CP7 Series Level3 Tutorial Manual.pdf - 第67页
2.3.5 Middle OT Sensor 1. The middle OT sensor dog should be adjusted to trigger the sensor when the Z-axis is at ZØ + 250 ± 50 pulses. 2 . Confirm the position of the dog using the following commands: [MAINTENANCE] → [I…
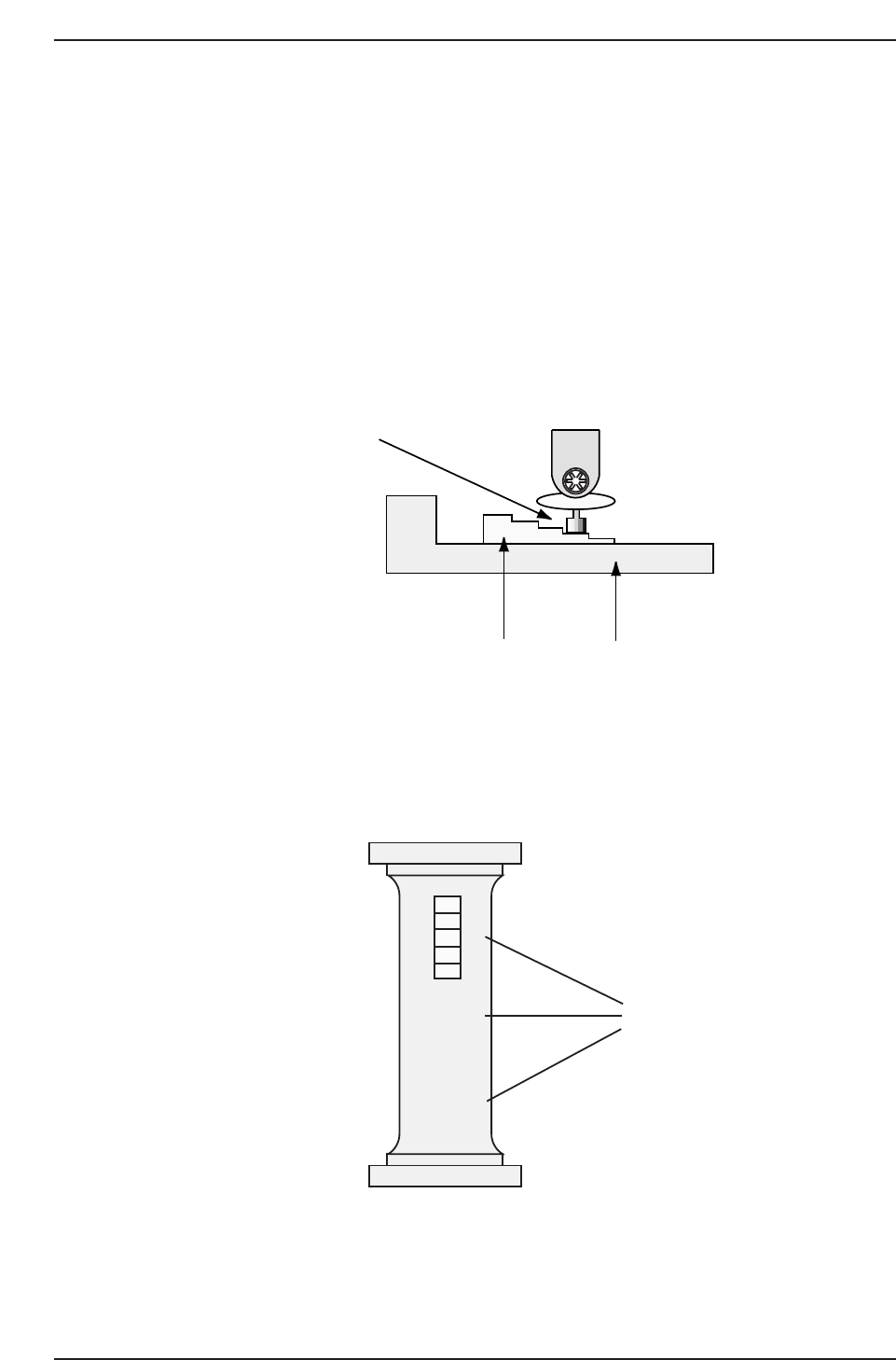
2.3.4 ZØ Measurement
1. Activate the station 9 solenoid valve with the cam at 0°.
[MAINTENANCE] → [I/O CHECK] → [STANDARD] → [Y034 PLACE
SOL ENGAGED].
2. Mount the CP-7-series ZØ adjustment jig on the center of the main
clamper. Attach the nozzle jig to Head A no. 1. Then inch the XY-table
to the placing position at station 9.
3. With the cam angle at 180°, raise the Z-axis until the nozzle jig just comes
into contact with the -0.3 mm spacer. Record the motor pulse count.
4. Repeat the adjustment with the spacer at the middle and at the front of
the bar jig as shown below. Take the average of the three values and
register the position in machine calibration data using the following
commands:
[MAINTENANCE] → [CALIBRATION] → [PLACING REF] → [SET].
Note: If no jig is available, use a fiducial plate jig and add 1000 pulses to the resultant value.
0
-0.1
-0.2
-0.3
-0.4
X
X
X
Measure at these
three points
CP7T32011
CP7T32010
0.3 mm
Nozzle jig (Z9326DCPJ4130)
Z adjustment jig (Z9530PJ1060/Z5313WPJ0180)
Chapter 2 2.3 Z-Axis Calibration Data Adjustments
Edition 2.0 2-10 CP-7-series Level 3 Tutorial

2.3.5 Middle OT Sensor
1. The middle OT sensor dog should be adjusted to trigger the sensor when
the Z-axis is at ZØ + 250 ± 50 pulses.
2. Confirm the position of the dog using the following commands:
[MAINTENANCE] → [I/O CHECK] → [STANDARD] → [X05E MAIN-
LIFTER MIDDLE OT].
Chapter 2 2.3 Z-Axis Calibration Data Adjustments
Edition 2.0 2-11 CP-7-series Level 3 Tutorial

Notes:
Chapter 2 2.3 Z-Axis Calibration Data Adjustments
Edition 2.0 2-12 CP-7-series Level 3 Tutorial