00195193-02 SG D4 FSE en (1).pdf - 第190页
Gantry Overview Pneumatic connectors on the gantry S tudent Guide SIPLACE D4 (FSE) Gantry EN 09/2006 176 Monitoring the position Monitoring the tr ack signals (counter edge spacing) Monitoring the position to the har…
Gantry
Mechanical Structure of X and Y Axes Overview
Student Guide SIPLACE D4 (FSE)
EN 09/2006 Gantry
175
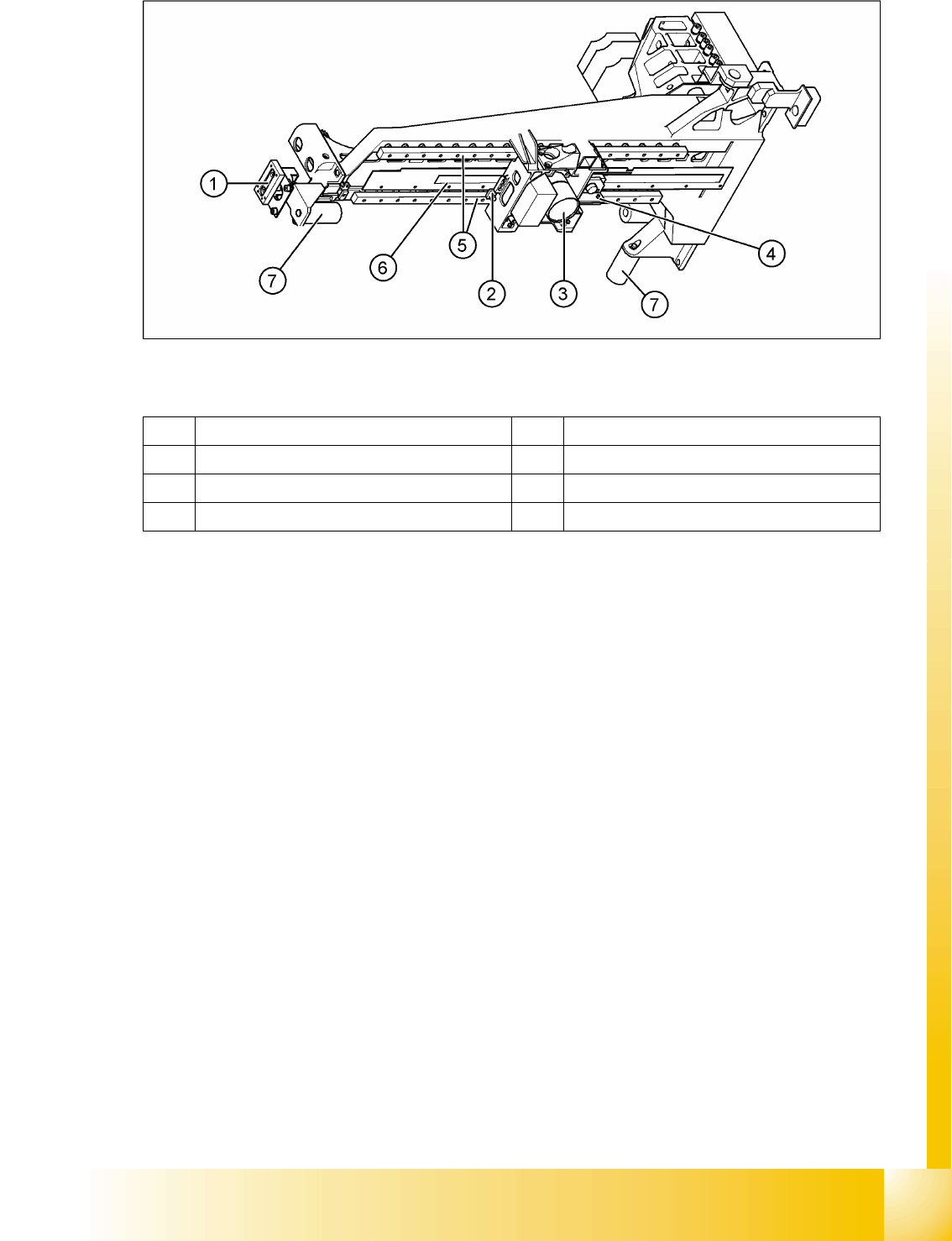
8.1 - 3: Mechanical structure of gantries – part 2 -view from below
Legend
X axis
With the help of a toothed belt drive, the rotary movement of the X-axis motor is directly converted into
a lengthwise movement of the placement head, in the X-direction.
The linear guide rails under the X-axis guide the head assembly plate and the placement head along the
X-axis.
The X-motor is cooled by a fan at the Y-axis pickup position and the motor temperature is also monitored
by a sensor.
Y axis
A linear motor positions the entire gantry (X-axis, head assembly plate and placement head) in the Y-
axis direction. This linear motor consists of a primary and secondary part. The secondary part consists
of permanent magnets, which are fastened lengthwise (Y direction) to the machine frame.
The primary part consists of inductors (motor windings), which are directly fastened to the gantry, in a
casing.
Determining the position
To accurately position the axes, the machine uses incremental scales (metal), which are attached
between the linear guide rails (X-axis or under the secondary part, by the Y-axis).
A corresponding incremental encoder reads the increments from the incremental scales and generates
track signals as a result. The encoder transmits the track signals to the axis control card, which uses the
track signals to determine axis position and to control the motor.
1 Y-axis brake 5 2x linear guide rails, each with a linear bearing
2 X-axis brake 6 X-axis incremental scale
3 Digital PCB camera with optical system 7 Elastomer spring 25x10.5x50
4 X axis read unit
Gantry
Overview Pneumatic connectors on the gantry
Student Guide SIPLACE D4 (FSE)
Gantry EN 09/2006
176
Monitoring the position
Monitoring the track signals (counter edge spacing)
Monitoring the position to the hardware end switches, in accordance with the speed)
Monitoring the two Y axes in one placement area
Additionally each axis has a mechanical end stop (elastomer bumper).
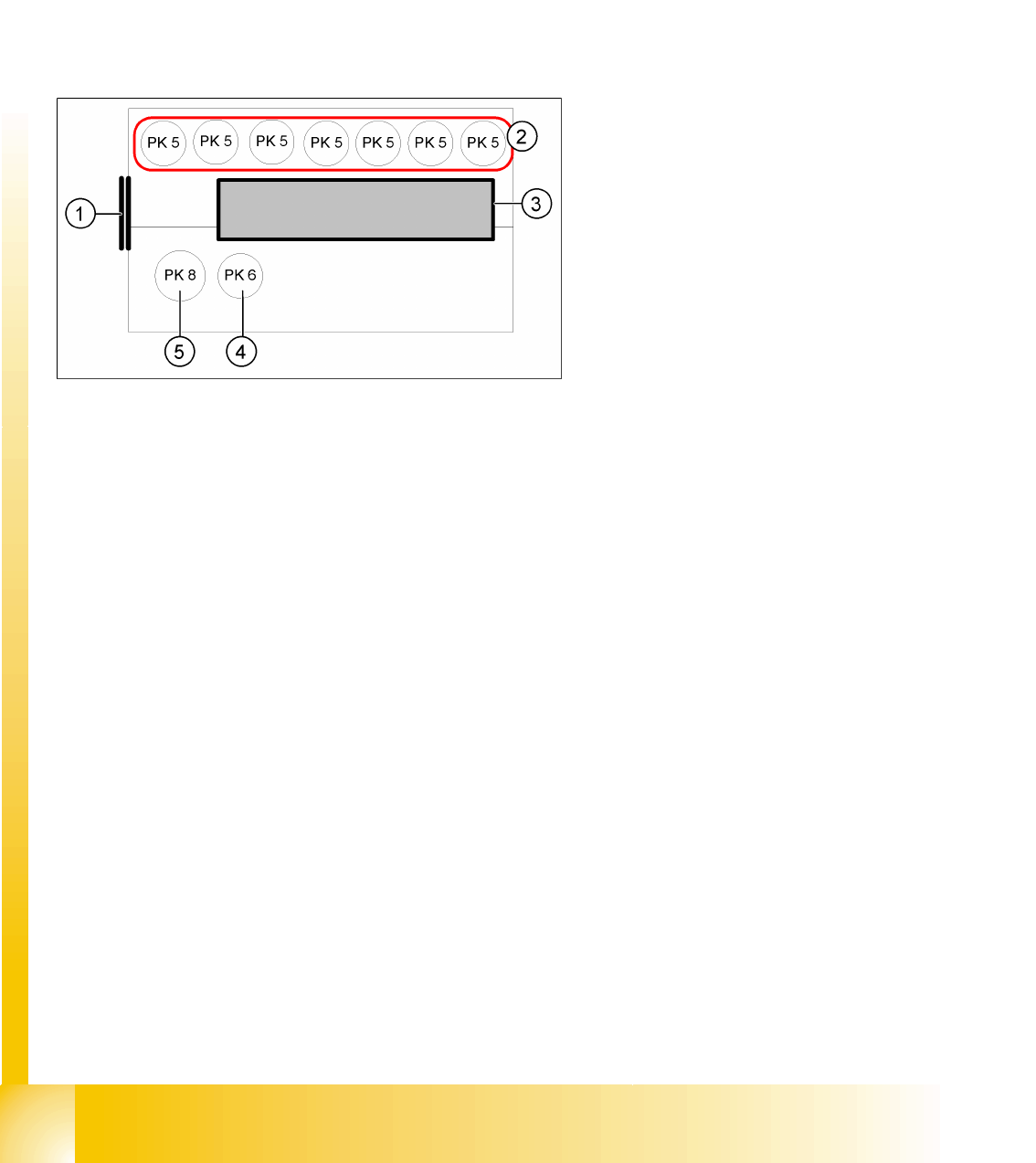
8.1.2 Pneumatic connectors on the gantry
The placement head is supplied with 4.5 bar compressed air from the pneumatic unit. The 7-fold
pneumatic hose is also used to cool the Y-axis motor. The X-axis motor is cooled by the traverse fan.
Legend:
1. Input: Discharged air Venturi nozzle
pneumatic hose (PK12)
2. Input: 7-fold pneumatic hose (PK 5)
3. Silencer for discharged air
4. Compressed air for the pickup / placement
circuit
5. Compressed air for the hold circuit
Gantry
Travel Ranges and Speed Monitoring at the D4 Settings
Student Guide SIPLACE D4 (FSE)
EN 09/2006 Gantry
177
8.2 Settings
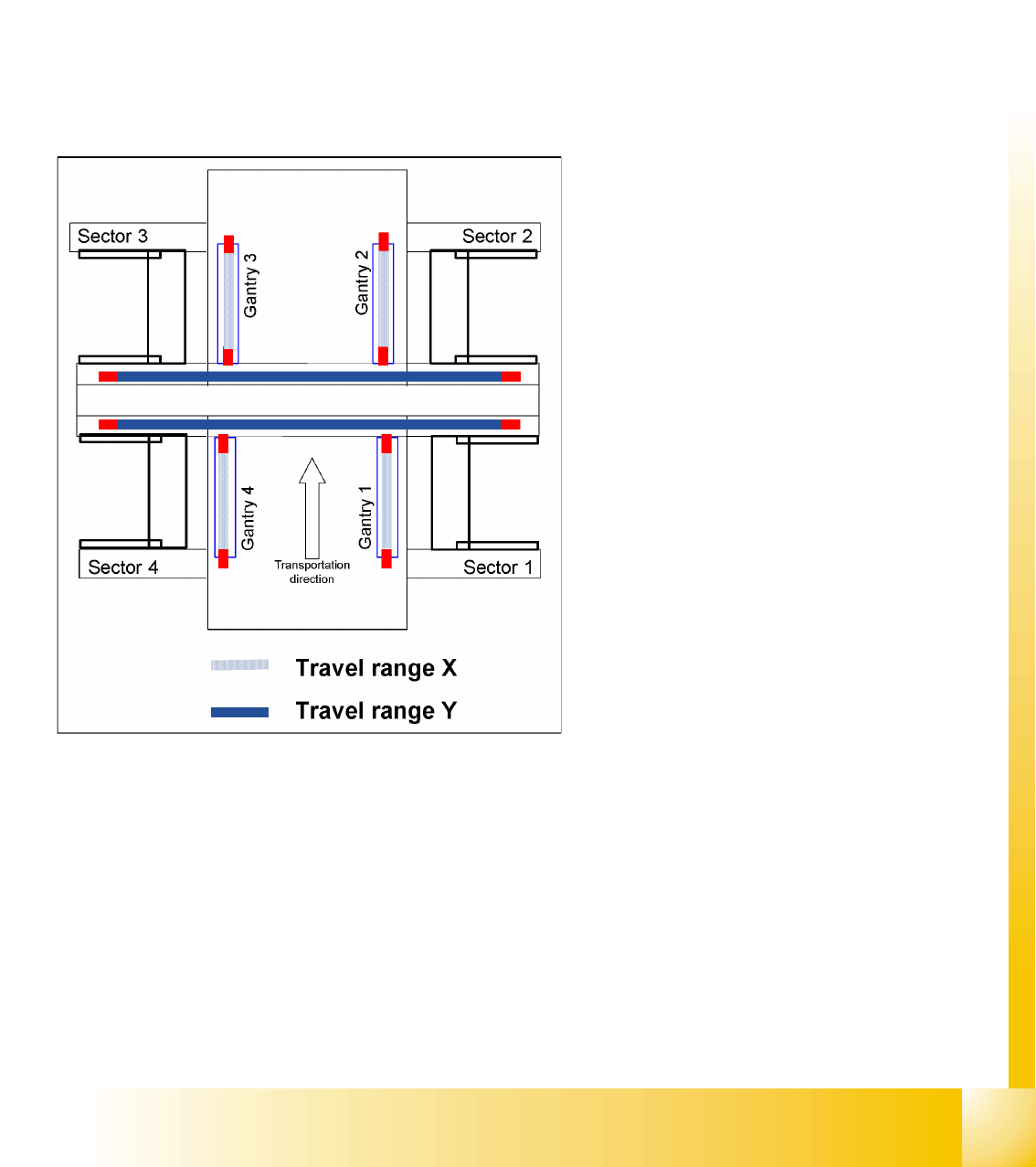
8.2.1 Travel Ranges and Speed Monitoring at the D4
The travel range of the X- and Y-axes is determined automatically with the Sitest program.
This means that, during travel range calibration, the axis concerned moves as far as possible towards
the minimum or maximum position, until the set target value is no longer reached by the axis card. It is
then assumed that the hardware end position switch (bumper) has been reached. In a time window of
approx. 10 ms, the greatest actual value achieved is taken to calculate the travel range.
To guarantee an appropriate safety distance before the hardware end switch is touched, a certain
distance is deducted from the set travel range. This enables the axis to brake in time, even when errors
occur.
The end of the X-axis travel range is + or - 0.5
mm before the software end switch, which is itself
1.5mm before the bumper. A safety distance of 2.0
mm to the bumper is adequate, if the X-axis moves
into this area with excessive speed.
.The end of the Y-axis travel range is + or - 2.0
mm before the software end switch . The Y-axis
travel range for a particular placement area is
monitored in one direction by the software end
switch and a bumper. In the other direction, there
is a permanent exchange of communication
between the axes and their positions, via the SPI
Bus (see description of the anticrash function).