KE-2000R_InstructionManual_C_Rev00说明.pdf - 第70页
第 1 部 基本编 第 1 章 设备概要 1- 49 1-2-2-3 跟踪球 主机装有跟踪球,为标准配置。 图 1-2-2-3 跟踪球外观图 1.跟踪球中间部分的按键无效。 1-2-2-4 触摸面板(选购件) 通过该选购件,可进行触摸屏操作。 注意 注1 右按钮 左按钮
第 1 部 基本编 第 1 章 设备概要
1-
48
键名 功 能
F1
F2
F3
F4
·对其他移动地点进行选择或指定示教时得点数等。
No
·进行轴选择时,上调或下调轴的编号。
指定显示于液晶屏上的轴编号。
DEV.NAME
·进行设备选择时, 上调或下调设备的编号。
指定显示于液晶屏上的设备编号。
-X+Y
<选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
+Z+Y
<选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
<选择 Z 轴时> 用于向箭头方向移动 Z 轴。
-X+Y
<选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于按箭头方向移动光标。
-θ-X
<选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
<选择θ轴时> 用于向任意角度移动θ轴。
FAST 用于高速移动轴时。(如选中,LED 将被点亮。)
+θ+X <选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
<选择θ轴时〉 用于向任意角度移动θ轴。
-X-Y <选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
-Z-Y <选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
<选择 Z 轴时> 用于向箭头方向移动 Z 轴。
+X-Y <选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
WINDOW ·用于将显示于视屏监视器上的光标从十字状态切换到视窗状态。
PREVIOUS ·用于移动至前一个数据。
PAUSE ·用于暂停贴片追踪。
CAN7CEL ·用于取消示教时输入的数据。
NEXT ·用于移动至后一个数据。
ENTER ·用于确定示教时输入的数据。
注意
将 HOD 单元与主机连接时,请关闭主机电源。
注意
HOD 单元背面贴有磁铁,如过使软盘等靠近,有可能使数据丢失。
第 1 部 基本编 第 1 章 设备概要
1-
49
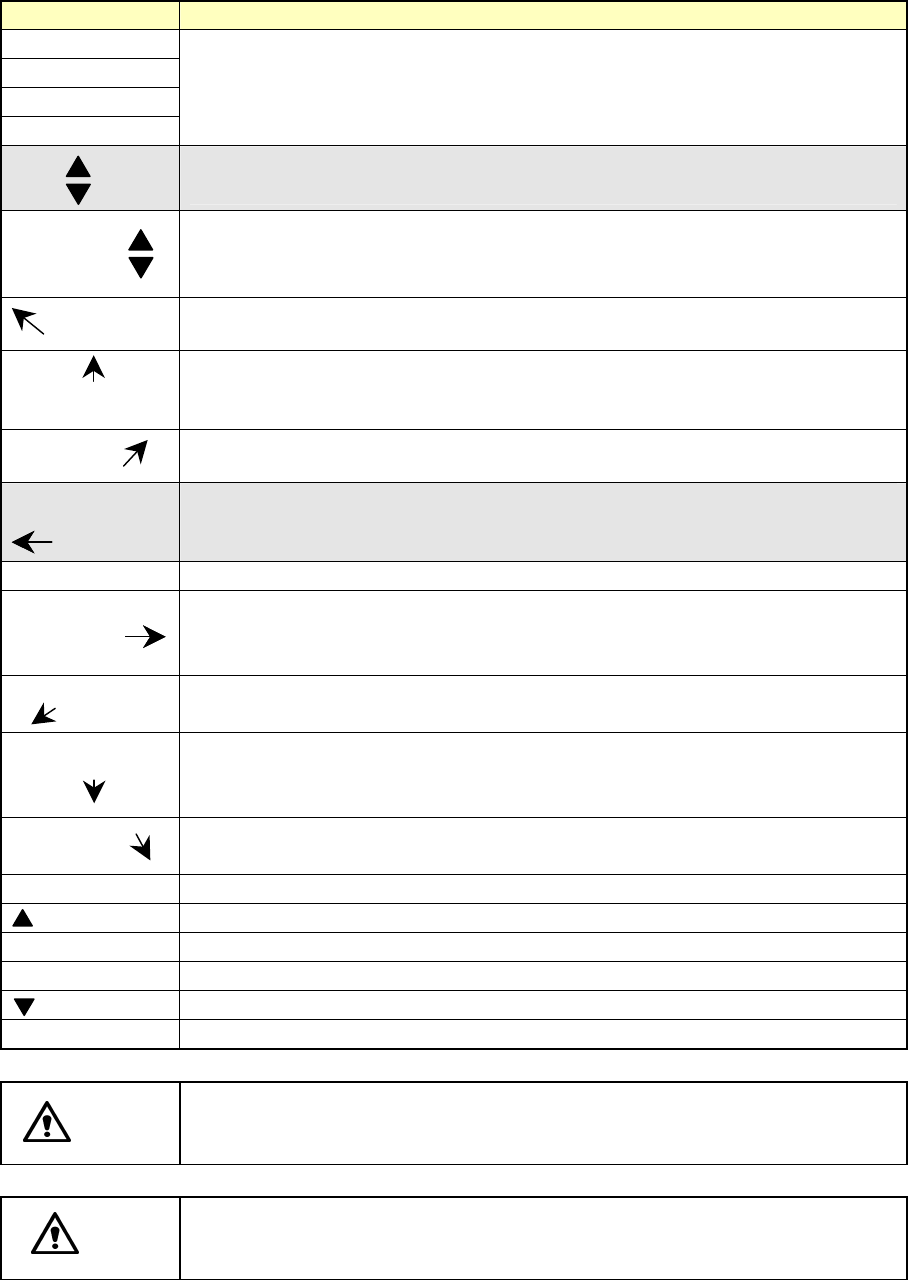
1-2-2-3 跟踪球
主机装有跟踪球,为标准配置。
图 1-2-2-3 跟踪球外观图
1.跟踪球中间部分的按键无效。
1-2-2-4 触摸面板(选购件)
通过该选购件,可进行触摸屏操作。
注意
注1
右按钮
左按钮
第 1 部 基本编 第 1 章 设备概要
1-
50
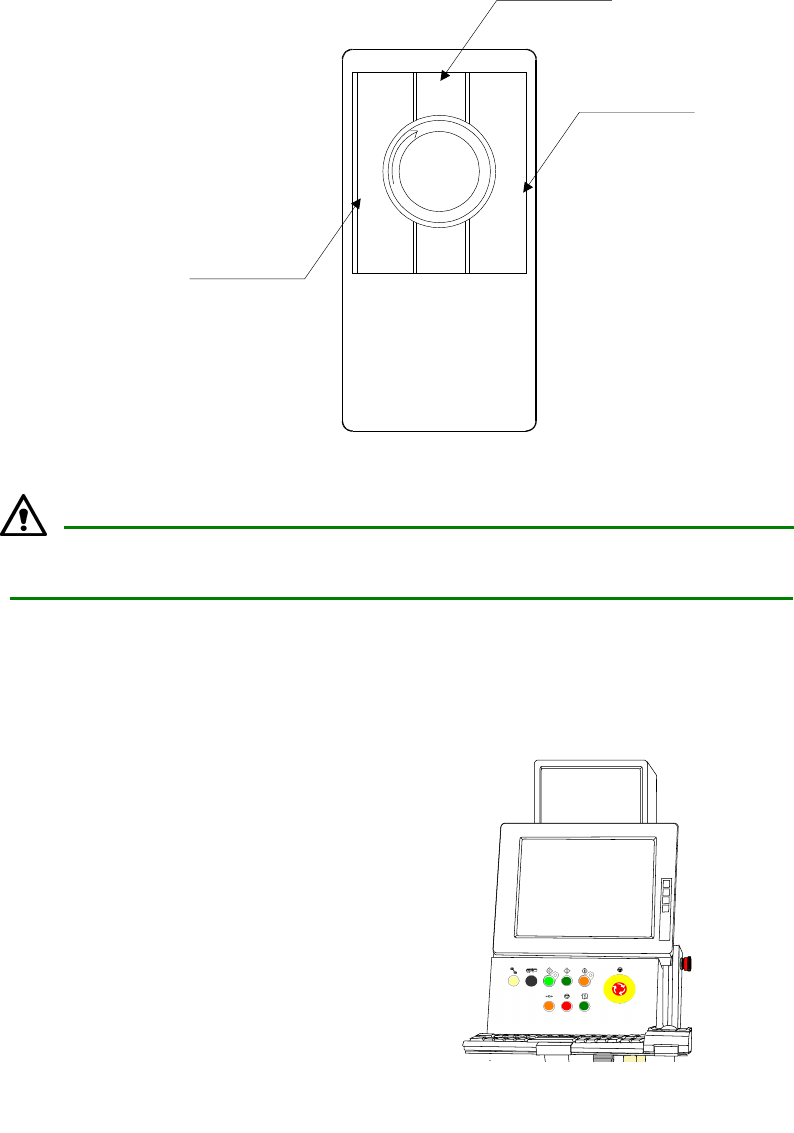
1-2-2-5 工作板
可通过主机的操作面板来控制机器的动作。
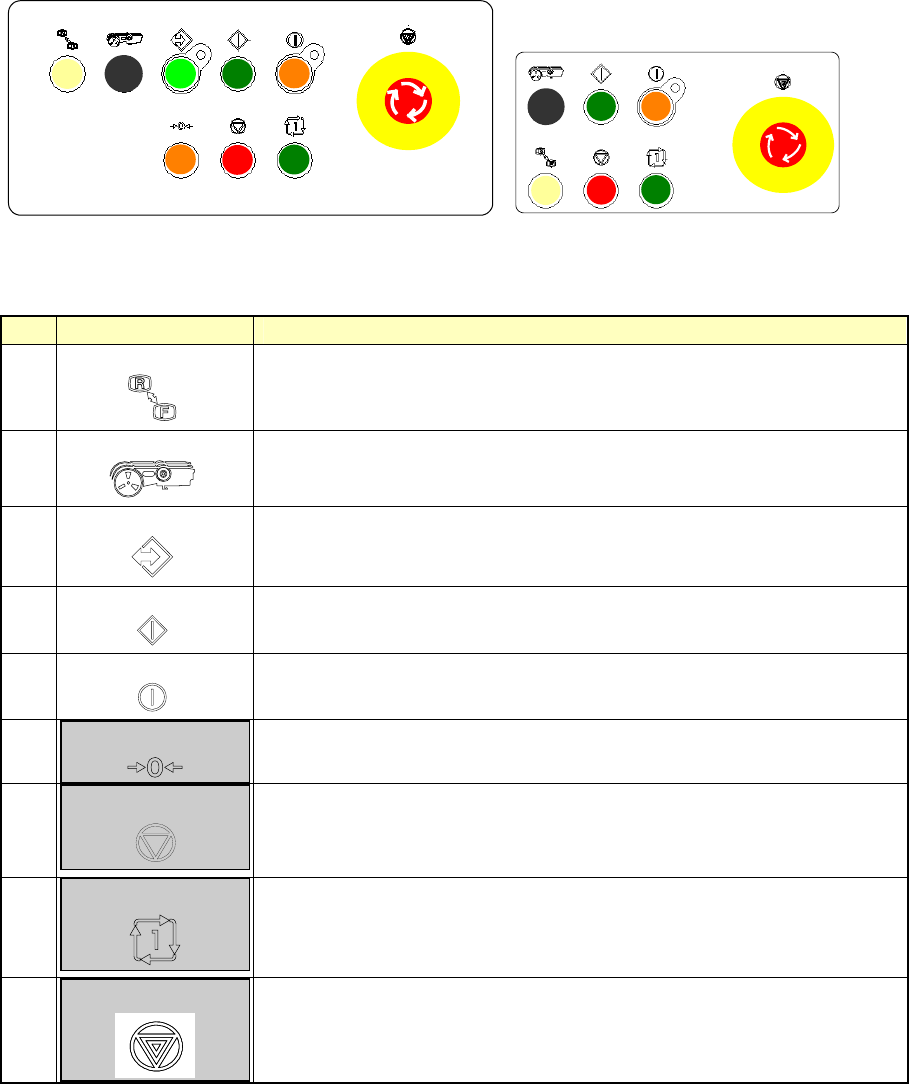
<前面> <后面>
图 1-2-2-4 工作板外观图
表 1-2-2-3 开关功能概要
No 开关名 功 能
1
KEYBOARD
·进行键盘操作的<FRONT>、<REAR>切换。
·按下该开关,则指示灯点亮。
2
FEEDER
·进行送料器单元有效/无效的切换。
·按下该开关,当指示灯点亮时为<有效>。
3
ONLINE
(联机)
·用于连接装置与 HLC(联机)。
·联机状态下指示灯点亮。
4
(START)
·进行生产或模拟生产运行时使用。
5
SERVO FREE
·用于使伺服马达(X 轴、Y 轴、Z 轴、θ轴)进入 Motor Free 状态。
·Motor Free 状态下指示灯点亮。再按一次后马达被励磁。
6
ORIGIN
·确定全轴的原点。
7
(PAUSE,STOP)
·终止生产、模拟生产时使用。按一次暂停,再按则停止。
8
SINGLE CYCLE
·一张基板生产结束后,停止生产时使用。
再按则解除该模式。
9
Emergency
·该开关用于紧急停止。当装置出现异常动作或危及人体时使用。按
下该开关后,马达及其他驱动部分停止工作,红色信号灯点亮。
按箭头方向旋转该开关即可恢复。