KE-2000R_InstructionManual_C_Rev00说明.pdf - 第406页
第1部 基本篇 第4章 生产程序制作 4-101 ⑤ VCS聚焦高度 是有关识别时元件高度的偏移值。 引脚高度因和元件底面的高度有大的变化, 所以在 VCS 焦点(聚焦)不一致时输入。 元件 引脚 ⑥ 放置偏移量(贴片偏移) 图像定心的中心位置和贴片位置不同时,请将其差作为偏移值输入。 ⑦ 移动控制(姿态控制) 是在“吸取位置” 和“VCS 上” 中的速度、 高度的设置项目,但目前 VCS 上不进行姿态控 制(旋转等)。目前在 VCS …
第1部 基本篇 第4章 生产程序制作
4-100
4-3-7-4 元件
若“元件数据”的“元件种类”为“通用图像元件”,则可编辑。
详细内容请参见“第6章 通用图像”。
4-3-7-5 控制
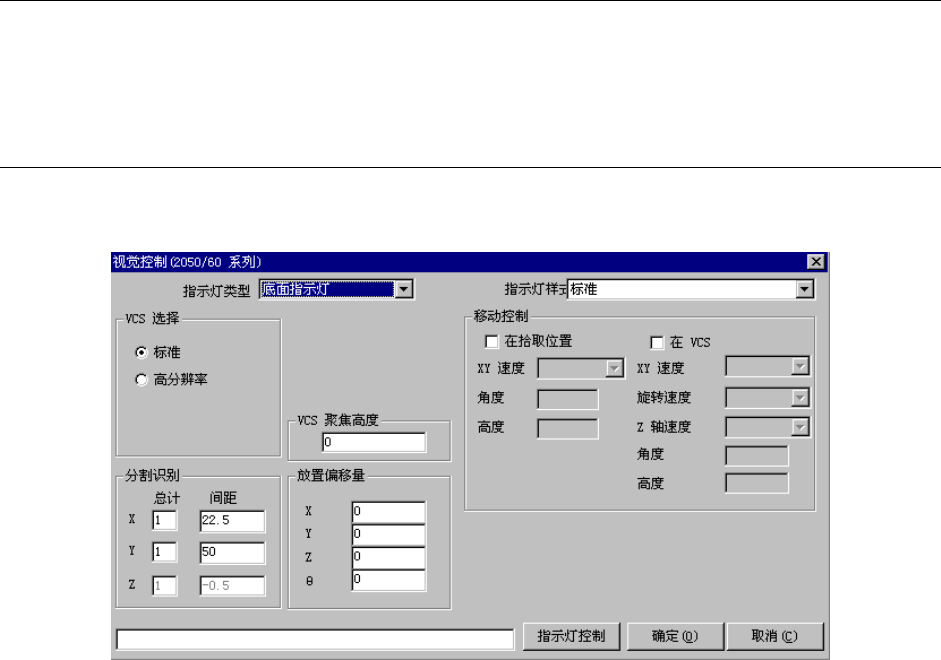
是对图像识别元件进行详细设置的画面。
通常,因设置有初始值,所以无需变更。
图 4.3.7.5.1 图像控制
① 指示灯类型(大分类)
可选择照明的种类。
② 指示灯样式(小分类)
可详细选择照明的种类。
选择项目根据“大分类”的指定而变化。
③ VCS选择
能选择要使用的 VCS。
请指定与设备相适应的选购件摄像机(通常为 27mm 的选购件)。
④ 分割识别
是用于进行分割识别的设置。根据 VCS 种类选择初始值。
在初始值状态下,当出现识别部位从 VCS 视角中消失等现象,引起不能正常识别时,对间
距进行变更。
关于“Z”,目前没有使用。
第1部 基本篇 第4章 生产程序制作
4-101
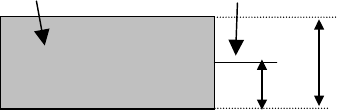
⑤ VCS聚焦高度
是有关识别时元件高度的偏移值。引脚高度因和元件底面的高度有大的变化,所以在 VCS
焦点(聚焦)不一致时输入。
元件 引脚
⑥ 放置偏移量(贴片偏移)
图像定心的中心位置和贴片位置不同时,请将其差作为偏移值输入。
⑦ 移动控制(姿态控制)
是在“吸取位置”和“VCS 上”中的速度、高度的设置项目,但目前 VCS 上不进行姿态控
制(旋转等)。目前在 VCS 上旋转到要识别的姿态后,移动到 VCS 上。
因此,“VCS 上”的项目无效。
另外,有关“吸取位置”,也仅是“高度”
※
有效。
※“吸取位置”的“高度”:吸取后转移到识别角度时的高度的偏移值。
⑧ 高度检查
是有关引脚悬浮检查(选项)的设置,目前没有使用。
A
B
A:VCS 聚焦高度
B:元件高度
第1部 基本篇 第4章 生产程序制作
4-102
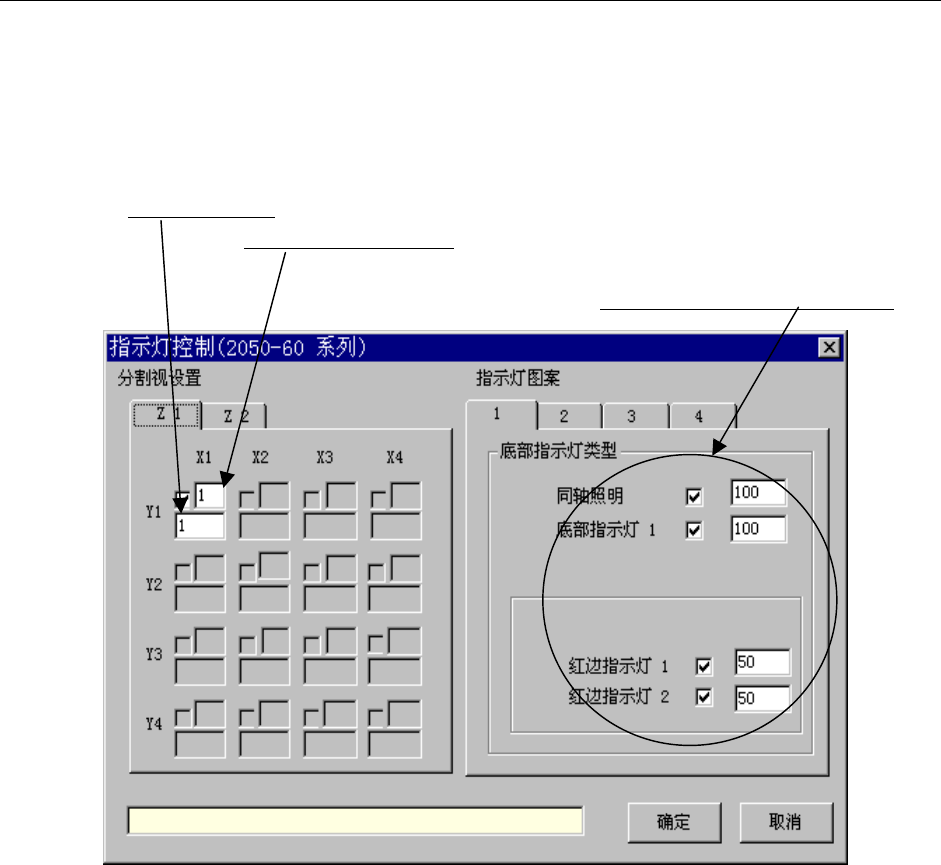
4-3-7-6 指示灯控制(照明控制数据)
可指定用VCS识别时的照明控制(下图为不进行分割识别时的例子)。
① 分割视野设置
在进行分割识别时,显示其等分数(目前最大为 4 次)。
“Z2”现在没有使用。
照射图案的编号
(照射图案有多个时,指定其编号)。
分割识别时的识别顺序
。
画面显示因照明的种类而不同。
图 4.3.7.6.1 照明控制数据
② 指示灯图案
可设置各 LED 的亮度。
亮度以 100 为基准、可设置 20(暗)~200(明)范围内的亮度,一般请使用初始值。