00196521-02_UM_X-Series_SR70x_JAP.pdf - 第278页
4 据付けと委託作業 ユーザーマニュアル SIPLACE X シリーズ 4.3 実装マシンをセットアップする ソフトウエアバージョン SR.70x.xx 以降 2011 年 1 月日本語版 278 4.3.17.3 ライン基準でマシンの位置を揃える → フォークリフトを使用して、ライ ンの空いている場所にマシンを置きます。 警告 4 マシンをゆっくりと降ろしま す。別の人が、下を見て、マシンの脚すべてが同時に床に接 触するようにすること…
ユーザーマニュアル SIPLACE X シリーズ 4 据付けと委託作業
ソフトウエアバージョン SR.70x.xx 以降 2011 年 1 月日本語版 4.3 実装マシンをセットアップする
277
マシンへの復旧不可能な損害を避けるために、実装マシンを持ち上げる
前に
、次の点にご注意
ください。
– フォーク間の距離は、800 から 900 mm の間にあること。フォークリフトの取り付け面は、
ページ 276
の図 4.3 - 29 に示されています。接触面間の最大距離は、1120mm です。マシン
フレームを変形するおそれがあるので、マシンフレームの側面部でマシンを持ち上げるた
めにフォーク間の距離を絶対に広げないこと。
→ マシンを持ち上げるとき、フォークに均等に負荷がかかるようにします。フォークと実装
マシンがしっかりと接触していると、持ち上げたときマシンが傾かないようになります。
これは、マシンの脚の取付部分を変形するおそれのある、マシンの脚への負荷の偏りも防
止します。マシンを持ち上げるとき、別の人がマシンを監視し、フォークリフトで持ち上
げるときにマシンが一方に傾かないようにすることをお奨めします。
4.3.17.2 マシン運搬時に注意しなければならない点
警告 4
マシンを運搬するとき、マシンの
すべて
の脚は、床に触れないようにします。床に触れている
と、脚が床面を引きずり障害物に衝突することになります。これにより、マシンフレームに固
定されているマシンの脚の取付部を損傷する可能性があります。
4 据付けと委託作業 ユーザーマニュアル SIPLACE X シリーズ
4.3 実装マシンをセットアップする ソフトウエアバージョン SR.70x.xx 以降 2011 年 1 月日本語版
278
4.3.17.3 ライン基準でマシンの位置を揃える
→ フォークリフトを使用して、ラインの空いている場所にマシンを置きます。
警告 4
マシンをゆっくりと降ろします。別の人が、下を見て、マシンの脚すべてが同時に床に接
触するようにすること。片側のマシンの脚が床に激しく当たると、取付部分が損傷しま
す。
4
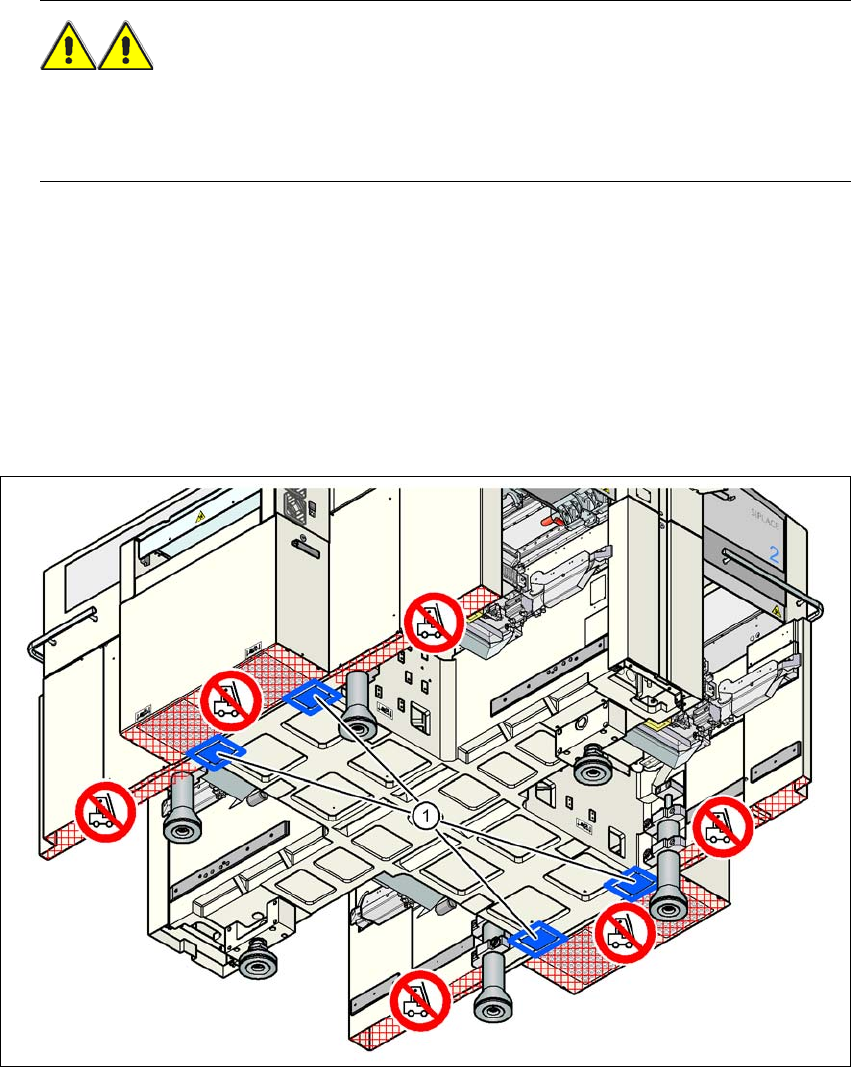
4.3.17.4 エアークッション運搬システムでマシンの位置を揃える
→ マシンフレームの下にエアークッション運搬システムのエアークッション 4 個を入れます。
→ マシンを持ち上げ、ラインに揃えます。
→ 隣のマシンの PCB コンベヤシステムからの距離をチェックします。1 mm と 3 mm の間にしま
す。
→ マシンを降ろします。
4
図 4.3 - 30 エアークッション運搬システムの接触位置
(1) エアークッション運搬システムの接触面
ユーザーマニュアル SIPLACE X シリーズ 4 据付けと委託作業
ソフトウエアバージョン SR.70x.xx 以降 2011 年 1 月日本語版 4.3 実装マシンをセットアップする
279
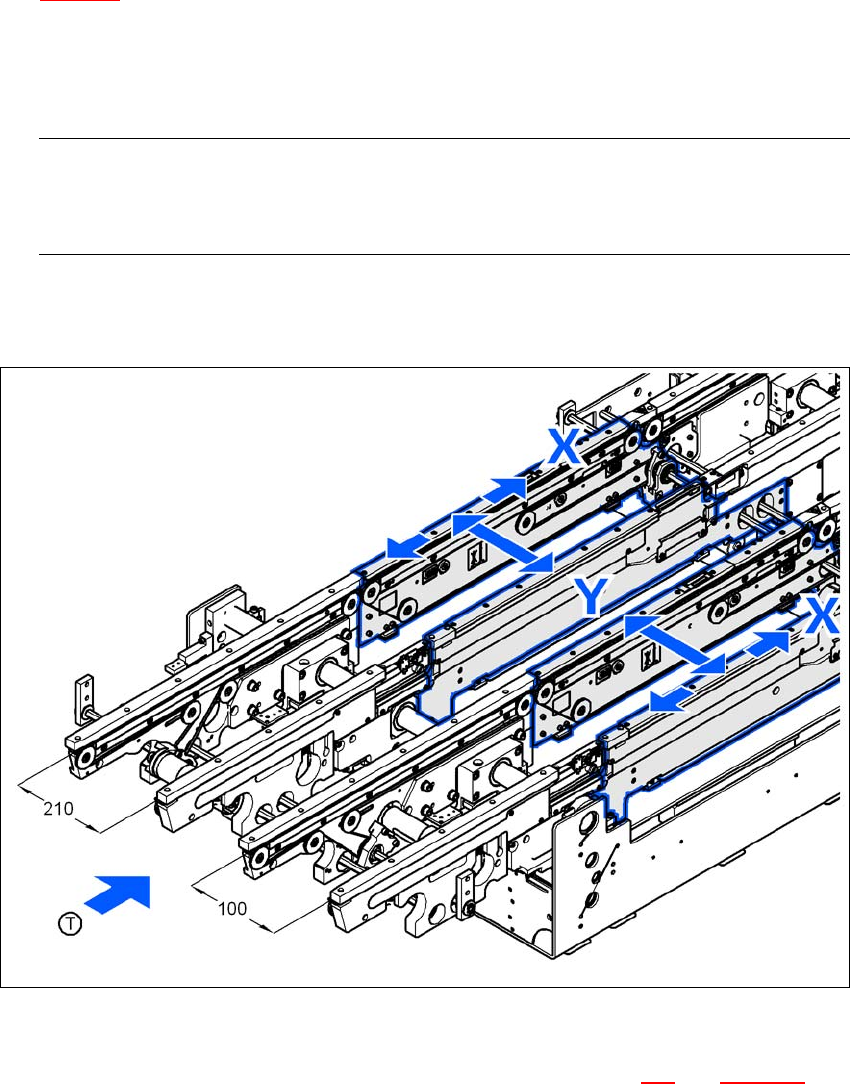
4.3.18 マシンの最終調整をおこなう
→ マシンの水準器を、実装エリア 1 の PCB コンベヤのパネル上に、XY 両方向に置きます(図
4.3 - 31
参照)。 PCB コンベヤ幅は、次のようにプリセットされています。
シングルコンベヤ 210 mm
デュアルコンベヤ、トラック 1100 mm
デュアルコンベヤ、トラック 2210 mm 4
ご注意 4
デュアルコンベヤでは、X 方向を調整するために、水準器をマシンの外側パネルにだけ置
きます。
→ PCB コンベヤベルト上端エッジと床面の距離を測定します。この距離は、800 mm、900 mm、
930 mm、950 mm のどれかです。
4
図 4.3 - 31 X および Y 方向に実装マシンを調整する
→ サイズ 36 の開放端スパナを使用して、所要の PCB 搬送高さに対して、マシンの水準器のラ
ベルがゼロ点からずれないように、調整ボルト M24x2x120 (ページ 280
の図 4.3 - 32 のア
イテム 1)を調整します。