KE-2000R_InstructionManual_C_Rev00说明.pdf - 第201页
第 1 部 基本编 第 2 章 生产 2-100 ① 激光高度判定值 显示进行激光高度检测所必需的内容。( )内显示检测前的值。 ● 激光高度 可任意改变激光高度。 在此设定的值, 将作为下一项目的 “激光高度检测范围” 的 “当 前高度位置”被使用。 ● 将检测结果反映在元件数据中 要将检测的激光高度结果反映在产品数据中时请选中该项。 ● 元件高度也同时检测 如果选中, 则在激光高度检测前检测元件高度。 同时也自动计算激光高度。 因为…
第 1 部 基本编 第 2 章 生产
2-99
(1) 所检查的元件
显示元件内容及吸取位置。
(2) 检测元件的吸取位置
显示吸取元件的吸取位置的内容。
可通过HOD的“NEXT”、“PREVIOS”或“F5”键、“F6”键改变对前代替元件及后代替元件
的吸取位置。
● 送料器
敲打一下送料器,送出元件(32mm纸带除外)。
● 将吸取数据中反映在示教结果中
选择是否在吸取数据中反映使用HOD示教的结果。不选时,坐标仅适用于此次吸取时。
(3) 检查值
显示进行检查元件的激光高度及元件高度。
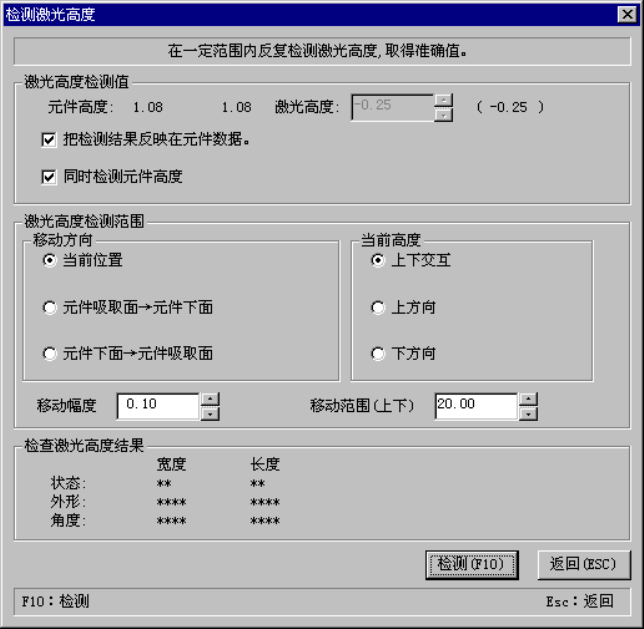
(4) 检测
检测激光高度。
单击“检测”显示如下画面。
图 2.10.6.3.10 激光高度检测
第 1 部 基本编 第 2 章 生产
2-100
① 激光高度判定值
显示进行激光高度检测所必需的内容。( )内显示检测前的值。
● 激光高度
可任意改变激光高度。在此设定的值,将作为下一项目的“激光高度检测范围”的“当
前高度位置”被使用。
● 将检测结果反映在元件数据中
要将检测的激光高度结果反映在产品数据中时请选中该项。
● 元件高度也同时检测
如果选中,则在激光高度检测前检测元件高度。同时也自动计算激光高度。因为此时自
动计算出的激光高度将作为“激光高度检测范围”的“当前高度位置”被使用,所以不
可以任意指定激光高度。
② 激光高度检测范围
激光高度检测将在以下条件所示范围内反复进行激光高度检查,以已进行了定心的激光高
度作为最佳激光高度。
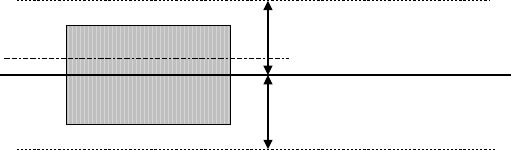
a)当前高度位置
从激光高度检测值中设定的“激光高度”值开始,按照“检测动作方向”的设定,对每
一“移动STEP”的设定值进行反复检测。当激光定心成功时,检测结束。
b)元件吸取面->元件下面
从吸取面(元件上面)到元件下面,一边移动“移动STEP”的设定值,一边检测。
c)元件下面->元件吸取面
从元件下面到吸取面(元件上面),一边移动“移动STEP”的设定值,一边检测。
d)移动幅度/移动范围
设定检测时的移动幅度和移动范围。
元件侧面
移动范围
移动step
当前激光高度
移动范围
图 2.10.6.3.11 激光高度判定范围(当前高度)
第 1 部 基本编 第 2 章 生产
2-101
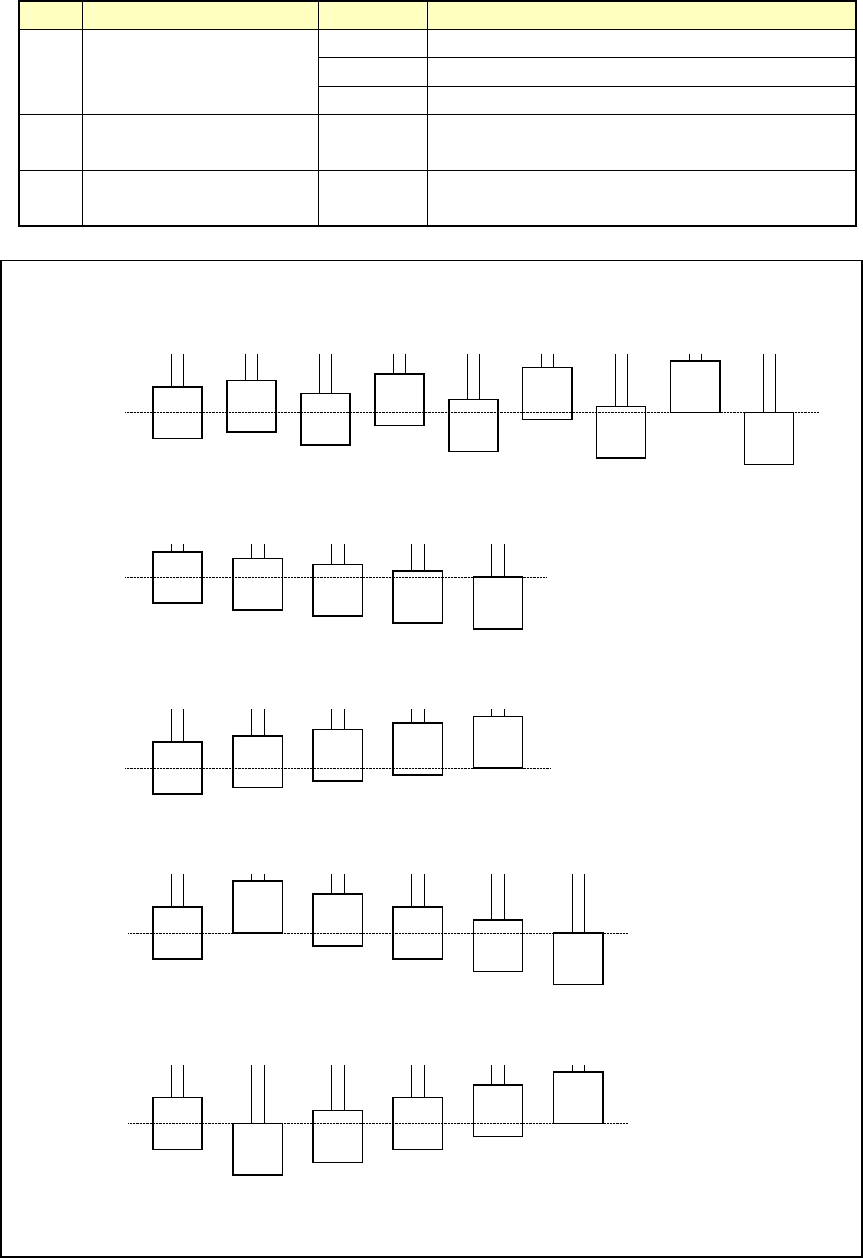
表 2.10.6.3.3 激光高度检测的重复范围
项目 开始点 方向 内容
上下交互 从当前位置开始上下交互进行连续检查。
上方向 从当前位置开始仅在上方向进行连续检查。
1 当前高度位置
下方向 从当前位置开始仅在下方向进行连续检查。
2 元件吸取面→元件下面 以元件高度为基础,从元件吸取面到上面进
行连续检查。
3 元件下面→元件吸取面 以元件高度为基础,从元件下面到元件吸取
面进行连续检查。
图 2.10.6.3.12 激光高度检测的重复范围
霞楚強恬(圷周嚥爾高互業議了崔購狼)
蝕兵泣:輝念互業了崔
圭㏍:貧和住札
簾恁
圷周
爾高互業
① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨
蝕兵泣:輝念互業了崔
圭㏍:貧圭㏍
① ② ③ ④ ⑤
① ② ③ ④ ⑤
蝕兵泣:圷周和中->圷周簾函中
圭㏍:---
①(霞楚念) ② ③ ④ ⑤ ⑥
①(霞楚念) ② ③ ④ ⑤ ⑥
蝕兵泣:輝念互業了崔
圭㏍:和圭㏍
爾高互業
簾恁
圷周
簾恁
圷周
爾高互業
爾高互業
爾高互業
簾恁
簾恁
圷周
圷周
蝕兵泣:圷周簾函中->圷周和中
圭㏍:---