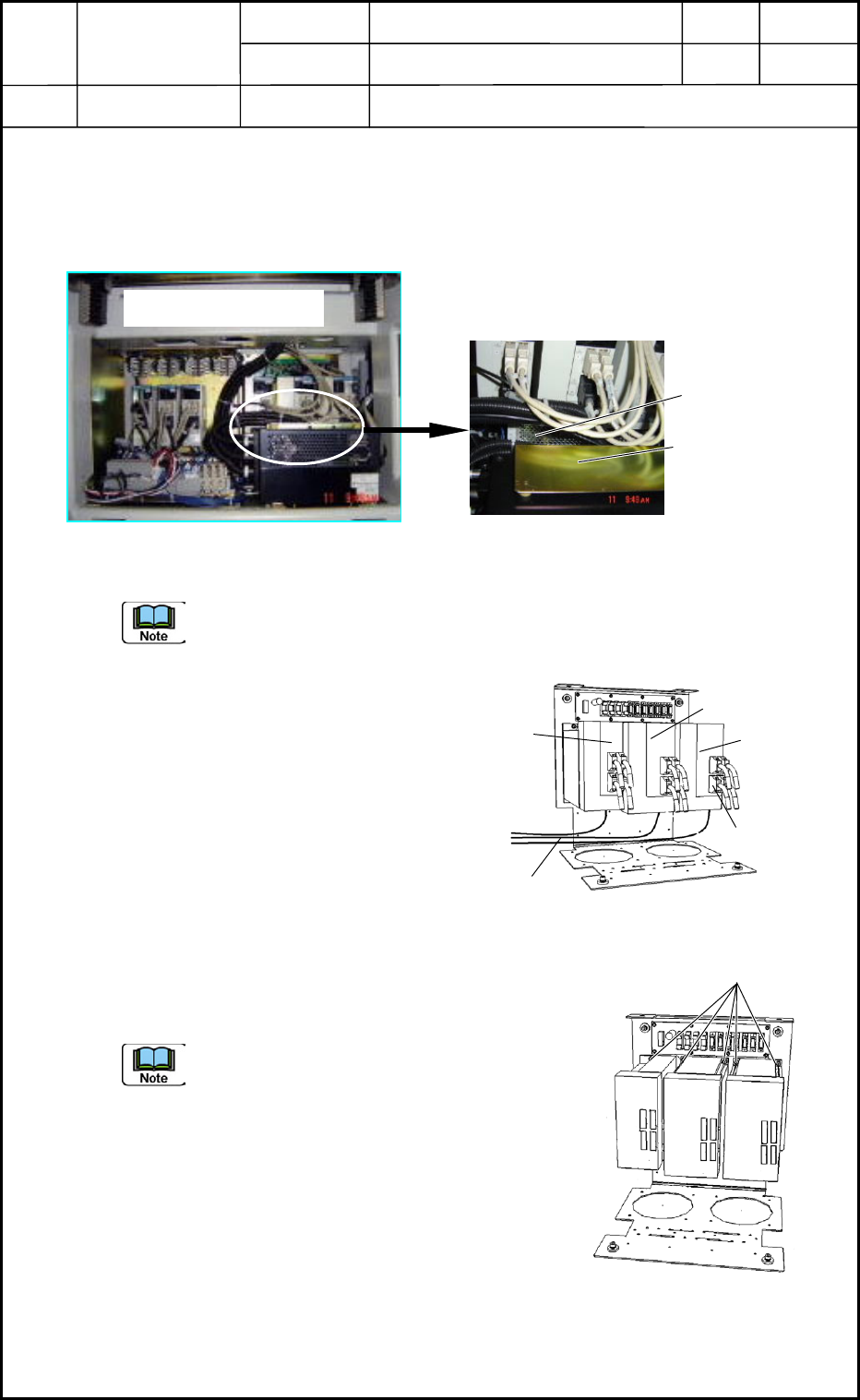
(2) Detach the lamp unit for component recognition lighting and set the servoamplifiers
(Fig. D5) in the condition as shown in Fig. D6.
Fig. D5 Servoamplifiers
There is a power source provided only in Section C and it is required to detach the
DC power unit. No power unit is provided in Sections A, B, and D.
(3) Disconnect the connectors, the power
lines, etc., from the object
servoamplifier with the servoamplifiers
being kept in the condition shown in
Fig. D6.
(4) Remove the setscrews of the object servoamplifier
and detach the main body of the servoamplifier.
The shank of the screwdriver should be 20 cm
or longer for this work.
3.2 Attachment of Servoamplifiers
Follow the reverse order of detachment to attach the servoamplifiers.
Lamp Unit for
Component
Recognition Lighting
Section C
Magnified View (Top
DC Power Su
pp
l
y
Section C (Third Stage)
Fig. D6 Servoamplifiers
Y2 Axis
X Axis
Power Lines
Y1 Axis
Connector
X Axis
Y1 Axis
Y2 Axis
Setscrews
Fig. D7 Servoamplifiers
0406-001
4-5
Device
Name
Chip Mounter
Block Name
Page No.
Unit Name
Revision
Model Item GXH-1
Chapter 4 Beam Section
4. Replacement and Adjustment of X-Axis Encoder
4.1 Detachment of X-Axis Encoder
(1) Shut down the power to the machine.
(2) Detach the covers, etc., of the machine for better working environment.
Be careful not to make nicks on the linear scale during the detachment work.
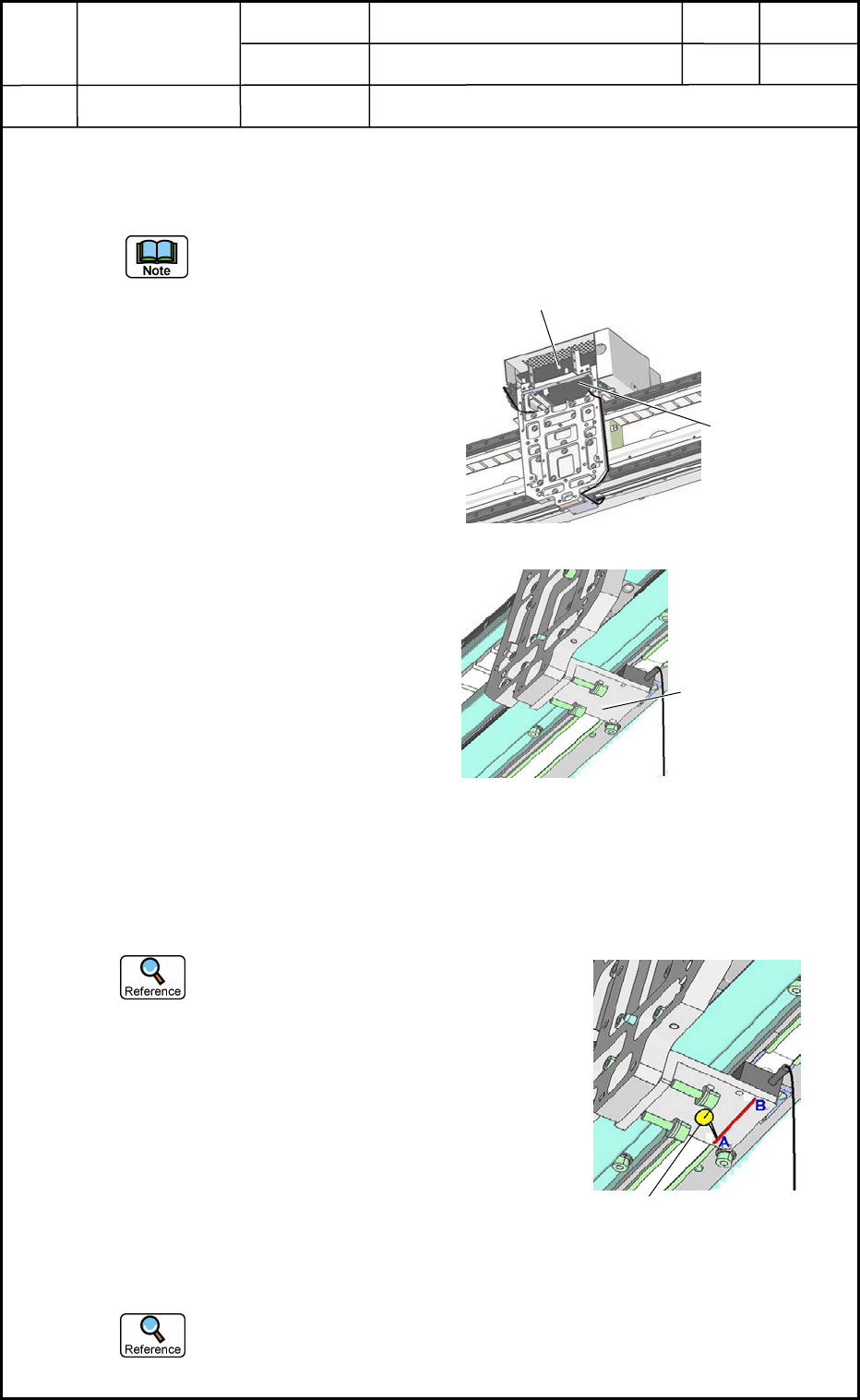
(3) Disconnect the connector from the
encoder fixed in the head wiring
section.
Refer to "1. Replacement of Head
Unit" in Chapter 5 for details.
(4) Detach the encoder mounting block
and then the encoder.
4.2 Attachment of X-Axis Encoder
(1) Attach the encoder to the encoder mounting block and temporarily tighten the
setscrews to fasten it to the main body as shown in Fig. D10.
Be sure to attach the encoder so that the cable
can be directed to the right (viewed from the
front side of the mounted encoder) in the case of
Section A.
In the case of Section B, the cable should be
directed to the left.
(2) Position the block and tighten the setscrews securely.
• Use a dial gauge and move the block to its correct
position so that the clearance between the encoder
and the scale can be "0.05 to 0.25 mm" all the way
along the scale.
• Use a dial gauge as shown in Fig. D10 and move the block.
When the power line of the motor is disconnected during the adjustment, the beam
can move lightly.
0506-002
4-6
Head Wiring Section
Connector
Fig. D8 Head Unit Base
Encoder
Mountin
g
Block
Fig. D9 Encoder Attachment Section
(Lower Side)
Fig. D10 Adjustment of
Parallelism
Dial Gauge