Chapter3_Repair_Guide.pdf - 第302页
Model DECAN Series Company SAMSUNG TECHWIN Module 3.17 Y -FRAME V ersion 01 Tit le Y 轴噪音判定标准 Page 3-17-6 Note [Y 轴噪音判定标准 ] 低频噪音 收集 Y 轴 T o rque Command Data ① 将示波器 CH1 、 CH2 连接到 Motor Driver FY1 和 FY2 ② 示波器保存 Data 中,…
Model
DECAN Series
Company
SAMSUNG TECHWIN
Module
3.17 Y-FRAME
Version
01
Title
LINEAR SCALE FIRMWARE UPGRADE
Page
3-17-5
Note
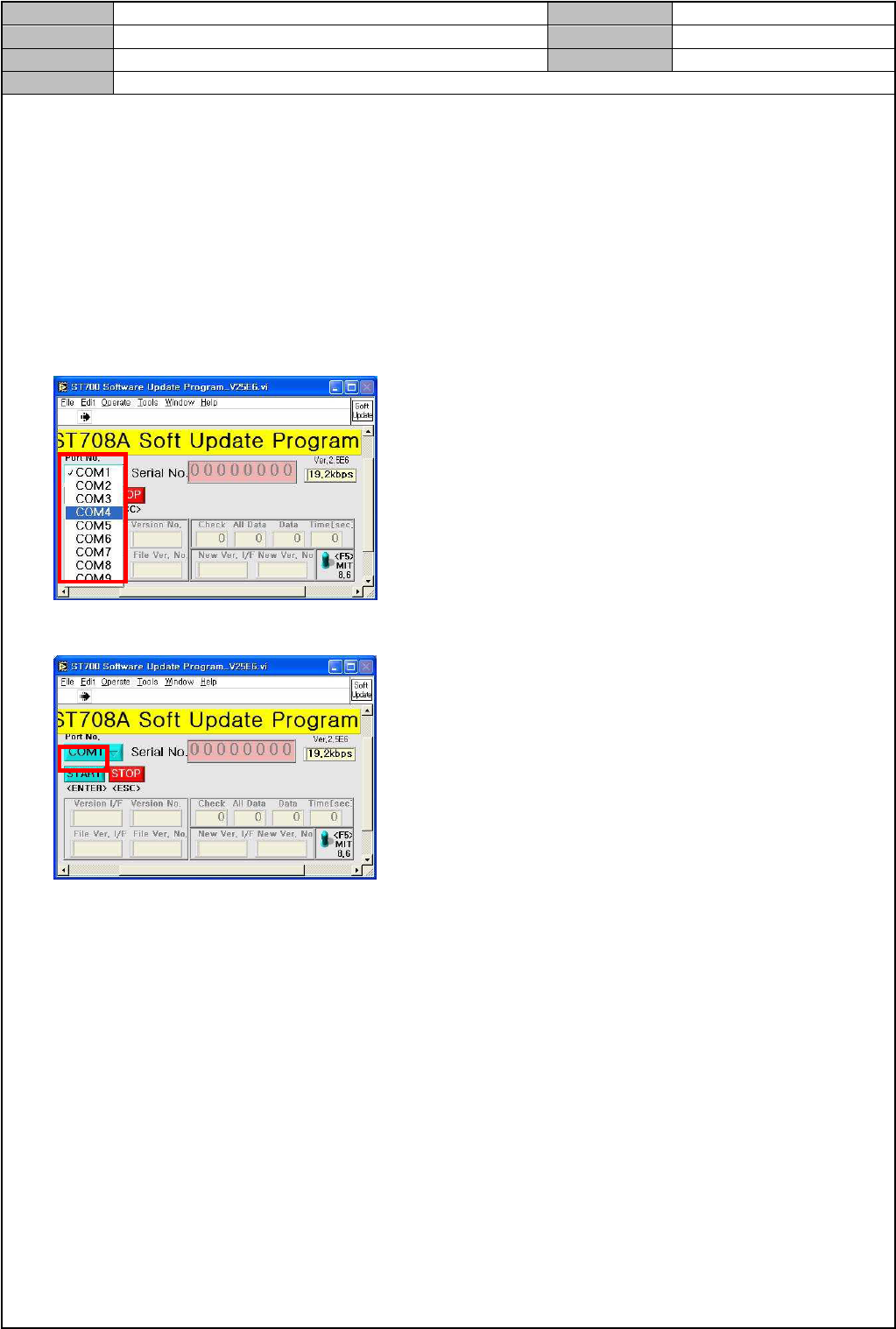
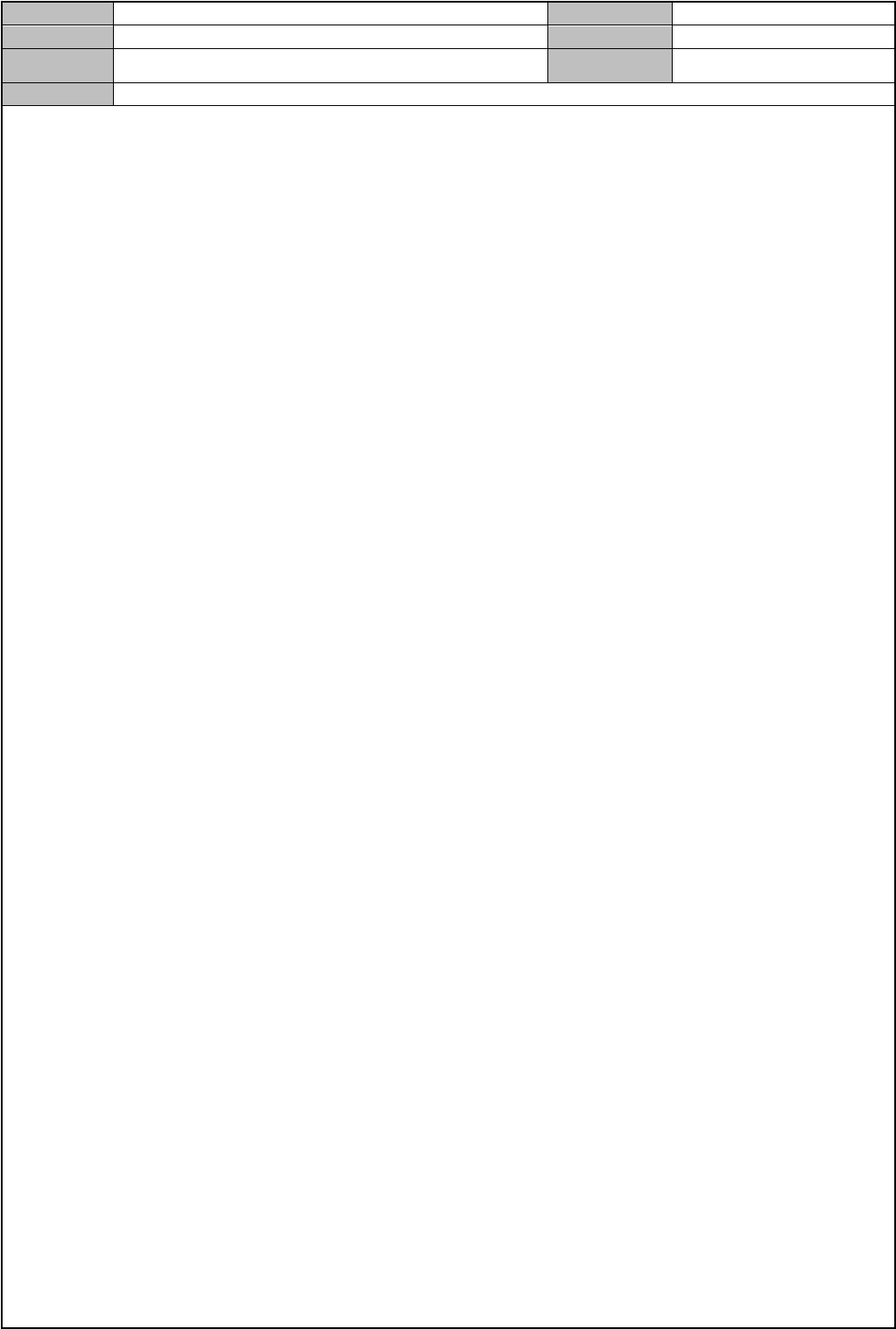
[LINEAR SCALE FIRMWARE UPGRADE]
1. 将设定夹具的 USB 电缆连接到笔记本电脑
2. 在<电脑属性> - <硬件> - <设备管理器>的<PORT(CPM&LPT)>,确认已连接的设定夹具的端口
3. 执行 ST708A Soft Upgrade Program
4. 选择已确认的端口
5. 点击<Start>
6. 正常完成升级后,取出夹具,重启设备
Model
DECAN Series
Company
SAMSUNG TECHWIN
Module
3.17 Y-FRAME
Version
01
Title
Y轴噪音判定标准
Page
3-17-6
Note
[Y 轴噪音判定标准]
低频噪音
收集 Y 轴 Torque Command Data
① 将示波器 CH1、CH2 连接到 Motor Driver FY1 和 FY2
② 示波器保存 Data 中,在 Setups 文件夹打开 SM411Y_OSC_LF_ROO.set
③ 在示波器,执行 Excel 程序,并启用<TekXL triggered Captures>窗口
④ 使用 Excel 程序的<TekXL triggered Captures>收集数据时,在设备执行 Standard Running
Program 并包含发生异常音的区间
分析 Y 轴 Torque Command Data
① 执行 MATLAB
② 分析示波器内 Excel 程序的<TekXL triggered Captures> Data
③ 分析后,确认是否算出如下 14 个值
max_a
max_af_A
max_af_B
max_af_C
max_af_D
max_af_E
max_af_F
rms_a
rms_a_A
rms_a_B
rms_a_C
rms_a_D
rms_a_E
rms_a_F
④ 判定噪音时,确认 rms_af_B,rms_af_C,rms_af_E,rms_af_F 值
⑤ 标准
rms_af_B(Y1 电机和 Y2 电机之和) > 0.076V
rms_af_C(Y1 电机或 Y2 电机) > 0.035V
rms_af_E(Y1 电机或 Y2 电机) > 0.018V
rms_af_F(Y1 电机或 Y2 电机) > 0.023V
高频噪音
用 Microphone Power Supply 测定噪音后,用示波器分析波形
标准(M1,M2,M3 的 Max 值):BAND H[4000~7000
㎐] Peak 值 > 0.008V
Model
DECAN Series
Company
SAMSUNG TECHWIN
Module
3.17 Y-FRAME
Version
01
Title
组装FLAT CABLE
Page
3-17-7
Note
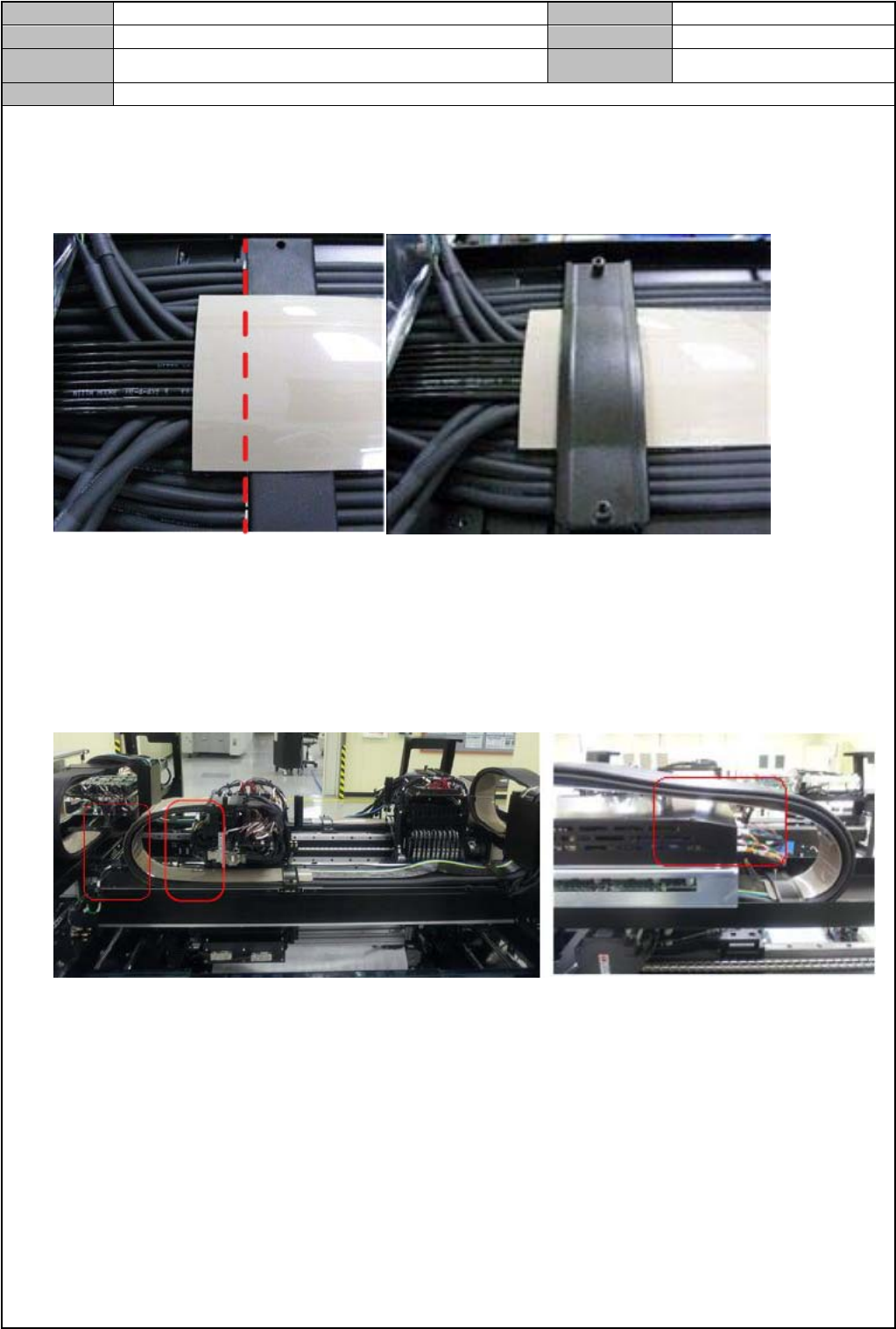
[组装 FLAT CABLE]
1. 组装时,电缆上表示的标记线与 Y Flat Cable Guide Rubber 的末端保持平行
*组装时,Flat Cable 的编号标签进入到 Guide 的 Rubber 内侧
2. 将 Y 轴 Gantry 推尽到- Limit 后,确认 Y 轴 Flat Cable Mat 与 Z AMP Cover 有无干扰
3. 将 X 轴 Gantry 推尽到- Limit 后,确认 Flat Cable Mat 与其他模块有无干扰
4. 确认 X 轴 Head 部左侧电缆与 XY-Duct 的 Guide Mat 之间有无干扰