YV180X Service_J.pdf - 第64页
JSD8013110 サービスマニュアル 第 4 章 4- 8 マ シ ン 調 整 モ ー ド 4 2 . 5 ヘッド下降バルブ <3/3/A6> 「 3/3/A6 ヘッド下降バルブ」を実行すると、エア駆動により各ヘッドが繰 り返し上下し、その速度が自動的に測定され、各ヘッドの動作タイミングが 表示されます。動作タイミングが大きく異なるヘッドは駆動バルブの不良が 考えられます。 ■ ヘッド上下速度の測定画面 46407-D8…
JSD8013110
サービスマニュアル
第
4
章
4-
7
マ
シ
ン
調
整
モ
ー
ド
4
2.3 部品廃棄 <3/3/A4>
ノズルに吸着させた部品を廃棄したいときは、「3/3/A4 部品廃棄」コマン
ドを選択実行してください。ヘッドがあらかじめ設定しておいた廃棄位置に
移動し、部品を廃棄します。(廃棄位置については4 章「3.2 機械座標」を参
照してください。)
■ 「部品廃棄」コマンド
46405-C0-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> A/コマンド操作
A4 部品廃棄
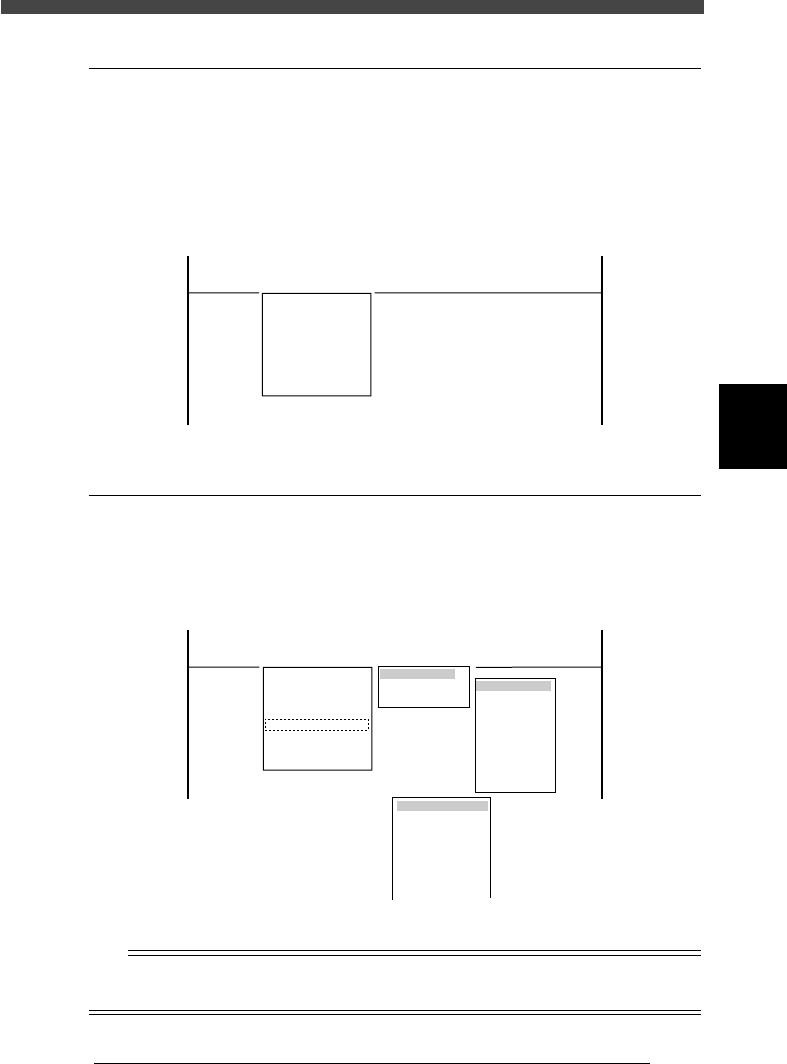
2.4 ノズルチェンジ <3/3/A5>
「3/3/A5 ノズルチェンジ」コマンドを実行し、ヘッドとノズルタイプを選
択すると、ノズルが自動交換されます。
■ 「ノズルチェンジ」コマンド
46406-D8-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> A/コマンド操作
A1 バキュームON
A2 バキュームOFF
A3 部品吸着テスト
A4 部品廃棄
A5 ノズルチェンジ
A6 ヘッド下降バルブ
A7 運転スピード変更
A8 原点復帰
テーブルを選択
Aテーブル
Bテーブル
ヘッドを選択
ヘッド 1
ヘッド 2
ヘッド 3
ヘッド 4
ヘッド 5
ヘッド 6
ヘッド 7
ヘッド 8
使用するノズルの選択
タイプ71
タイプ72
タイプ73
タイプ74
タイプ75
タイプ76
タイプ77
n
要点
このコマンドは、FNC (フライングノズルチェンジ) 機構付きのヘッド 2, 4, 6, 8 のみ有効で
す。
JSD8013110
サービスマニュアル
第
4
章
4-
8
マ
シ
ン
調
整
モ
ー
ド
4
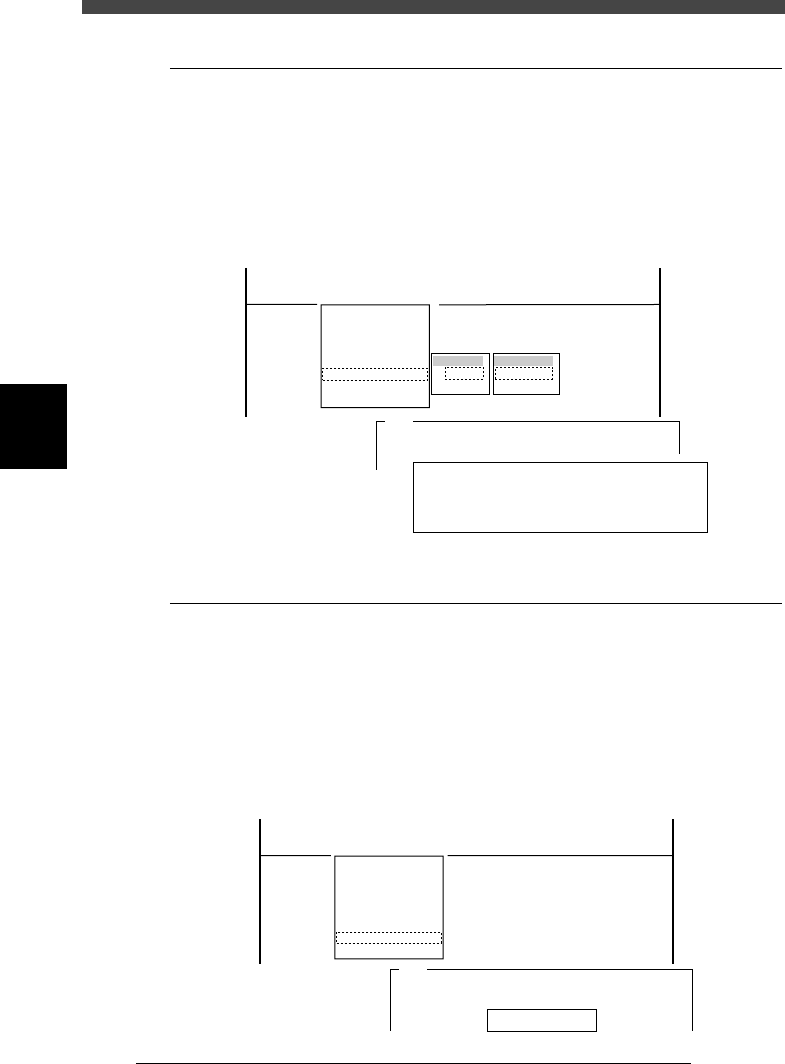
2.5 ヘッド下降バルブ<3/3/A6>
「3/3/A6 ヘッド下降バルブ」を実行すると、エア駆動により各ヘッドが繰
り返し上下し、その速度が自動的に測定され、各ヘッドの動作タイミングが
表示されます。動作タイミングが大きく異なるヘッドは駆動バルブの不良が
考えられます。
■ ヘッド上下速度の測定画面
46407-D8-00
A346
ヘッドの下降の速度の測定を行います。
繰り返し全ヘッドを上下させ・・・
ヘッド下降タイミング指数
ヘッド 1 2 3 4 5 6 7 8
タイミング 30 29 29 28 30 28 29 30
平均 29
何かキーを押すと終了します。
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> A/コマンド操作
A1 バキュームON
A2 バキュームOFF
A3 部品吸着テスト
A4 部品廃棄
A5 ノズルチェンジ
A6 ヘッド下降バルブ
A7 運転スピード変更
A8 原点復帰
調整バルブ
下降側
上昇側
テーブル
Aテーブル
Bテーブル
2.6 運転スピード変更 <3/3/A7>
自動運転の速度で調整を行うことは大変危険です。「3/3/A7 運転スピード
変更」コマンドで、調整時の軸移動を自動運転の何%に下げるかを設定でき
ます。通常10 ∼ 20%に設定します。(100%は自動運転の最高速度と同じ
です。)安全のため、現在このコマンドの設定は10%に固定されており変更
できません。
■ 運転スピード設定画面
46408-C0-00
A378
軸の運転速度を設定してください。
速度は・・・
速度(%) 10
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> A/コマンド操作
A1 バキュームON
A2 バキュームOFF
A3 部品吸着テスト
A4 部品廃棄
A5 ノズルチェンジ
A6 ヘッド下降バルブ
A7 運転スピード変更
A8 原点復帰
JSD8013110
サービスマニュアル
第
4
章
4-
9
マ
シ
ン
調
整
モ
ー
ド
4
2.7 原点復帰 <3/3/A8>
「3/3/A8 原点復帰」コマンドを実行すると、全軸が原点復帰します。マシ
ン立ち上げ後は、原点復帰を一度は行う必要があります。
「原点復帰」コマンドは各アプリケーション・マネージャーの手動モードに
もあります。一度原点復帰させた後、再度原点出しをしたい場合は、「原点
復帰」コマンドにカーソルを合わせ、[SHIFT] + [ENTER]キーを押してく
ださい。原点復帰後、各軸のマシンリファレンスも画面に表示されます。 (下
図参照)
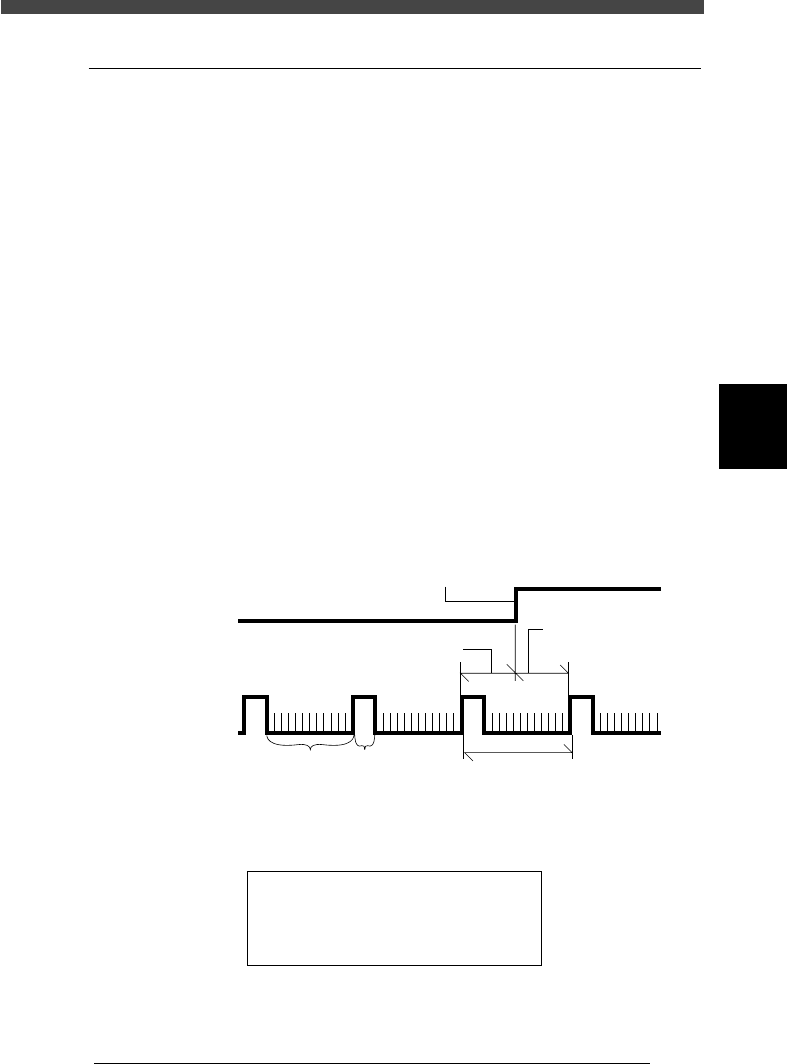
マシンリファレンスについて
各軸のサーボモーターに組み込まれたエンコーダーは、モーターが1 回転す
るごとに 0 信号を発信します。マシンリファレンスは、原点復帰のときに原
点信号を感知してから次のエンコーダー0 信号を受信するまでの軸移動量
(モーター回転量) で、モーター1 回転に対する%で表されます。原点位置を
正確に保つために、マシンリファレンスは許容範囲内 (35%∼65%) に設定
されていなければなりません。
■ マシンリファレンス
42402-D8-00
エンコーダー信号
原点センサー信号
原点信号
マシンリファレンス(Z軸)
モーター1回転
A, B相
ゼロ相
マシンリファレンス
(W, X, Y, R, T軸)
■ マシンリファレンス表示画面
46409-D8-00
マシンリファレンス
X1=50%
W1=55%
X2
W3=48%
Y1=50%
W2=45%
Y2
W4=55%
Z1=46%
T1=48%
Z2=50%
R1=45%
R2=47%
何かキーを押して下さい