SI-G200MK5 Operation Manual (CS).pdf - 第255页
操作篇 电 子零件 贴装 机 SI-G200MK5 系列 1-187 1.3.3 Pick Up Pick Up 表示吸着补正数据。吸着补正数据收集了吸嘴 从零件供料器吸着零件时所需要的数 据。 图 1.3 .3-1 Pick Up 画面 (高速贴装头) (1) 贴装头类型 复数个类型的贴装头可使用时,选择 设定零件信息对象的贴装头 信息。不显示不能够选择的贴装 头。 (2) 吸着补正 XY 欲吸着的位置为零件中心以外时,输 入由零件中…

操作篇
电子零件贴装机 SI-G200MK5 系列
1-186
零件识别错误时, 设定再次执行识别的次数。即使反复至指定次数亦为认
识错误时, 将其零件废弃, 再次开始吸着零件动作。
设定范围:0~9
(10) 吸嘴停留时间(吸着时)
为确实吸着动作, 输入在吸着位置
(下降位置) 停止的时间。
单位:msec
设定范围:0~9999
(11) 吸嘴停留时间(贴装时)
为确实吸着动作, 输入在贴装位置
(下降位置) 停止的时间。
单位:msec
设定范围:0~9999
(12) 吸嘴
ID
选择使用吸嘴编号。(最多 16 种)
(13) 加速度模式
ID
选择使用的加速度模式 ID。加速度模式取决于机器数据。
(14) 全体超驰比率
输入全体范围的超驰比率。

操作篇
电子零件贴装机 SI-G200MK5 系列
1-187
1.3.3 Pick Up
Pick Up 表示吸着补正数据。吸着补正数据收集了吸嘴从零件供料器吸着零件时所需要的数据。
图 1.3.3-1 Pick Up 画面 (高速贴装头)
(1) 贴装头类型
复数个类型的贴装头可使用时,选择设定零件信息对象的贴装头信息。不显示不能够选择的贴装头。
(2) 吸着补正 XY
欲吸着的位置为零件中心以外时,输入由零件中心偏移吸着位置的XY方向的补正量。
X 为右方向+ 、左方向- 。Y 为上方向+ 、下方向-
单位:mm
设定范围:-999.999~999.999
(3) 吸着高度补正 H(MC)
输入机械供料器用的吸着位置的高度方向的补正值。上方向为正方向,下方向为负方向。
单位:mm
设定范围:-999.999~999.999
(4) 吸着高度补正 H(IC)
输入智能供料器用的吸着位置的高度方向的补正值。上方向为正方向,下方向为负方向。
单位:
mm
设定范围:-999.999~999.999
操作篇
电子零件贴装机 SI-G200MK5 系列
1-188
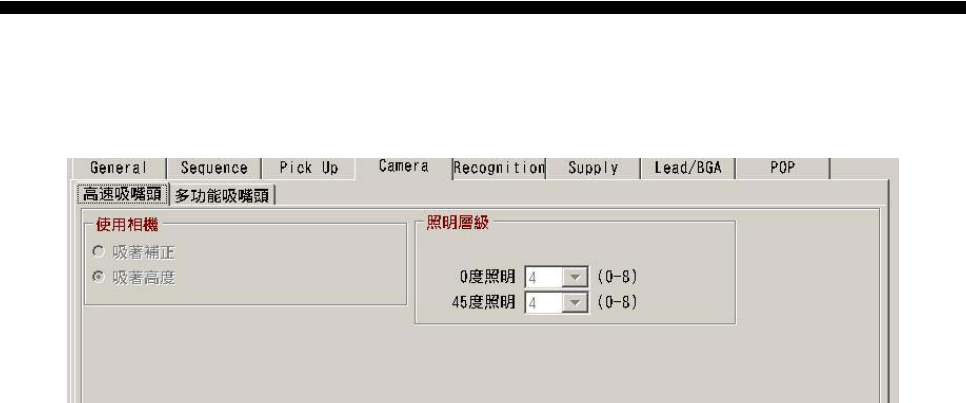
1.3.4 Camera
Camera 表示相机数据以及吸着确认方活 。
1.3.4.1 高速贴装头
图 1.3.4-1 Camera 画面 (高速贴装头)
(1) 贴装头类型标签
复数个类型的贴装头可使用时,选择设定零件信息对象的贴装头信息。不显示不能够选择的贴装头。
(2) 使用相机
执行移动·固定相机的选择。
(3) 照明方式
选择照明的亮度方式。此设定按 相機 (相机)标签里被选择的使用相机来判断是固定相机照明还是零件相机照
明。
装在零件的贴装贴装头里的零件相机因机器类型而不同。
[使用相机是移动相机的场合]
0 度照明:零件反射照明
45 度照明:45 度照明
[使用相机是固定相机的场合]
上层照明:上层的照明
中层照明: 中层的照明
下层照明: 下层的照明
[用透射照明识别的场合]
透射照明
设定范围:0~8※
※ 不能把全部的亮度方式设定为 0。