YV180X Service_J.pdf - 第56页
サービスマニュアル 第 3 章 3- 20 マ シ ン デ ー タ 編 集 モ ー ド 3 JSD8013110 6 . 精度パラメーター 「 3/2/ マシンデータ編集」→「精度パラメーター」を選択すると、以下のサ ブメニューが現れます。サブメニューを選ぶと、搭載精度の補正パラメー ターや、認識精度を保つためのマルチカメラマーカーの設定が表示されま す。 ■ 精度パラメーターのサブメニューウインドウ 46319-D8-00 <&…
JSD8013110
サービスマニュアル
第
3
章
3-
19
3
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
5.
その他
「3/2/マシンデータ編集」→「その他」→「RS-232C」を選択すると、
RS232Cによる通信プロトコル画面が開きます。
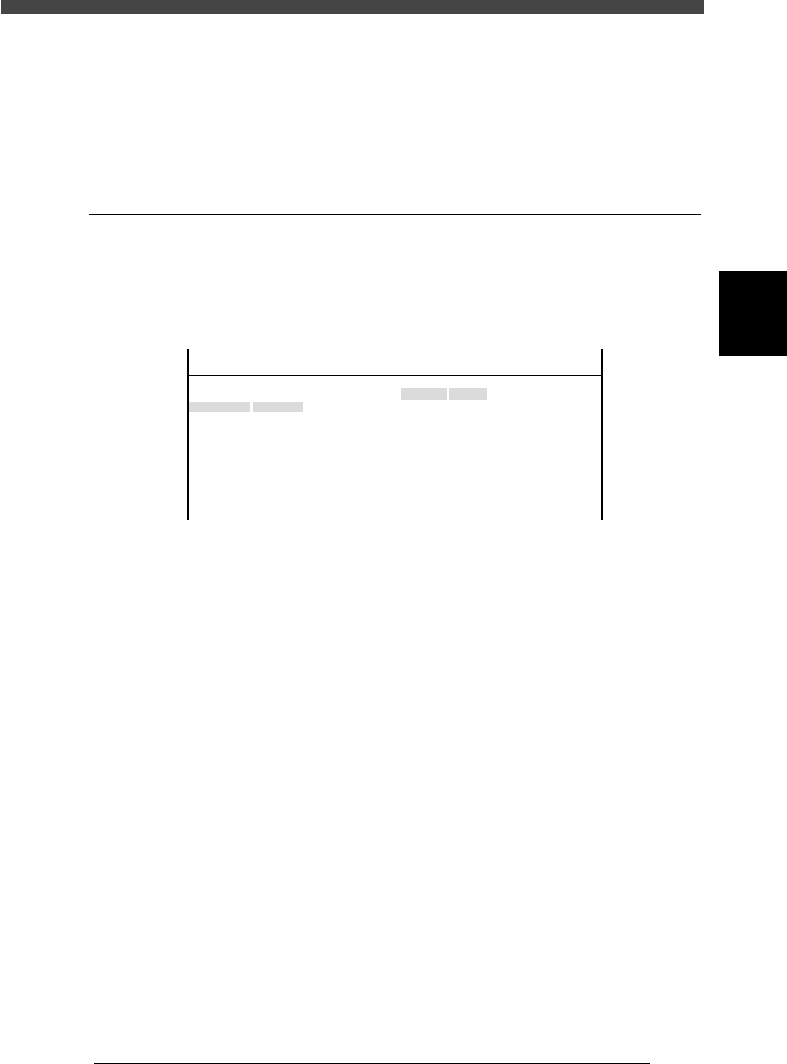
5.1 RS-232C
この画面でRS232Cによる通信プロトコルが指定できます。相手側の通信
仕様と一致させてください。
■ RS-2323C通信プロトコル
46318-C0-00
ティーチユニット 速度
- - - - - - - -
対象
RS-232C
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
編集対象
送信タイムアウト
CR/CRLF
フロー制御
ボーレート
パリティ
ストップビット
データ長
設定値
なし
CR
XON/XOFF
9600
奇数
1ビット
8ビット
サービスマニュアル
第
3
章
3-
20
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
3
JSD8013110
6. 精度パラメーター
「3/2/マシンデータ編集」→「精度パラメーター」を選択すると、以下のサ
ブメニューが現れます。サブメニューを選ぶと、搭載精度の補正パラメー
ターや、認識精度を保つためのマルチカメラマーカーの設定が表示されま
す。
■ 精度パラメーターのサブメニューウインドウ
46319-D8-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード> 2/マシンデータ編集
マシンデータ分類
ヘッド
カメラ
機械座標
トレイチェンジャー
ステーション
その他
レーザー
精度パラメータ
予備データ
サブメニュー
千鳥精度パラメータ
平行精度パラメータ
角度精度パラメータ
マルチカメラマーカー
編集カメラ番
カメラ 1
カメラ 2
カメラ 3
カメラ 4
カメラ 5
カメラ 6
カメラ 7
カメラ 8
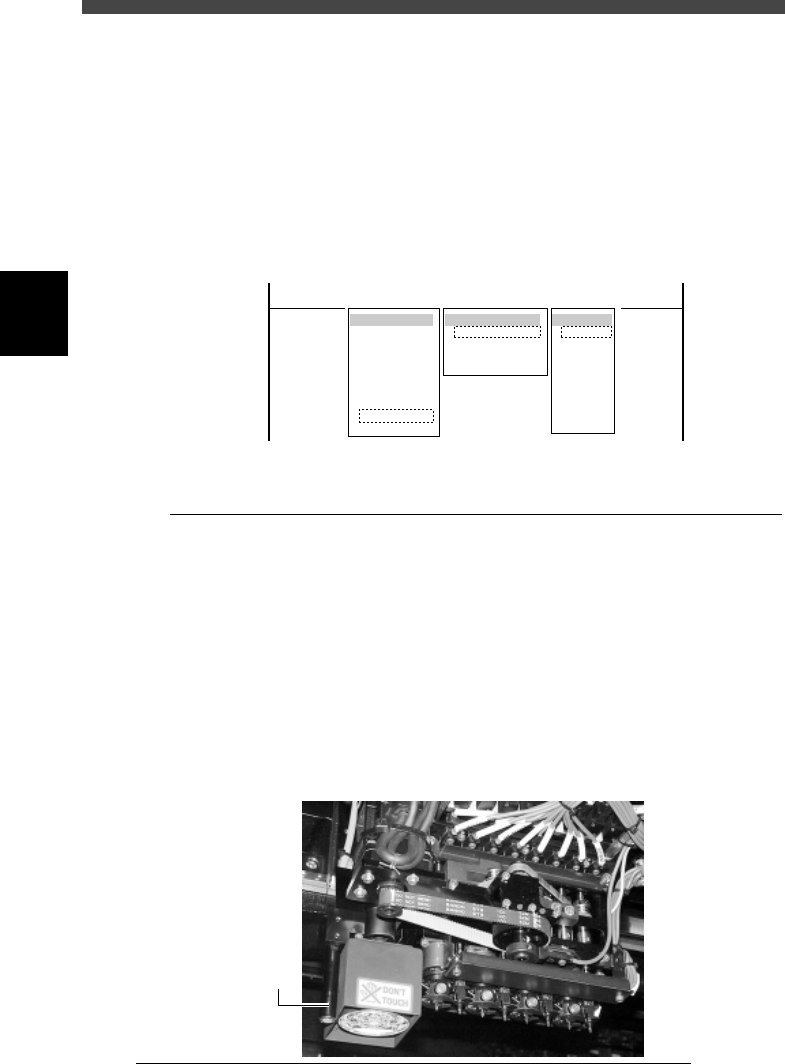
6.1 マルチカメラマーカー
サブメニューから「マルチカメラマーカー」を選ぶと、マルチカメラマー
カー画面が開きます。ここには、ヘッド部に設けられた基準マーカーのヘッ
ド1 からのオフセット位置などが入力されています。
マルチカメラマーカー機能を使用すると、ヘッド部に設けられた基準マー
カーを利用して部品が認識されます。 マシンの経時変化による影響が少なく
なり、常に安定した認識精度を得ることができます。本機でこの機能を使用
するときは、オプション構成の詳細画面 (工場設定)で「マーカー 2」に、ま
た 部品情報で、「使用」に設定します。
■ YV180Xヘッド部のマルチカメラマーカー
42302-D8-00
マーカー
JSD8013110
サービスマニュアル
第
3
章
3-
21
3
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
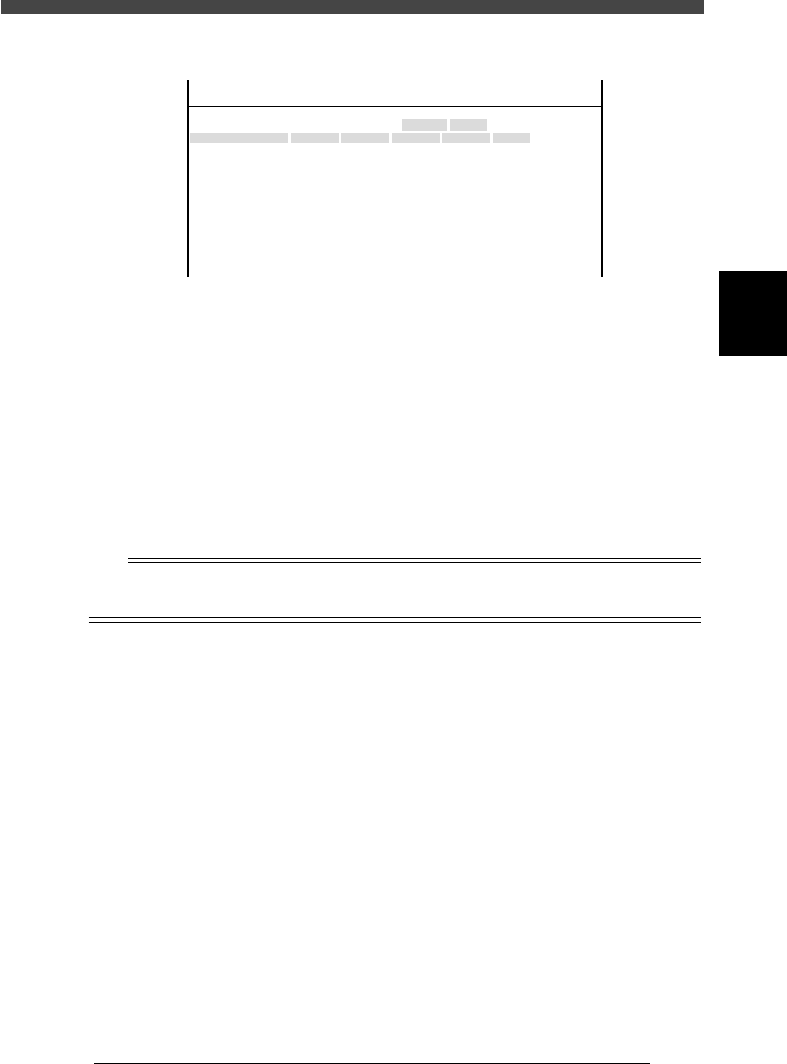
■ マルチカメラマーカー画面
46320-D8-00
座標4
980
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
座標3
0.000
0.000
0.000
0.000
-0.135
-0.138
0.000
0.000
対象名
マーカー1オフセット座標
マーカー2オフセット座標
マーカーウィンドウ幅
カメラ3基準位置+
カメラ3基準位置 -
カメラ4基準位置+
カメラ4基準位置 -
カメラ5基準位置+
カメラ5基準位置 -
カメラ6基準位置+
カメラ6基準位置 -
座標2
10.000
0.000
8.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
座標1
0.000
182.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
ティーチユニット 速度
- - - - - - - -
対象
マルチカメラマーカー
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
A
A
A
A
A
A
A
A
A
A
A
設定
255
マーカーオフセット座標1・2
A/ Bテーブルヘッドに設けられた基準マーカーのヘッド1から
のXY オフセット座標。
マーカーウィンドウ幅
基準マーカーを認識するときのウィンドウサイズ。
カメラ基準位置 + 基準マーカーをカメラ上で左→右方向認識したときの補正基準
位置座標Y (カメラ単位)。
カメラ基準位置 − 基準マーカーをカメラ上で右→左方向認識したときの補正基準
位置座標Y(カメラ単位)
n
要点
「カメラ基準位置 +/−」パラメーターは、マシン調整モードの「マーカー」コマンドを実行
すると自動的に調整されます。