YV180X Service_J.pdf - 第114页
JSD8013110 サービスマニュアル 第 4 章 4- 58 マ シ ン 調 整 モ ー ド 4 3.5.3 カメラスケール カメラスケールは部品認識するときの画像処理パラメータの一つで、カメラ の 1 画素のサイズ(ミクロン)を表します。寸法規格が正確に分かっている S O P または Q F P 部品を用いて、調整ユーティリティを実行してカメラス ケールを求めます。カメラスケールと共に、カメラ位置座標 X Y 、取付角度 R も…
JSD8013110
サービスマニュアル
第
4
章
4-
57
マ
シ
ン
調
整
モ
ー
ド
4
8
ライトアジャスターを付け替えます。
非常停止ボタンを押して、ヘッド1 に吸着させてあるライトアジャスター
を取り外し、ライトアジャスター2(KV7-M8806-0XX)の乳白面を下に
向けて取り付けます。
サイド照明の付いていないマルチカメラの場合は、Step 8 と 9 は省略し
てください。
9
非常停止を解除して、[ENTER] キーを押します。
ヘッド部がカメラ上を繰り返し移動し、サイド照明の光量レベルが自動的
に調整されます。
このとき、選択されているカメラの照明LED が点滅していることを確認
してください。
0
調整を終了します。
画面のメッセージに従って調整終了し、フォーカスアジャスターを取り外
してください。この調整で保存するデータはありません。
n
要点
照明光量の調整が正確に行われたときは、下記の基準値に入っています。
なお、ここで調整した照明光量データは、マシンデータ編集モードの「カメラ」→「画像処理
パラメーター」(3章「3.2」参照) の中に入力されています。
■ マルチカメラ照明レベルの基準値
44408-D8-00
基準値
128±1
40±1
90±1
照明タイプ
メイン
同 軸
サイド
JSD8013110
サービスマニュアル
第
4
章
4-
58
マ
シ
ン
調
整
モ
ー
ド
4
3.5.3 カメラスケール
カメラスケールは部品認識するときの画像処理パラメータの一つで、カメラ
の1 画素のサイズ(ミクロン)を表します。寸法規格が正確に分かっている
SOP またはQFP 部品を用いて、調整ユーティリティを実行してカメラス
ケールを求めます。カメラスケールと共に、カメラ位置座標XY、取付角度
R も同時に調整されます。
1
基準となる部品を用意します。
データベースに登録済みの、寸法規格の分かっているSOP またはQFP 部
品を用意してください。テープ部品を使用する場合は、あらかじめフィー
ダープレートにテープフィーダーをセットしておいてください。
参考
YAMAHAでは、反りや変形のない調整専用ガラスQFPを使用しています。より正確な調整を
行いたいときは、このガラスQFP (別売り) の使用をお勧めします。
2
部品データベースの登録を確認・修正します。
通常、部品データベース登録No.500 以降のデータはプロテクト対象のた
め修正できません。一度、登録No.500未満にコピーして、それを修正し
ます。
ここでは、登録No.2 にSOP部品をコピーした場合について説明します。
ガラスQFP (データベース番号996) を使用する場合は、このステップは
不要です。
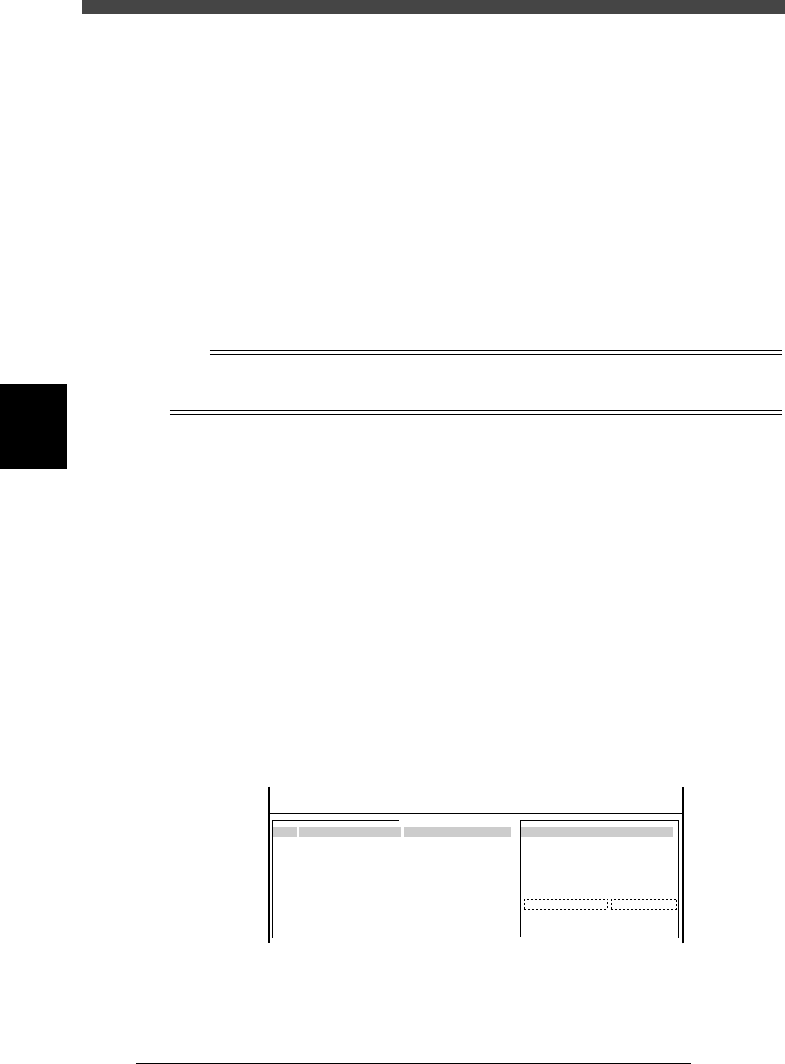
1.「2/3/A1 部品データベース」を開き、カーソルを登録部品No.2 に合
わせます。
2. [TAB]→[F4]キーを押してサブ画面を「5. 認識情報」に切り替え、
「リード検出範囲」の通常値を9.99(最大設定値)に修正します。
カメラスケールの調整は吸着した部品を少しずつ移動させながら測定
しますので、この動きに対応させるためです。
46447-C0-00
<<<アプリケーション>>> 2/データ/M
<<モード>> 3/データベース
編集:部品データベース
9.990
部品名
Sample_SOP16-P1.27
5. 認識情報
リード検出範囲
コメント
example_data
No.
1
2
3
4
5
6
7
8
:
JSD8013110
サービスマニュアル
第
4
章
4-
59
マ
シ
ン
調
整
モ
ー
ド
4
3. [F4]キーを押してサブ画面を「1. 基本情報」に切り替え、「部品供給形
態」を必要に応じて「トレイ」に修正します。
これは、調整時に手付け部品として扱うためです。テープフィーダー
を使って自動吸着させる場合は、「テープ」のままにしておきます。
46448-C0-00
トレイ
16mmエンボス
SOP10mm用63
<<<アプリケーション>>> 2/データ/M
<<モード>> 3/データベース
編集:部品データベース
部品名
Sample_SOP16-P1.27
1. 基本情報
部品供給形態
フィーダータイプ
使用ノズル
コメント
example_data
No.
1
2
3
4
5
:
:
:
e
3
ヘッド1 にノズルを付けます。
非常停止ボタンを押してから、使用する部品に応じてタイプ73A または
74A ノズルをヘッド 1 に取り付けてください。 (ガラス QFP を使用すると
きは、タイプ74A を付けます。)
4
補助調整画面を開き、部品が認識できることを確認します。
1. 非常停止状態を解除し、[F6]キーを押して補助調整に入ります。
2.「部品吸着」と「部品認識テスト」を実行し、必要に応じてパラメー
ター値を調整してください。(詳しくは、オペレーションマニュアルを
ご覧ください。)補助調整後、部品は吸着させたままでかまいません。
5
修正したデータを保存します。
[ESC] キーを押してから、「C0 データ保存、終了」を実行してください。
6
「カメラスケール」コマンドを実行します。
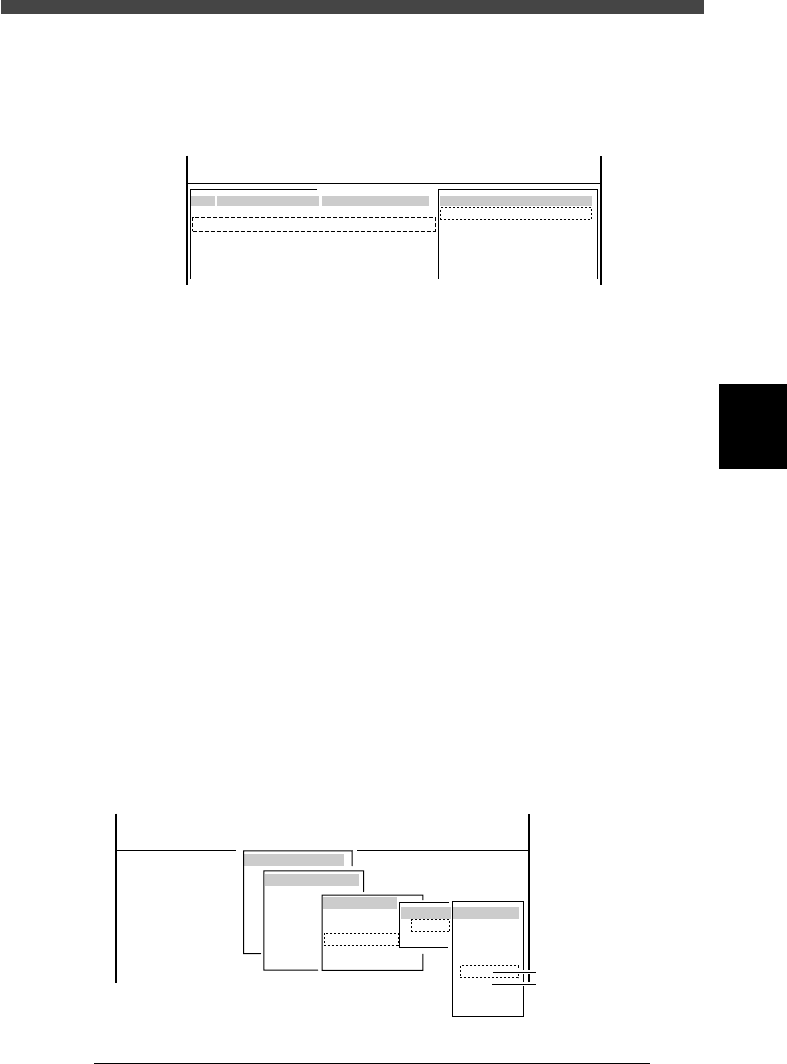
1.「3/3/B1 調整項目選択」→「マルチビューカメラ」→「カメラスケー
ル」を選択します。
2. 調整を行う「テーブル」と「カメラ番号」を選択します。
通常、A テーブルのマルチカメラは「カメラ 5」、B テーブルは「カメ
ラ6」になっています。
46445-D8-B0
対象指定
視野 & ピント
照明光量
カメラスケール
両方向認識オフセット
マーカー
調整・検査対象
マルチビューカメラ
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> B/ファイル操作
B1 調整項目選択
カメラ番号
カメラ1
カメラ2
カメラ3
カメラ4
カメラ5
カメラ6
カメラ7
カメラ8
テーブル
Aテーブル
Bテーブル
Aテーブル マルチカメラ
Bテーブル マルチカメラ