YV180X Service_J.pdf - 第46页
サービスマニュアル 第 3 章 3- 10 マ シ ン デ ー タ 編 集 モ ー ド 3 JSD8013110 3 . カメラ 「 3/2/ マシンデータ編集」→「カメラ」を選択すると、下図のようにサブメ ニューが現れます。それぞれの内容について説明します。 ■ カメラのサブメニューウインドウ 46308-C0-00 マシンデータ分類 ヘッド カメラ 機械座標 トレイチェンジャー ステーション その他 精度パ…
JSD8013110
サービスマニュアル
第
3
章
3-
9
3
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
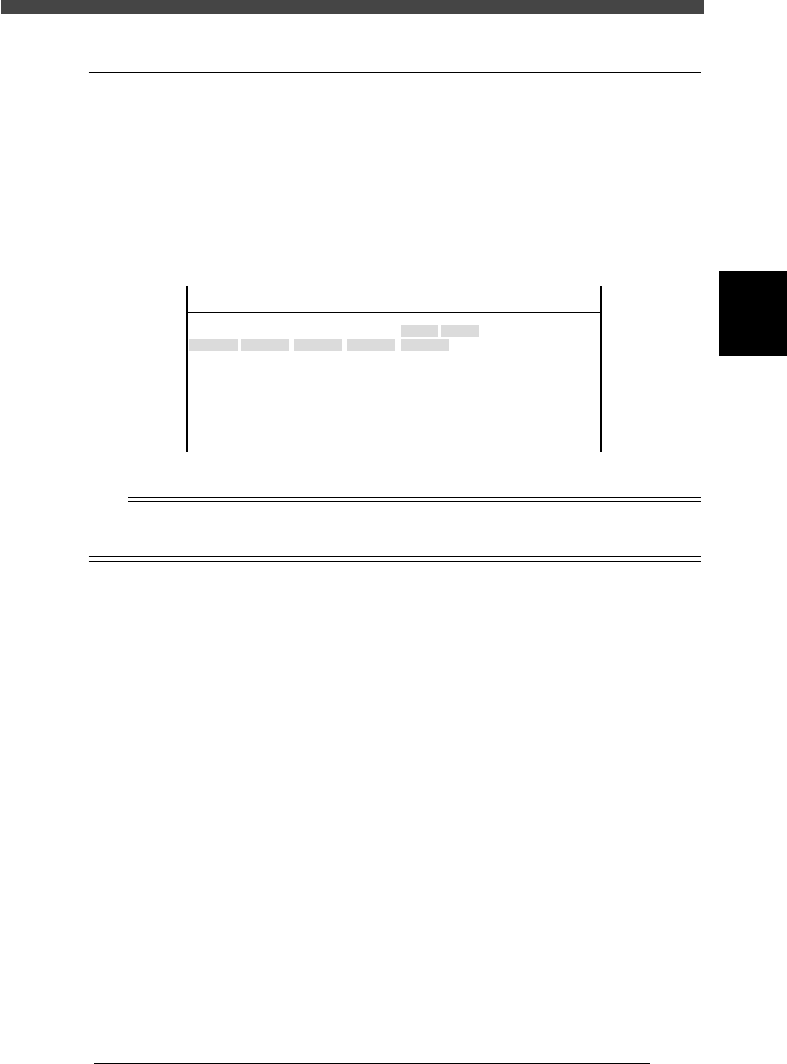
2.5 R 絶対精度補正
「ヘッド」サブメニューから「R 絶対精度補正」を選択すると、下図の画面
が開きます。ここでは、部品を搭載するときの各ヘッドのR 軸(ノズル回転
軸)の角度補正値を確認できます。搭載角度 0度を基準として、180 度、
90 度、-90 度での角度補正値が入力されています。0度での値は常に
0.000 になります。
■ R 絶対精度補正画面
46307-C0-00
ティーチユニット 速度
---- ----
ヘッド番号
ヘッド 1A
ヘッド 2A
ヘッド 3A
ヘッド 4A
ヘッド 5A
ヘッド 6A
ヘッド 7A
ヘッド 8A
対象
R 絶対精度補正
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
180°
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0°
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
90°
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
-90°
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
n
要点
R絶対精度補正は、マシン調整モードの「R絶対精度補正」コマンドを実行すると、自動調整さ
れます。
サービスマニュアル
第
3
章
3-
10
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
3
JSD8013110
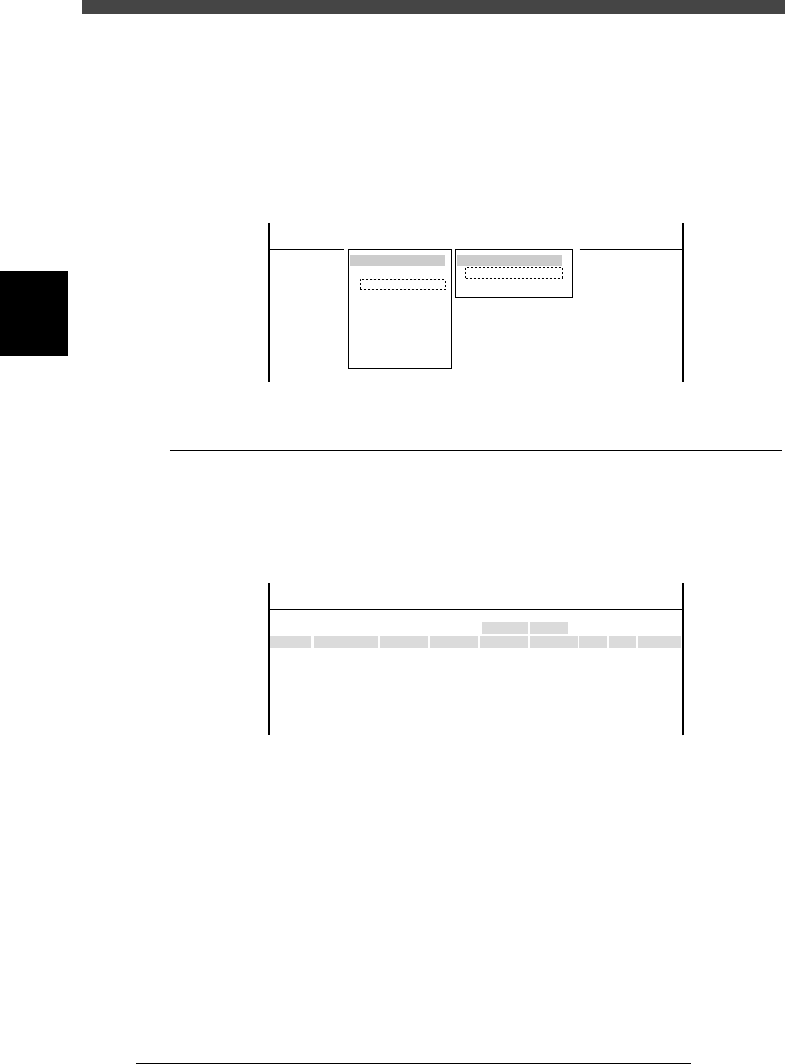
3. カメラ
「3/2/マシンデータ編集」→「カメラ」を選択すると、下図のようにサブメ
ニューが現れます。それぞれの内容について説明します。
■ カメラのサブメニューウインドウ
46308-C0-00
マシンデータ分類
ヘッド
カメラ
機械座標
トレイチェンジャー
ステーション
その他
精度パラメータ
予備データ
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
サブメニュー
位置座標/仕様
画像処理パラメータ
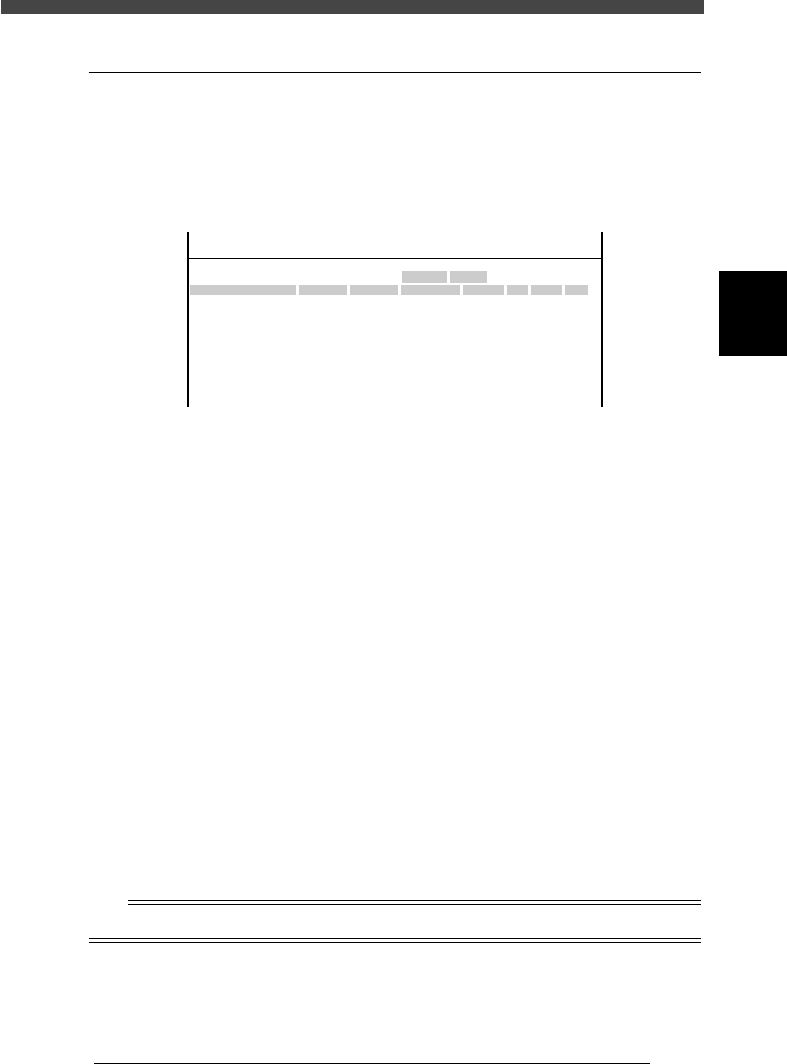
3.1 位置座標/ 仕様
「カメラ」サブメニューから「位置座標/ 仕様」を選択すると、下図の画面が
開きます。ここには、各カメラの位置座標などが入力されています。
■ 位置座標/ 仕様 画面例
46309-D8-00
ティーチユニット 速度
---- ----
対象
位置座標/仕様
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
Y
-0.166
0.000
0.091
0.446
0.000
-0.064
X
152.042
0.000
382.925
-152.051
0.000
472.334
Z
0.000
0.000
17.140
0.000
0.000
17.390
R
-0.305
0.000
-0.386
-0.099
0.000
-0.515
カメラ番号
カメラ 1A
カメラ 3A
カメラ 5A
カメラ 2B
カメラ 4B
カメラ 6B
種類
移動
- - - - - - - - -
デジタルマルチ
移動
- - - - - - - - -
デジタルマルチ
サイズ
0
0
45
0
0
45
高さ
0
0
7
0
0
7
照明仕様
Aタイプ
Aタイプ
Gタイプ
Aタイプ
Aタイプ
Gタイプ
X・Y 移動カメラではヘッドの基準位置からカメラの中心までの距離、
マルチカメラでは機械原点からのカメラのXY 位置座標(mm)
です。
Z カメラで認識するときの部品下面の高さ(mm)を示します。
R カメラの取付角度を示します。
サイズ XY 方向の認識可能な最大部品サイズ(mm)を示します。
高さ Z 方向の認識可能な最大部品サイズ(mm)を示します。
照明仕様 各カメラの照明仕様が指定されています。
JSD8013110
サービスマニュアル
第
3
章
3-
11
3
マ
シ
ン
デ
ー
タ
編
集
モ
ー
ド
3.2 画像処理パラメーター
「カメラ」サブメニューから「画像処理パラメータ」を選択すると、下図の
画面が開きます。ここには、画像処理に使われる各カメラのパラメーターが
入力されています。
■ 画像処理パラメータ画面
46310-D8-00
対象名
カメラ 1 スケール(ミクロン)
カメラ 3 スケール(ミクロン)
カメラ 5 スケール(ミクロン)
カメラ 3 スケール変化量
カメラ 5 スケール変化量
カメラ 3 位置変化量
カメラ 5 位置変化量
カメラ 2 スケール(ミクロン)
カメラ 4 スケール(ミクロン)
認識速度
1100.000
1100.000
0.000
0.065
1100.000
Y
10.399
0.000
48.809
0.000
0.282
0.000
1.001
10.428
0.000
X
10.465
0.000
48.828
0.000
0.000
0.000
-3.606
10.489
0.000
分周比
12パルス
8パルス
12パルス
ティーチユニット 速度
- - - - - - - -
対象
画像処理パラメータ
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
メイン
128
同軸
40
サイド
90
A
A
A
A
A
A
A
B
B
対象名 カメラ番号とパラメーター名を示します。カメラ番号は、
「位置座標/ 仕様」画面で指定されていたカメラ番号と同じ
です。
スケール・XY カメラのXY 方向のスケール (1画素当たりのサイズ) です。
(単位はミクロン )
スケール・認識速度 部品認識時にヘッドがマルチカメラ上を動くスピードです。
スケール変化量 ・XY カメラスケールの高さ方向の補正値です。同じサイズの部品
を認識する際、背の高い部品は大きく、背の低い部品は小さ
くカメラに写るのを補正します。 (単位はミクロン )
位置変化量 ・XY カメラ位置を高さ方向で補正します。
位置変化量 ・認識速度 両方向認識オフセット (カメラ上を右方向と左方向に部品を
移動させて認識したときの位置オフセット量)。
分周比 マルチカメラ認識時の分周比が設定されています。
メイン マルチカメラのメイン照明レベル。
同軸 マルチカメラの同軸照明レベル。
サイド マルチカメラのサイド照明レベル。
n
要点
上記パラメーターはマシン調整モードのユーティリティを実行すると自動的に調整されます。