X3_X4_Series machine.pdf - 第128页
3 Technical data User manual SIPLACE X-Series 3.7 Placement heads Software Version SR.601.xx 11/2005 US Edition 128 3.7.3 12-segment Collect&Place hea d for high-speed placeme nt 3 Fig. 3.7 - 7 12-segment Collect&…
User manual SIPLACE X-Series 3 Technical data
Software Version SR.601.xx 11/2005 US Edition 3.7 Placement heads
127
3.7.2.4 Technical data
3
*) Smaller components, e.g. 01005, available on request
Please note that the component range that can be placed is also affected by the pad geometry, the cus-
tomer-specific standards and the packaging tolerances.
3
3
3
3
3.7.2.5 Sensor for the component reject bin
PLEASE NOTE 3
If a 20-segment Collect&Place head is used, then the sensor for the component reject bin is
absolutely essential. (See also section 7.2 from page 410 onwards.)
Range of components 0201
*)
to 2220, Melf, SOT, SOD
Component specification
Max. height
Min. lead pitch
Min. ball pitch
Min. ball diameter
Min. dimensions
Max. dimensions
Max. weight
4 mm
0.3 mm
0.4 mm
0.2 mm
0.2 x 0.2 mm²
6 x 6 mm²
1 g
Programmable set-down force, variable increments 2.0 ± 0.5 N
3.5 ± 1 N
4.5 ± 1 N
Nozzle types 10xx, 11xx, 12xx
X/Y accuracy ± 41 µm/3 σ, ± 55 µm/4 σ
Angular accuracy ± 0.5°/3 σ, ± 0.7°/4 σ
3 Technical data User manual SIPLACE X-Series
3.7 Placement heads Software Version SR.601.xx 11/2005 US Edition
128
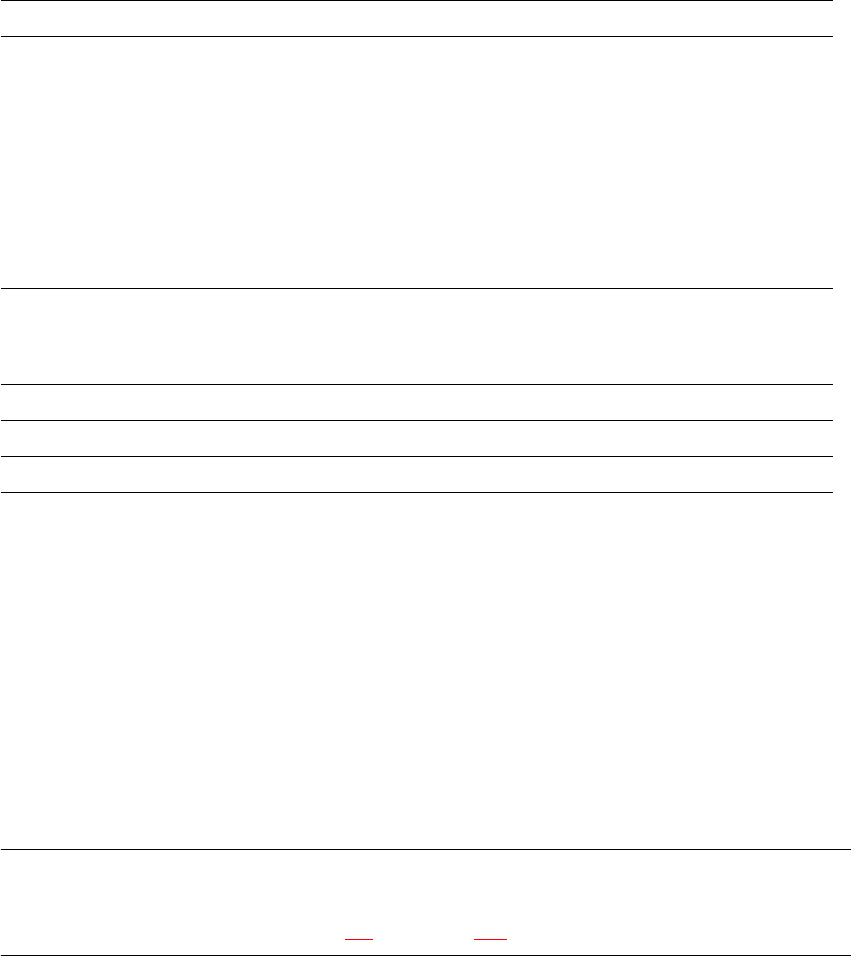
3.7.3 12-segment Collect&Place head for high-speed placement
3
Fig. 3.7 - 7 12-segment Collect&Place head - Function groups, part 1
3
(1) Vacuum generator
(2) Turning station, DP axis
(3) Star with 12 sleeves, star axis
(4) Forced air valve
(5) Silencer
User manual SIPLACE X-Series 3 Technical data
Software Version SR.601.xx 11/2005 US Edition 3.7 Placement heads
129
3
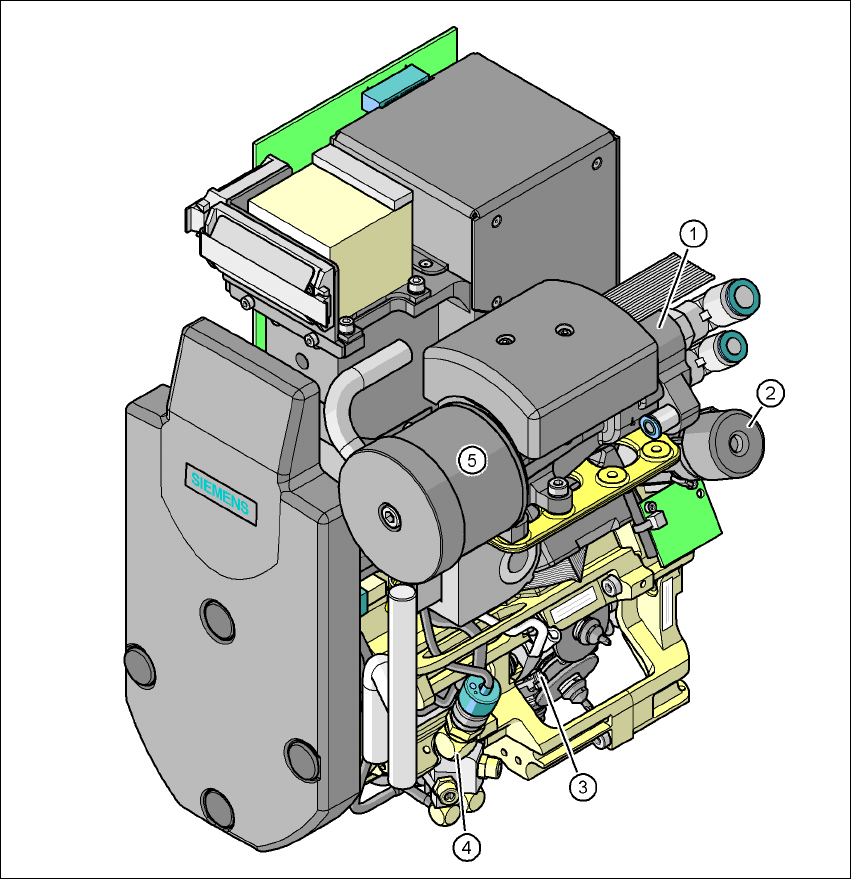
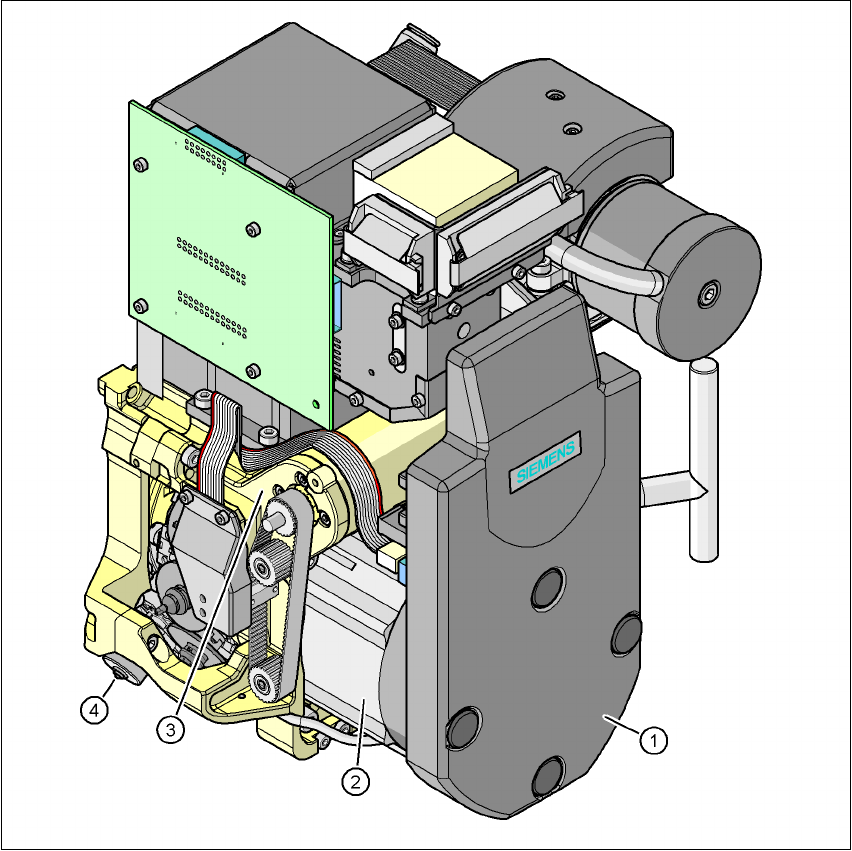
Fig. 3.7 - 8 12-segment Collect&Place head - Function groups, part 2
3
(1) Intermediate distributor board (beneath the cover)
(2) Star drive - DR motor
(3) Z axis motor
(4) Valve adjustment drive
(5) C&P component camera, type 28 (18 x 18) digital or type 29 (27 x 27) digital, high resolution
3.7.3.1 Description
The 12-segment Collect&Place head works on the Collect&Place principle. This means that,
within each cycle, twelve components are picked up by the placement head, are optically centered
on the way to the placement position and are rotated into the required placement angle. They are