YV180X Service_J.pdf - 第48页
サービスマニュアル 第 3 章 3- 12 マ シ ン デ ー タ 編 集 モ ー ド 3 JSD8013110 4 . 機械座標 「 3/2/ マシンデータ編集」→「機械座標」を選択すると、下図のようにサブ メニューが現れます。それぞれの内容について説明します。 ■ 機械座標のサブメニューウインドウ 46311-C0-00 マシンデータ分類 ヘッド カメラ 機械座標 トレイチェンジャー ステーション その他 精度ハ…
JSD8013110
サービスマニュアル
第
3
章
3-
11
3
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
3.2 画像処理パラメーター
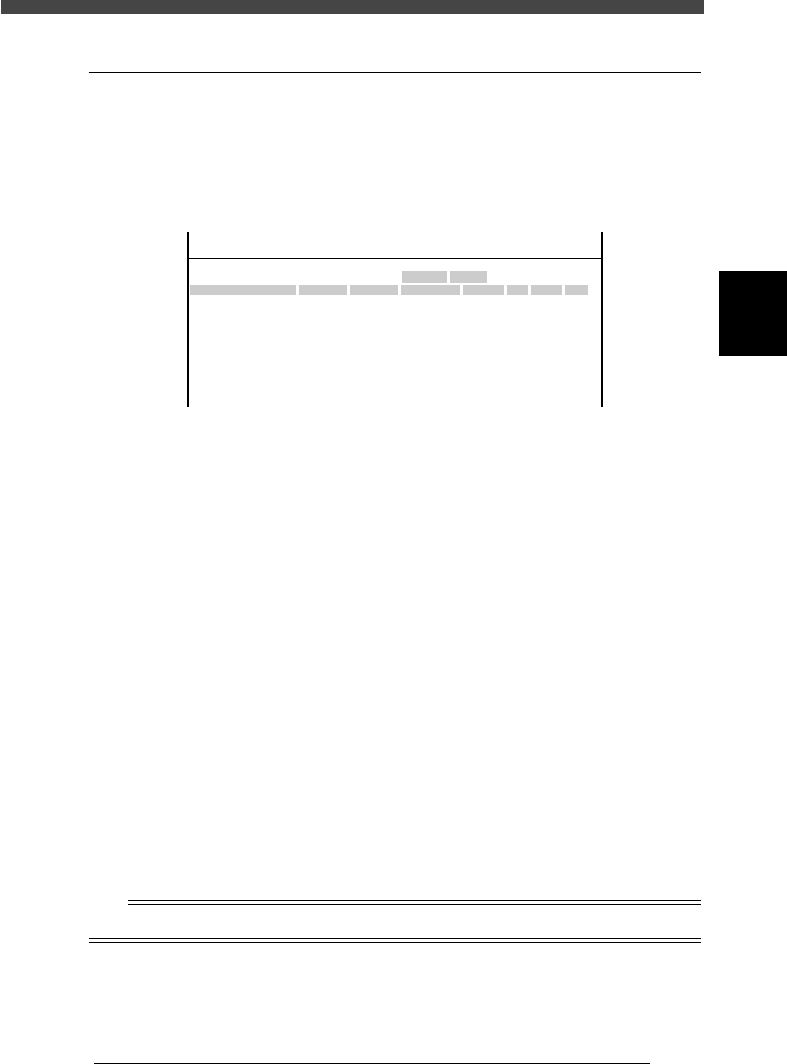
「カメラ」サブメニューから「画像処理パラメータ」を選択すると、下図の
画面が開きます。ここには、画像処理に使われる各カメラのパラメーターが
入力されています。
■ 画像処理パラメータ画面
46310-D8-00
対象名
カメラ 1 スケール(ミクロン)
カメラ 3 スケール(ミクロン)
カメラ 5 スケール(ミクロン)
カメラ 3 スケール変化量
カメラ 5 スケール変化量
カメラ 3 位置変化量
カメラ 5 位置変化量
カメラ 2 スケール(ミクロン)
カメラ 4 スケール(ミクロン)
認識速度
1100.000
1100.000
0.000
0.065
1100.000
Y
10.399
0.000
48.809
0.000
0.282
0.000
1.001
10.428
0.000
X
10.465
0.000
48.828
0.000
0.000
0.000
-3.606
10.489
0.000
分周比
12パルス
8パルス
12パルス
ティーチユニット 速度
- - - - - - - -
対象
画像処理パラメータ
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
メイン
128
同軸
40
サイド
90
A
A
A
A
A
A
A
B
B
対象名 カメラ番号とパラメーター名を示します。カメラ番号は、
「位置座標/ 仕様」画面で指定されていたカメラ番号と同じ
です。
スケール・XY カメラのXY 方向のスケール (1画素当たりのサイズ) です。
(単位はミクロン )
スケール・認識速度 部品認識時にヘッドがマルチカメラ上を動くスピードです。
スケール変化量 ・XY カメラスケールの高さ方向の補正値です。同じサイズの部品
を認識する際、背の高い部品は大きく、背の低い部品は小さ
くカメラに写るのを補正します。 (単位はミクロン )
位置変化量 ・XY カメラ位置を高さ方向で補正します。
位置変化量 ・認識速度 両方向認識オフセット (カメラ上を右方向と左方向に部品を
移動させて認識したときの位置オフセット量)。
分周比 マルチカメラ認識時の分周比が設定されています。
メイン マルチカメラのメイン照明レベル。
同軸 マルチカメラの同軸照明レベル。
サイド マルチカメラのサイド照明レベル。
n
要点
上記パラメーターはマシン調整モードのユーティリティを実行すると自動的に調整されます。
サービスマニュアル
第
3
章
3-
12
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
3
JSD8013110
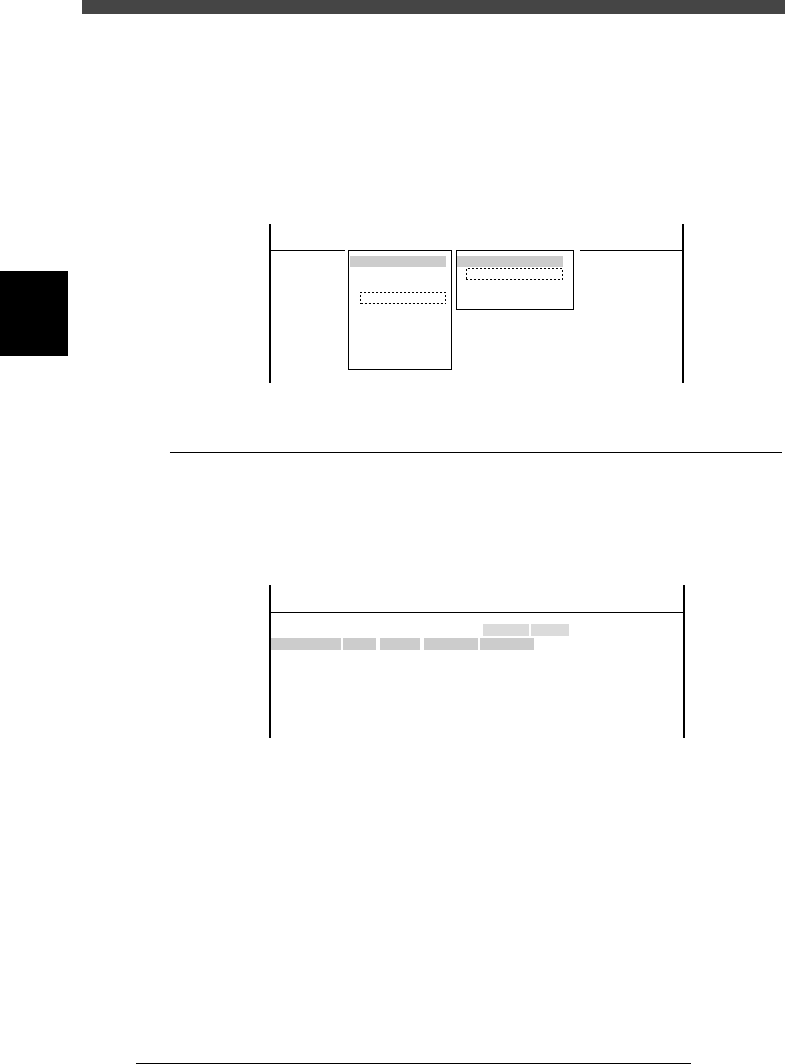
4. 機械座標
「3/2/マシンデータ編集」→「機械座標」を選択すると、下図のようにサブ
メニューが現れます。それぞれの内容について説明します。
■ 機械座標のサブメニューウインドウ
46311-C0-00
マシンデータ分類
ヘッド
カメラ
機械座標
トレイチェンジャー
ステーション
その他
精度パラメータ
予備データ
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
サブメニュー
フィーダープレート補正
ソフトリミット
機械座標
4.1 フィーダープレート補正
ここでは、フィーダープレートの管理情報の確認、および基準位置の編集や
ティーチング入力が行えます。
■ フィーダープレート補正画面
46312-D8-00
基準番号
2
10
18
26
30
0
0
総本数
8
8
8
4
8
0
0
X
-183.016
489.650
617.580
745.660
891.490
0.000
0.000
Z
17.310
17.140
17.140
17.140
17.180
0.000
0.000
ティーチユニット 速度
- - - - - - - -
対象
フィーダプレート補正
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
プレート番号
フィーダプレート 1
フィーダプレート 2
フィーダプレート 3
フィーダプレート 4
フィーダプレート 5
フィーダプレート 6
フィーダプレート 7
プレート番号 本機の前後に設けられたフィーダープレートは、フィーダー
セット位置 を幾つかのブロックに区切り、ブロックごとに基準
位置の座標が入力されています。各ブロックに「フィーダープ
レート番号」が付けられています。(この番号と実際にフィー
ダーを取り付けるフィーダーセット位置番号とは異なります。)
総本数 フィーダープレートの各ブロックに分けられたフィーダーセッ
ト位置の数です。標準仕様のYV180X では、この合計は80 に
なります。
基準番号 基準位置に指定されているフィーダーセットNo. です。この基準
位置はブロック内のどこに設定しても構いません。
「X」「Z」 基準位置に8mm テープフィーダーをセットしたときの部品吸着
位置と高さ(mm)です。
JSD8013110
サービスマニュアル
第
3
章
3-
13
3
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
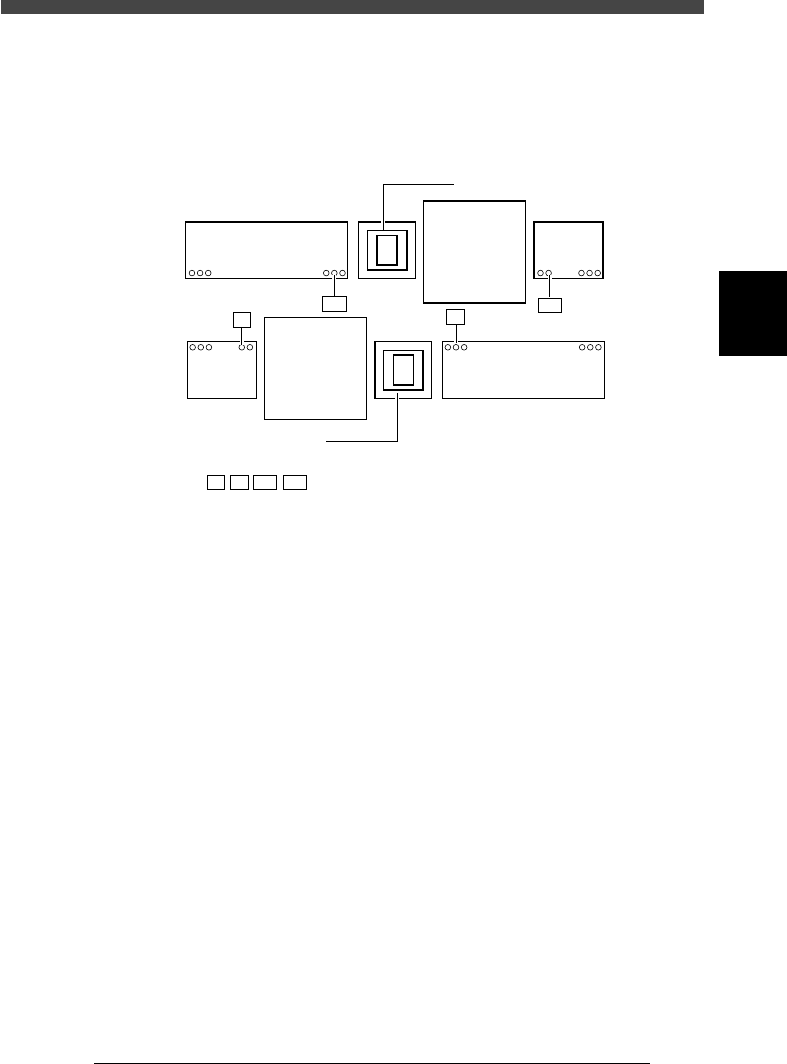
下図は、前側と後ろ側のフィーダープレートをそれぞれ2 ブロック(合計4
ブロック)に区切り、フィーダーセット番号の7, 10, 107, 110 を基準位置
に設定した例です。
■ フィーダープレート基準位置(例)
42301-D8-00
140 109
101
19840
108
7
10
10
107
110
107
110
7
を基準位置として、フィーダープレートを
合計4ブロックに区切った場合
マルチビューカメラ
マルチビューカメラ
Bテーブル
Aテーブル
●フィーダープレート基準位置のティーチング(X 軸方向)
フィーダープレート基準位置は出荷時に正確に設定されていますので、通常
は再ティーチングする必要はありません。何らかの理由で再ティーチングが
必要になったときは、下記の手順で行ってください。ティーチングにはヘッ
ド 1 を使用します。(ヘッド1 が届かない位置はヘッド8 を使用します。)
あらかじめ、小型チップ部品のテープフィーダーを用意してください。
e
1
非常停止ボタンを押します。
2
ヘッド1 にノズルが付いていることを確認します。
小型チップ部品用のノズル(例えばタイプ72)を勧めます。
3
テープフィーダーをフィーダープレートの基準位置にセッ
トします。
4
安全を確認して、非常停止を解除します。
非常停止ボタンを回転解除し、[READY] ボタンを押してください。