YV180X Service_J.pdf - 第101页
JSD8013110 サービスマニュアル 第 4 章 4- 45 マ シ ン 調 整 モ ー ド 4 3.4.3 カメラスケール 移動カメラスケールは画像処理パラメータの一つで、1 画素の実際の寸法を 表します。このスケールに基づいて移動カメラで基板マークが認識されます ので、正確に調整しておく必要があります。 1 基板を用意します。 データベースに登録済みで寸法規格の正確なフィデューシャルマークをも つ基板を用意してください。 参考 …

JSD8013110
サービスマニュアル
第
4
章
4-
44
マ
シ
ン
調
整
モ
ー
ド
4
q
VR5 まで調整したら、[ENTER] キーを押して終了します。
この調整では保存するマシンデータはありません。
w
ライトアジャスターを取り除きます。
画面の指示に従って基板クランプを解除し、ライトアジャスターを取り除
いてくさい。
JSD8013110
サービスマニュアル
第
4
章
4-
45
マ
シ
ン
調
整
モ
ー
ド
4
3.4.3 カメラスケール
移動カメラスケールは画像処理パラメータの一つで、1 画素の実際の寸法を
表します。このスケールに基づいて移動カメラで基板マークが認識されます
ので、正確に調整しておく必要があります。
1
基板を用意します。
データベースに登録済みで寸法規格の正確なフィデューシャルマークをも
つ基板を用意してください。
参考
一般的に円形マークは他の形状に比べて寸法精度が優れていますので、円形マーク(例えば、
直径1mmの忠実反射円形マーク)を勧めます。この調整作業ではドーナツ形状は適しません。
YAMAHAでは、反りや変形のない調整専用ガラス基板を使用しています。より正確な調整を
行いたいときは、このガラス基板 (別売り) の使用をお勧めします。
2
マークのデータベース登録No. を確認します。
「2/1/D1 基板データ切替」で調整に使用する「基板名」、続いて「マーク
情報」を選択実行します。「マーク情報」が表示されますので、マーク
データベース番号をメモしてください。
(調整専用ガラス基板のマークのデータベース番号は 281 です。)
46435-C0-00
<<<アプリケーション>>> 2/データ/M
<<モード>> 1/データ編集
編集:マーク情報
153
基板 : ABC
マーク名称
CIRCLE_1.0_Cu
編集項目
データベース番号
マーク種別 情報
コメント
No.
1
:
:
v
3
マークデータベースの登録内容を確認します。
1. 基板データの「マーク情報」を閉じて、「2/3/A1 マークデータベー
ス」を選択実行します。
2. Step 2でメモしたデータベース番号の登録内容を確かめます。
[Tab]→[F4] キーを押してサブ画面を「マーク形状情報」に切り替え
て、「マーク外形」が正確であることを確認してください。
(調整専用ガラス基板のマークの外形は 0.5mm です。)
46436-C0-00
<<<アプリケーション>>> 2/データ/M
<<モード>> 3/データベース
編集:マークデータベース
コメントマーク名称
CIRCLE_1.0_Cu
No.
153
マーク形状情報
編集項目
マーク外形
:
:
1.00
JSD8013110
サービスマニュアル
第
4
章
4-
46
マ
シ
ン
調
整
モ
ー
ド
4
3. [F4]キーを押してサブ画面を「画像処理情報」に切り替えて、「マーク
検出範囲」が4.00mm に設定されていることを確認します。
46437-C0-00
<<<アプリケーション>>> 2/データ/M
<<モード>> 3/データベース
編集:マークデータベース
コメントマーク名称
CIRCLE_1.0_Cu
No.
153
画像処理情報
編集項目
マーク検出範囲 mm
:
:
4.00
4
[F6] キーを押して、補助調整画面を開きます。
マークが確実に認識できることを確認するため、補助調整コマンドを使い
ます。
5
基板をコンベア上に固定します。
補助調整画面の「基板固定」コマンドを選択実行すると「コンベアユニッ
ト」メニューが開きますので、基板幅やロケートピンなどを操作して基板
をコンベア上に固定してください。 (基板の固定方法についてはオペレー
ションマニュアルをご覧ください。)
軸移動範囲に手などを入れるときは、必ず非常停止状態にしてください。
6
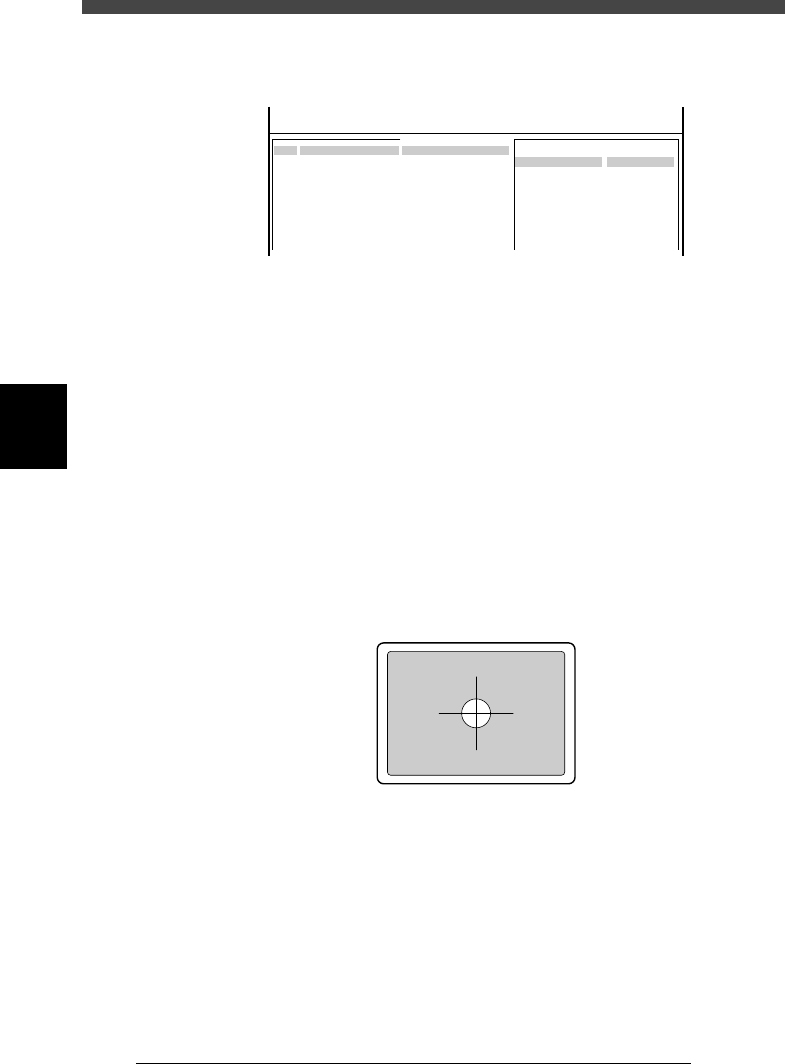
非常停止を解除し、マーク位置をティーチングします。
「マークティーチング」コマンドでYPU のジョイスティックを操作して、
ビジョンディスプレイのクロスカーソルにマークの中心を合わせてくださ
い。
42417-C0-00
7
「マーク認識テスト」コマンドを実行します。
マークを認識できた場合は現在のパラメーター設定は適切です。
「2/3/C0 データ保存、終了」して、次のステップに進んでください。
エラーが発生したときは、「適正値検索」コマンドでパラメータの適正化、
2 値化レベルのしきい値などを調整してください。(詳細は、マウンター
のオペレーションマニュアルをご覧ください。)