SI-G200MK5 Operation Manual (CS).pdf - 第183页
操作編 电子零件贴装机 SI-G 200MK5 系列 1-1 15 3.2.2 基板操作 可操作确认基板的定位及操 作搬入· 搬出的单独动作, 组 合成一连贯动 。 3.2.2.1 基板位置決め操作 [ 概要 ] 操作基板定位时, 执行下列的一连贯动 作。 基板定位 : 固定板装置上升 ( 夹板 ) → 基准针下降 基板定位解除 : 基准针下降 → 固定板装 置(夹板) 下降 [ 操作顺序 ] 依顺序点击 手動操作 ( 手动操作 ) 菜…

操作編
电子零件贴装机 SI-G200MK5 系列
1-114
3.2.1.7 基板搬送状态的表示
在基板搬送画面, 用表示色表示当前的状态。
· 关于轨道皮带的表示颜色
绿色: 向搬出方向移动
白色: 停止
黄色: 向搬入方向移动
· 关于各个钮的文字颜色
黑色: 可以操作
灰色: 不能操作
装在轨道上的基板用绿色表示。
固定板上的用多孔的灰色长方形表示。
· 关于固定板、基准针、停止器、夹板的表示颜色
黄色: 表示处于上升端
白色: 表示处于下降端
· 关于安装在轨道上的下述传感器开关状态的表示
红色
LED 标记是
明亮状态: 开
灰暗状态: 关
基板搬入传感器
利用设置在基板搬入轨道入口的光学式传感器, 检测能从前装置搬送来的基板。
基板搬出传感器
利用设置在基板搬出轨道出口的光学式传感器, 检测可在后装置搬送基板。
基板待机传感器
利用设置在基板搬入轨道出口的光学式传感器, 检测可在装着轨道搬送基板。
基板确认传感器
利用设置在基板装着轨道的装着位置的光学式传感器, 检测是否可能从搬入轨道到装着轨道搬送
基板, 固定板可以上升。
基板有无传感器
利用设置在基板装着轨道的装着位置的光学式传感器,检测固定板可以上升,可以矫正装着基板。
基板确认通过传感器
利用设置在基板搬出轨道入口的光学式传感器, 检测从装着轨道搬送来的基板。
基板搬入开始传感器
利用设置在基板装着输送带的装着位置的光学式传感器, 检出从搬入输送带搬送来的基板, 开
始搬入在前装置待机的基板。
基板减速传感器
利用设置在基板搬出输送带中间的光学式传感器, 检出从装着位置搬送来的基板, 输送带速度开
始减速。
操作編
电子零件贴装机 SI-G200MK5 系列
1-115
3.2.2 基板操作
可操作确认基板的定位及操作搬入· 搬出的单独动作, 组合成一连贯动。
3.2.2.1 基板位置決め操作
[概要]
操作基板定位时, 执行下列的一连贯动作。
基板定位
: 固定板装置上升 (夹板) → 基准针下降
基板定位解除
: 基准针下降 → 固定板装置(夹板) 下降
[操作顺序]
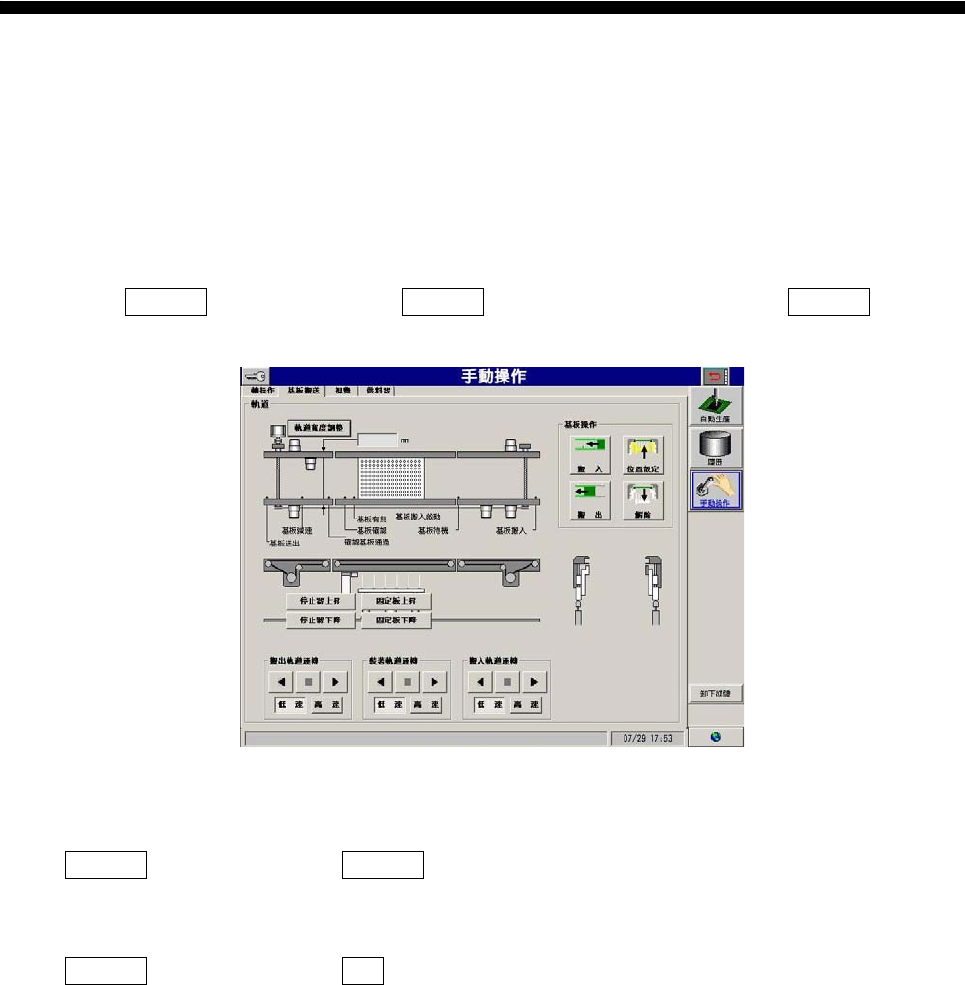
依顺序点击 手動操作
(手动操作) 菜单 → 基板搬送 (基板搬送) 标签,会显示以下的 基板搬送
(基板搬送) 画面。
图 3.2.2.1 手動操作- 基板搬送 ( 手动操作- 基板搬送) 操作
基板定位时
点击 基板操作
( 基板操作) 框内的 位置設定 ( 位置设定) 钮, 开始一连贯的定位动作, 以便在
装着位置内固定基板。
解除基板定位时
点击 基板操作
( 基板操作) 框内的 解除 ( 解除) 钮, 开始一连贯的解除动作, 使基板成为可搬
出状态。
操作編
电子零件贴装机 SI-G200MK5 系列
1-116
3.2.2.2 基板搬入· 搬出的操作
[概要]
操作基板搬入· 搬出时, 执行下列一连贯的动作。
搬入操作: 停止器上升 → 将基板由搬入轨道搬送至搬出轨道 → 停止器下降
搬出操作: 解除基板定位 → 搬出基板
[操作顺序]
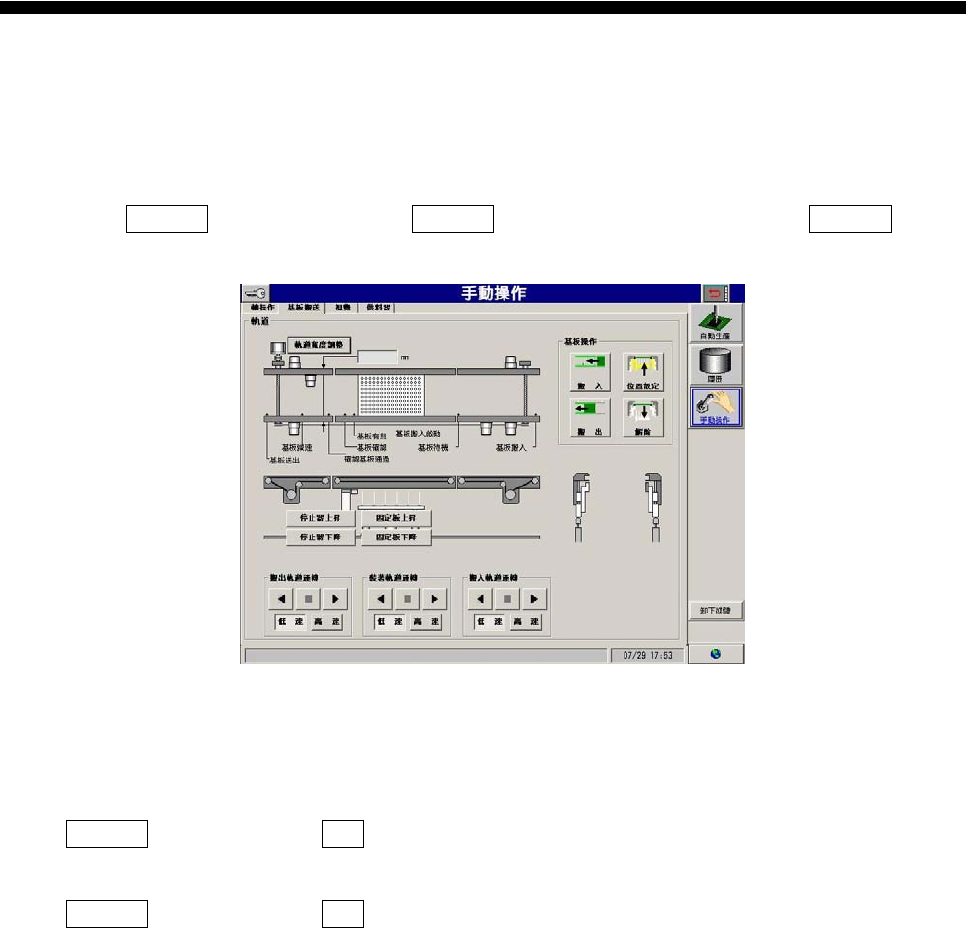
依顺序点击 手動操作
( 手动操作) 菜单 → 基板搬送 ( 基板搬送) 标签,会显示以下的 基板搬送
( 基板搬送) 画。
图 3.2.2.2 手動操作- 基板搬送 ( 手动操作- 基板搬送) 画面
要执行基板搬入操作
点击 基板操作
( 基板操作) 框内 搬入 ( 搬入) 钮。执行一连贯的基板搬入动作并停止。
要执行基板搬出操作
点击 基板操作
( 基板操作) 框内 搬出 ( 搬出) 钮。执行一连贯的基板搬出动作并停止。