YV180X Service_J.pdf - 第45页
JSD8013110 サービスマニュアル 第 3 章 3- 9 3 マ シ ン デ ー タ 編 集 モ ー ド 2 . 5 R 絶対精度補正 「ヘッド」サブメニューから「R 絶対精度補正」を選択すると、下図の画面 が開きます。ここでは、部品を搭載するときの各ヘッドの R 軸(ノズル回転 軸)の角度補正値を確認できます。搭載角度 0度を基準として、1 8 0 度、 9 0 度、- 9 0 度での角度補正値が入力されています。0度での値は常…
サービスマニュアル
第
3
章
3-
8
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
3
JSD8013110
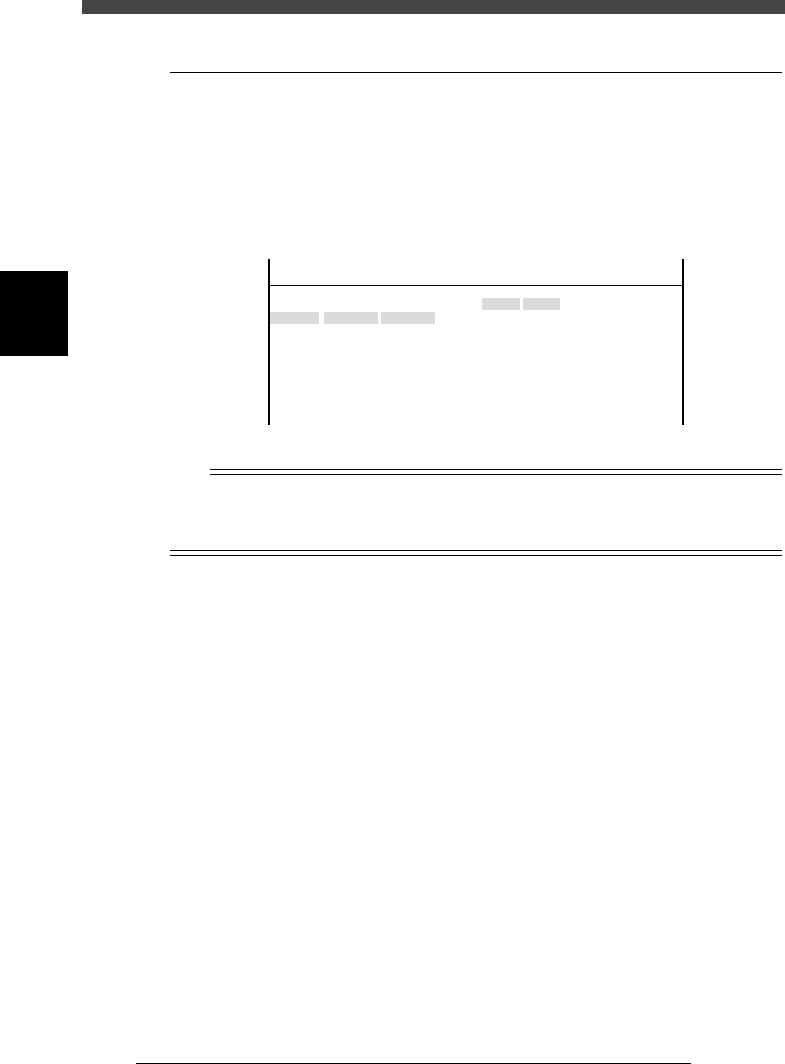
2.4 ノズル偏心補正
「ヘッド」サブメニューから「ノズル偏心補正」を選択すると、下図の画面
が開きます。ここには、ノズル角度が同じあっても、部品認識をする高さと
部品搭載をする高さでノズル中心位置がずれてしまう場合のオフセット量が
入力されています。(単位は mm)
■ ノズル偏心補正画面
46306-D8-00
ティーチユニット 速度
---- ----
ヘッド番号
ヘッド 1A
ヘッド 2A
ヘッド 3A
ヘッド 4A
ヘッド 5A
ヘッド 6A
ヘッド 7A
ヘッド 8A
対象
ノズル偏心補正
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
Y
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
X
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
n
要点
ノズル偏心補正は、AMF (オートマウントフィードバック) やAMF(オートマウントフィード
バック)調整実行すると、自動調整されます。AMFについては、別冊の「AMF オペレーショ
ンマニュアル」をご覧ください。
JSD8013110
サービスマニュアル
第
3
章
3-
9
3
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
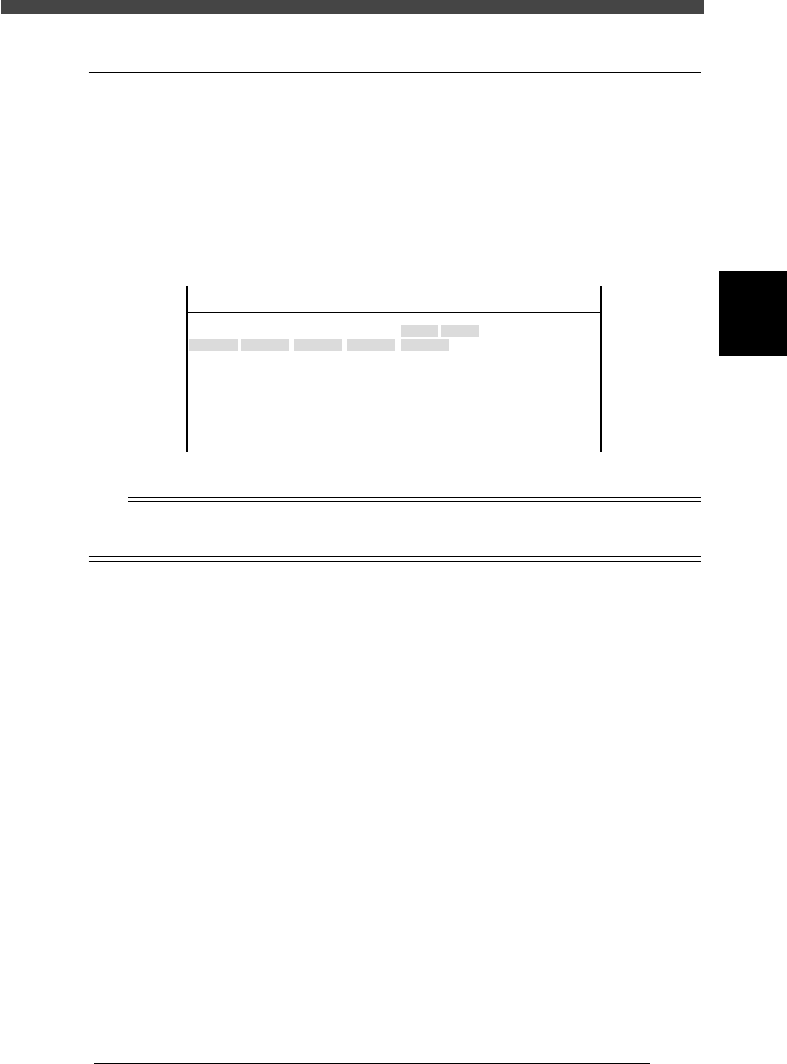
2.5 R 絶対精度補正
「ヘッド」サブメニューから「R 絶対精度補正」を選択すると、下図の画面
が開きます。ここでは、部品を搭載するときの各ヘッドのR 軸(ノズル回転
軸)の角度補正値を確認できます。搭載角度 0度を基準として、180 度、
90 度、-90 度での角度補正値が入力されています。0度での値は常に
0.000 になります。
■ R 絶対精度補正画面
46307-C0-00
ティーチユニット 速度
---- ----
ヘッド番号
ヘッド 1A
ヘッド 2A
ヘッド 3A
ヘッド 4A
ヘッド 5A
ヘッド 6A
ヘッド 7A
ヘッド 8A
対象
R 絶対精度補正
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
180°
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0°
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
90°
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
-90°
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
n
要点
R絶対精度補正は、マシン調整モードの「R絶対精度補正」コマンドを実行すると、自動調整さ
れます。
サービスマニュアル
第
3
章
3-
10
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
3
JSD8013110
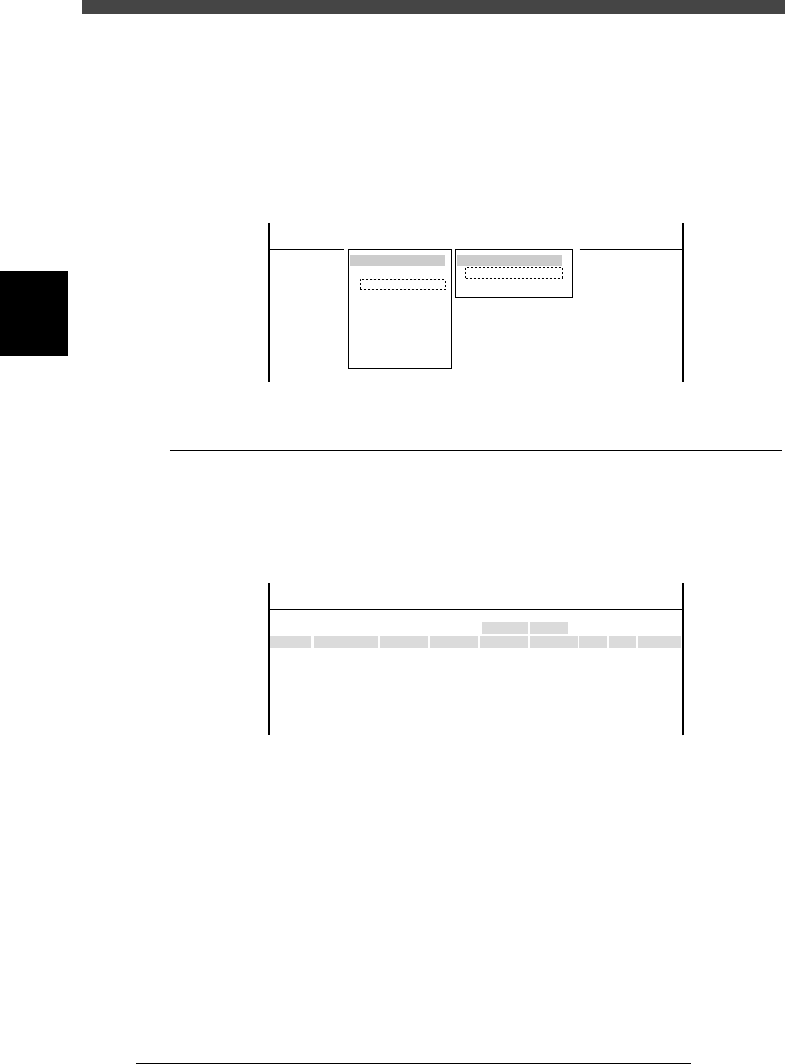
3. カメラ
「3/2/マシンデータ編集」→「カメラ」を選択すると、下図のようにサブメ
ニューが現れます。それぞれの内容について説明します。
■ カメラのサブメニューウインドウ
46308-C0-00
マシンデータ分類
ヘッド
カメラ
機械座標
トレイチェンジャー
ステーション
その他
精度パラメータ
予備データ
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
サブメニュー
位置座標/仕様
画像処理パラメータ
3.1 位置座標/ 仕様
「カメラ」サブメニューから「位置座標/ 仕様」を選択すると、下図の画面が
開きます。ここには、各カメラの位置座標などが入力されています。
■ 位置座標/ 仕様 画面例
46309-D8-00
ティーチユニット 速度
---- ----
対象
位置座標/仕様
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
Y
-0.166
0.000
0.091
0.446
0.000
-0.064
X
152.042
0.000
382.925
-152.051
0.000
472.334
Z
0.000
0.000
17.140
0.000
0.000
17.390
R
-0.305
0.000
-0.386
-0.099
0.000
-0.515
カメラ番号
カメラ 1A
カメラ 3A
カメラ 5A
カメラ 2B
カメラ 4B
カメラ 6B
種類
移動
- - - - - - - - -
デジタルマルチ
移動
- - - - - - - - -
デジタルマルチ
サイズ
0
0
45
0
0
45
高さ
0
0
7
0
0
7
照明仕様
Aタイプ
Aタイプ
Gタイプ
Aタイプ
Aタイプ
Gタイプ
X・Y 移動カメラではヘッドの基準位置からカメラの中心までの距離、
マルチカメラでは機械原点からのカメラのXY 位置座標(mm)
です。
Z カメラで認識するときの部品下面の高さ(mm)を示します。
R カメラの取付角度を示します。
サイズ XY 方向の認識可能な最大部品サイズ(mm)を示します。
高さ Z 方向の認識可能な最大部品サイズ(mm)を示します。
照明仕様 各カメラの照明仕様が指定されています。