YV180X Service_J.pdf - 第77页
JSD8013110 サービスマニュアル 第 4 章 4- 21 マ シ ン 調 整 モ ー ド 4 廃棄位置 ヘッドが部品を廃棄する位置座標 ( 部品廃棄ボックスの位置) やノズル詰ま り防止エアーブローの方法が入力されています。 46411-D8-E0 種類 通常 100 フィーダー R 0.000 0.000 0.000 0.000 Z 0.000 0.000 …
JSD8013110
サービスマニュアル
第
4
章
4-
20
マ
シ
ン
調
整
モ
ー
ド
4
<< ノズル詰まり防止エアブロー >>
ノズルにゴミまたハンダなどが詰まるのを防ぐために、「待機位置」と「廃
棄位置」で一定時間エアブローしノズル内の異物を吹き飛ばします。この設
定は、「待機位置」と「廃棄位置」の「種類」および「フィーダー」欄で行
います。
■ ノズル詰り防止エアブローの設定と動作
44403-C0-00
待機位置
通常
通常
廃棄動作
廃棄動作
廃棄位置
通常
通常以外
通常
通常以外
「種類」欄の設定 動作
「廃棄位置」の「フィーダー」欄に設定
した時間でエアブローを行います。
「廃棄位置」の「種類」欄に設定した
時間でエアブローを行います。
「廃棄位置」の「フィーダー」欄に設定
した時間でエアブローを行います。
「廃棄位置」の「種類」欄に設定した時
間でエアブローを行います。
何も行いません。
何も行いません。
「廃棄位置」の「フィーダー」欄に設定
した時間でエアブローを行います。
「廃棄位置」の「種類」欄に選択した時
間でエアブローを行います。
待機位置 廃棄位置
c
注意
待機位置でエアブローを行うときは、待機位置が基板やフィーダーの上にならないように注意
してください。「廃棄位置」の「フィーダー」欄の設定は、部品搭載直後のエアブロータイ
マーと共通です。この設定を大きくしすぎると、搭載直後に部品を吹き飛ばすおそれがありま
すので注意してください。
JSD8013110
サービスマニュアル
第
4
章
4-
21
マ
シ
ン
調
整
モ
ー
ド
4
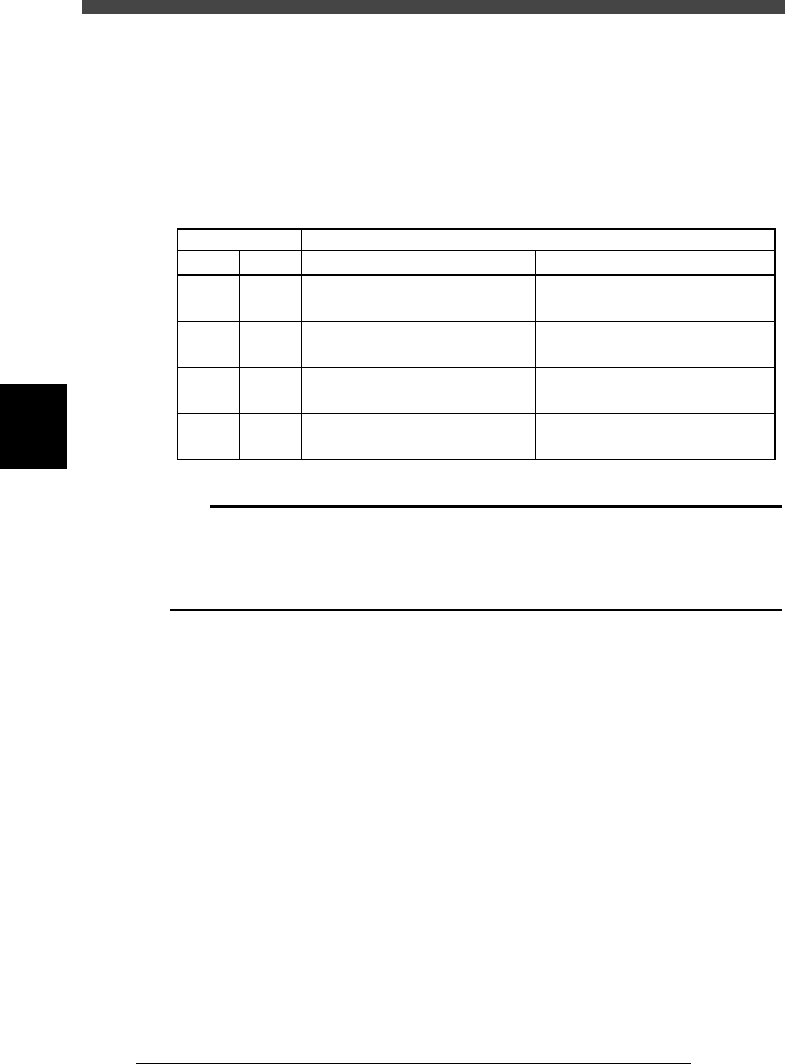
廃棄位置
ヘッドが部品を廃棄する位置座標 (部品廃棄ボックスの位置) やノズル詰ま
り防止エアーブローの方法が入力されています。
46411-D8-E0
種類
通常
100
フィーダー
R
0.000
0.000
0.000
0.000
Z
0.000
0.000
対象名
FINEモード
ロケートピン基準
基板外形基準
待機位置
廃棄位置
Y
0.005
118.810
118.810
0.000
71.321
X
-28.280
-28.280
562.000
255.916
ティーチユニット 速度
- - - - - - - -
対象
機械座標
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
A
A
A
A
A
種類 ノズルにゴミや半田などが詰まるのを防ぐために、ノズル内の
エアブロー動作を指定します。詳しくは「待機位置」の「ノズ
ル詰まり防止エアブロー」の説明をご覧ください。
X・Y 部品を廃棄するときのヘッド 1 のXY位置です。出荷時には部
品廃棄ボックスの位置に合わせて、廃棄位置が入力されていま
す。この位置座標は変更しないでください。
Z 部品を廃棄するときのノズルの高さです。出荷時には標準的な
廃棄時の高さが入力されています。
フィーダー 部品廃棄または部品搭載時のエアーブロータイマー(単位は
ms)を設定します。エアーブロー機構を持つマシンのみ有効で
す。通常、20 ∼100ms に設定します。
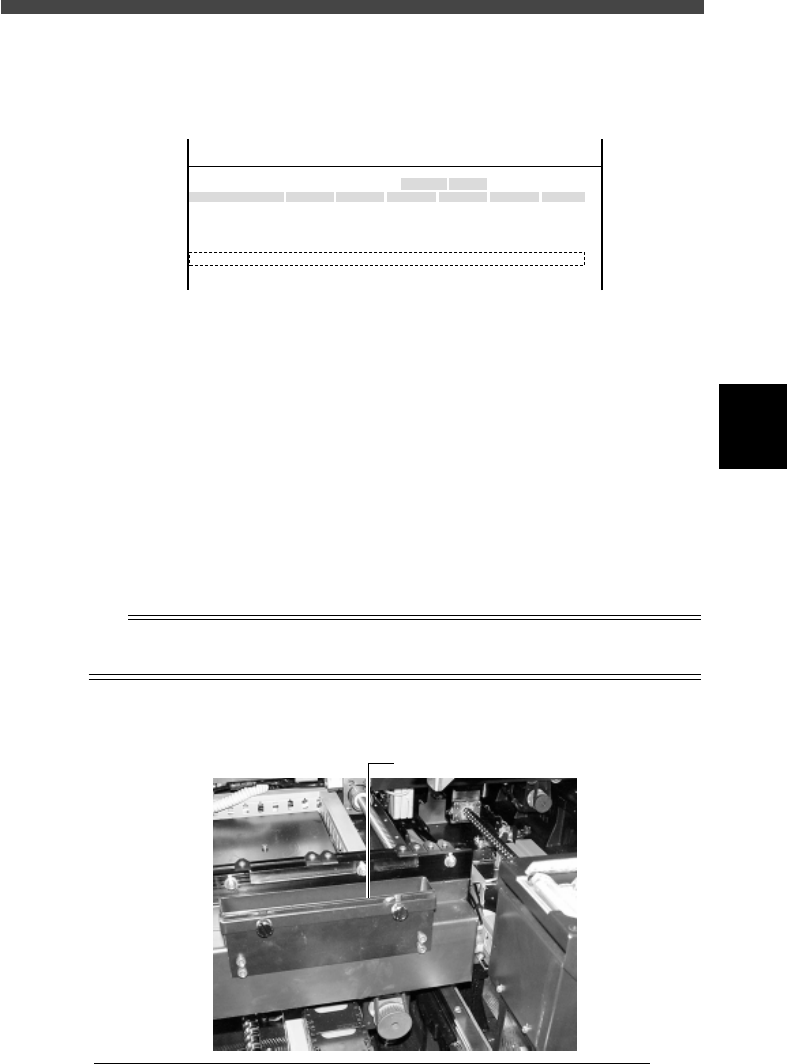
参考
標準YV180Xの部品廃棄ボックスは、Aテーブルでは固定側コンベアレールの外側、Bテーブ
ルでは可動側コンベアレールの外側にネジ止めされており、変更できません。
■ 部品廃棄ボックス
42418-D8-00
部品廃棄ボックス
JSD8013110
サービスマニュアル
第
4
章
4-
22
マ
シ
ン
調
整
モ
ー
ド
4
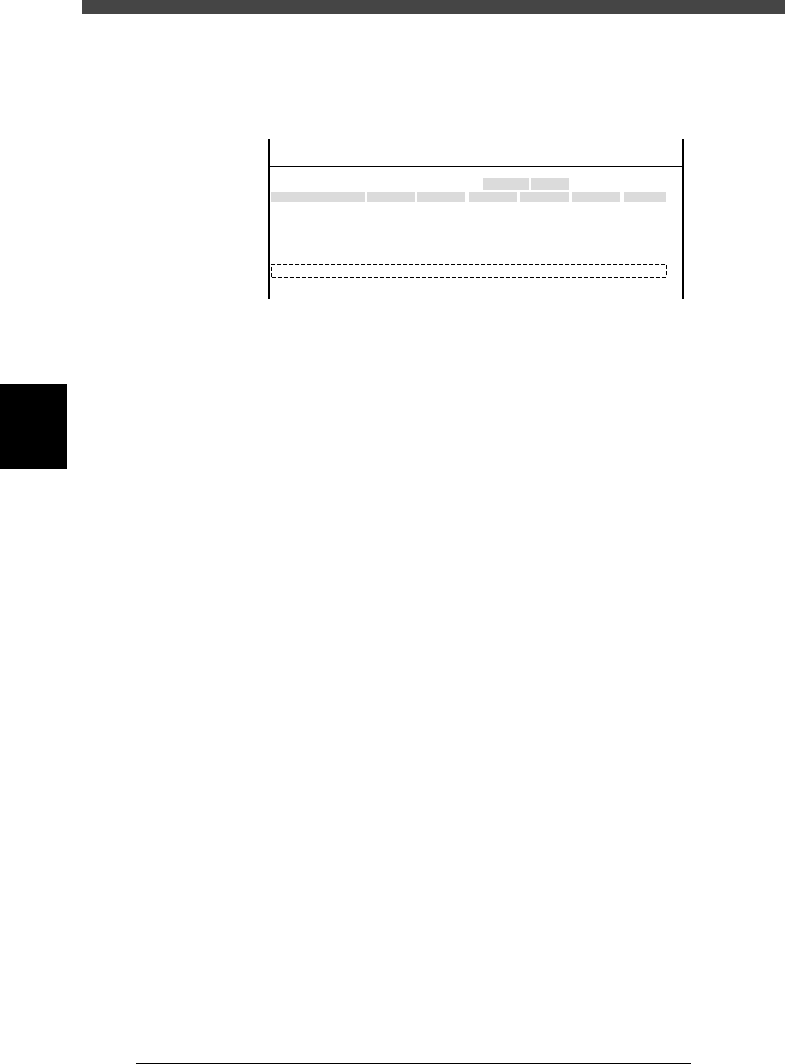
基板面
部品搭載位置の基板面の高さや部品の持ち帰りをチェックするためのパラ
メーターが設定されています。
46417-D8-00
種類
通常
100
廃棄後
フィーダー
100
R
0.000
0.000
0.000
0.000
17.480
0.200
Z
0.000
0.000
17.480
0.500
対象名
FINEモード
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面
同時吸着範囲
Y
0.005
118.810
118.810
0.000
71.321
0.5000
X
-28.280
-28.280
562.000
255.916
0.500
ティーチユニット 速度
- - - - - - - -
対象
機械座標
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
A
A
A
A
A
A
A
種類 自動運転中にノズルの空認識を行うための設定です。
なし :空認識を行いません。
廃棄後 :部品廃棄があった場合に空認識を行います。
搭載後 :部品搭載ごとに空認識を行います。
Z 部品を装着するときのヘッド部全体の高さ。
R 固定トレイを使用したときのパレット面の高さ。 (YV180X では
無効です。)
フィーダー 基板を固定・解除するときに上昇・下降するPU (プッシュアッ
プ) 軸の速度です。10 ∼100%に設定できます。出荷時は100
%となっています。 (YV180X のプッシュアッププレートはエア
駆動ですので、この設定は無効です。)
「基板面」高さを設定するときは以下の手順を参考にしてください。
基板面と固定側コンベアレールの上面は同じ高さとなりますので、ここでは
コンベアレール上面の高さを「基板面」高さとして設定します。各ヘッドに
タイプ72 ノズルが付いていることを確認してください。
1
ジョイスティックで 操作するXY 軸を選択します。
「3/4/B1 ジョイスティック軸選択」→「A テーブル XY 軸」 (または「B
テーブル XY 軸」) を選択してください。
2
ヘッド部を固定側のコンベアレール上に移動させます。
ジョイスティックを操作して、ヘッド1 のノズルが固定側コンベアレール
の真上に来る位置で止めてください。