00195193-02 SG D4 FSE en (1).pdf - 第319页
Sitest Basic description of all calibration steps Component camera S tudent Guide SIPLACE D4 (FSE) Sitest EN 09/2006 300 PCB Camera - CO Camera Offset: During measur ement of the segment offset up (I) , the calibration…
Sitest
Travel Range Basic description of all calibration steps
Student Guide SIPLACE D4 (FSE)
EN 09/2006 Sitest
299
12.3.4 Travel Range
12.3.5 Component camera
The Pixel size of the CCD sensors of the camera is determined in µm. Measured and calculated with
Ax/Bx/Cx/Ay/ByCy calibration values. Saved in
camera.xml
as: XU_Pixel / YU_Pixel in nm
The pixel size is:
approx. 150000 nm for CO camera SST 28 (for 12-segment head)
approx. 81000 nm for CO camera SST 29 (for 6-segment head/12-segment head option)
The camera center is determined.
The Mounting angle of the CCD-chip in the camera to the turning level of the placement star is
measured. The value is saved as Kamera_winkel (camera_angle) in the data block of the CO
camera, in the
camera.xml
.
Sequence segment offset top (I):
12.3 - 1: Princple picture of a calibration tool in the camera in 0° (left); in 180°(right).
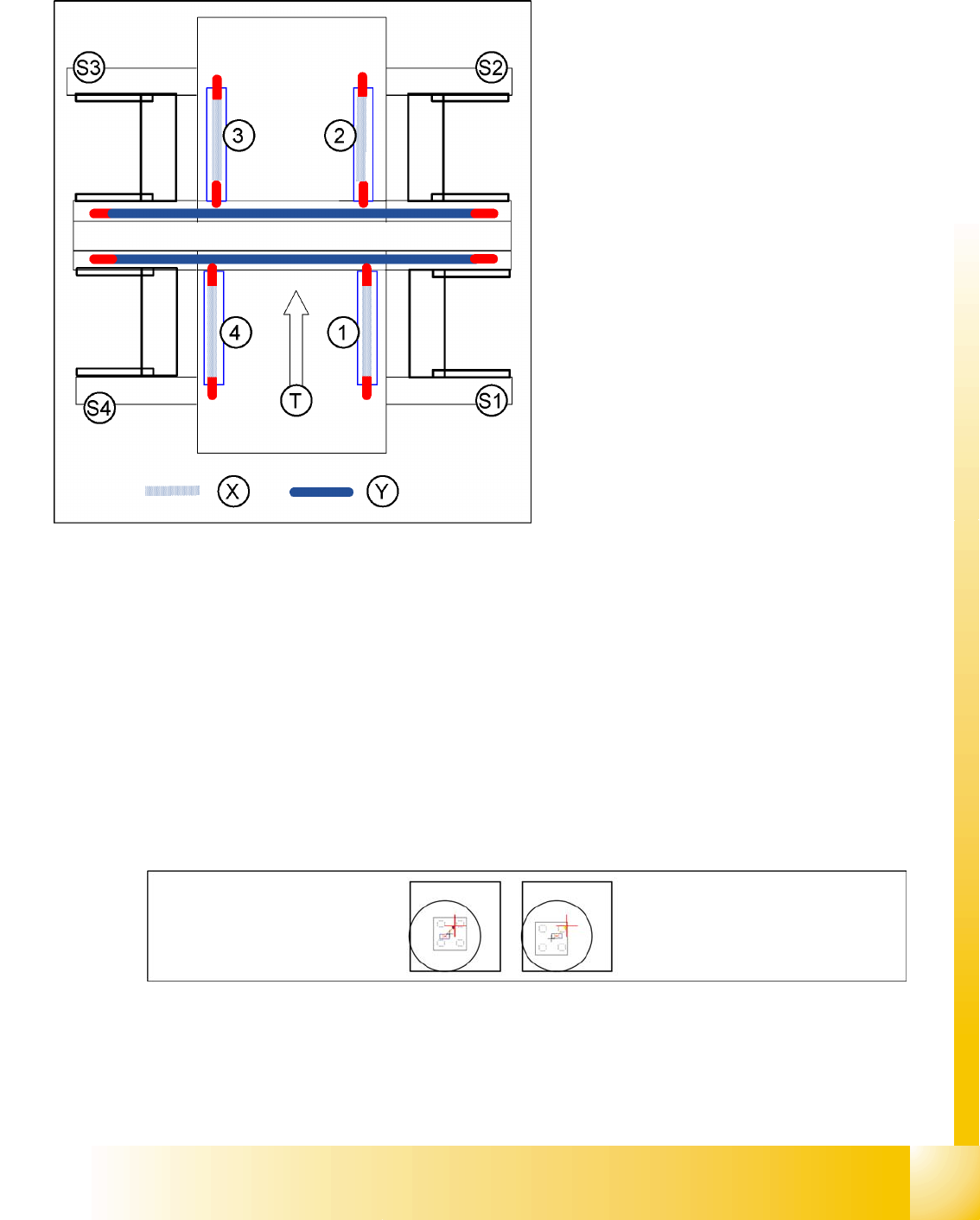
The gantry moves to the zero pulse, to
calibrate the travel range and then moves on
to the HW limit switch. Measure the position
value at the position counter
The software limit switch (Y +/- 1.5 mm,
X +/- 0.5 mm) is calculated.
In the case of the Y axes, only the outer HW
end position switches are approached in each
case. The other end position of the travel
range is calculated.
Legend:
1 - 4: Gantry 1-4
S1 - S4: Sector 1-4
X: Travel range X
Y: Travel range Y
T: Transport direction
Sitest
Basic description of all calibration steps Component camera
Student Guide SIPLACE D4 (FSE)
Sitest EN 09/2006
300
PCB Camera - CO Camera Offset:
During measurement of the segment offset up (I), the calibration of the PCB camera -> CO camera
offset is performed with segment 1:
The distance in X- and Y- direction of the camera centers is determined in µm.
The top segment offset (I) is compared to a calculated average value. (the segment offset I of
segment 1 is therefore no longer 0.)
Segment 1 is the reference point for calculation of the offset (I and II).
This distance is saved in REAL.MA at ‘Kopfoffsets’ at Kopf 1 Kopfoffset_X /..Y. The segment offset
down (II) for segment 1 is 0 (see below).
The segment offsets for the remaining 11 segments are saved in the PIP_OFF.MA file (as deviation
to segment 1).
Deviation in the X and Y direction of the rotary axis for the remaining segments, compared to
segment 1 (in µm).
Measurement is performed at 0° and 180° or 90° and 270° in each case. The center of the segment
is then determined from these 0/180° or 90/270° values.
The values for the segment offset are saved in the PIP_OFF.MA file.
Sequence segment offset bottom (II):
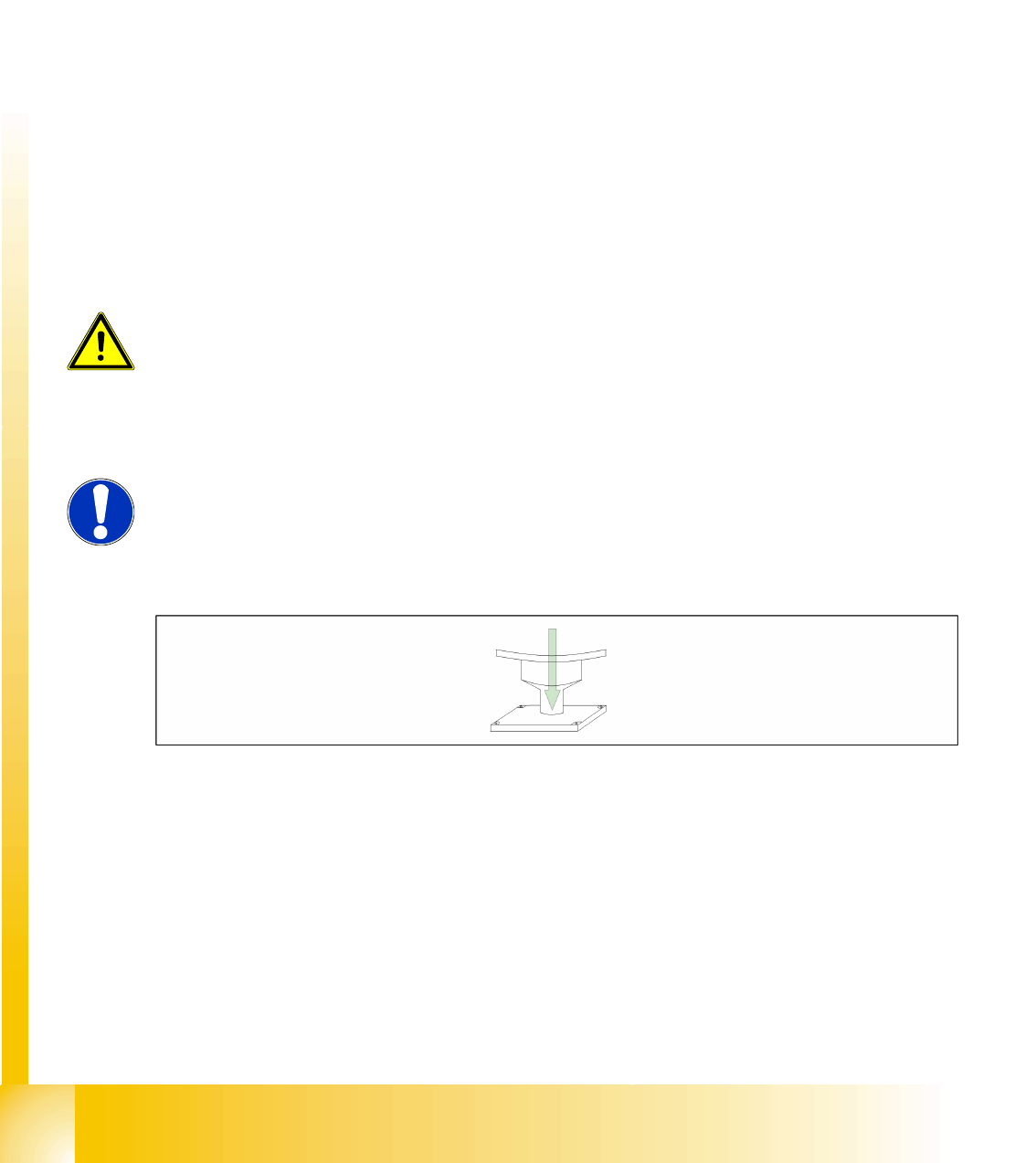
12.3 - 2: Sequence at one nozzle:
After the segment offset up (I) calibration step has been performed, the calibration procedure for the
segment offset down (II) begins for C&P DLM 3:
Is the calibration tool picked with a Nozzle under 0 degree; optically centered and placed with the
PCB-camera is the exact placement position determined (in µm).
Is the calibration tool picked with a Nozzle under 90 degree; optically centered and placed with the
PCB-camera is the exact placement position determined (in µm).
Is the calibration tool picked with a Nozzle under 180 degree; placed with the PCB-camera is the
exact placement position determined (in µm).
Is the calibration tool picked with a Nozzle under 270 degree; placed with the PCB-camera is the
exact placement position determined (in µm).
ATTENTION:
For the segment offset I (top), the standard deviation value should not exceed
600 µm. The difference between the segments must not exceed +/- 150 µm.
Segment offset II (down) absolute threshold +/- 150 µm and difference in values
max. +/- 150 µm.
NOTE:
The segment offset II (bottom), from the first segment is always 0 that is the
reference value to the other segments.

Sitest
Nozzle Changer (C&P head) Basic description of all calibration steps
Student Guide SIPLACE D4 (FSE)
EN 09/2006 Sitest
301
This sequence is repeated. From the 8 placement positions is the average value of the place.
Deviation calculated and taken for the seg. offset.
12.3.6 Nozzle Changer (C&P head)
Each nozzle magazine has an fiducial which will recognize during the calibration procedure at first.
optional, calibrate the pick up height from the nozzle changer.
optional, calibrate the reject position from the nozzle changer, necessary to reject nozzle which are
defekt.
12.3.7 Calibrate and teach machine positions
New function for calibrate the positions is the teach menu before calibrate, so that you can teach the
correct position for a successfull calibration.
12.3.7.1 Conveyor sides
This new calibration procedure is necessary for the modular conveyor system.
With the modular conveyor are all conveyor sides adjustable. For adjustment the conveyor sides we use
one stepper motor which is connected via a toothed belt to the driver unit. The position of the conveyor
side is recognized by a proximity switch, meaning that there is a switching point for each conveyor side.
With this calibration the switch points are optimized of the entire travel range of the width adjustment.
Calibration is required to ensure that the two adjustment drives move the conveyor sides parallel to one
another.
Automatically Sequence (Transport mapping):
Initialize the driver unit, move to the right side (limit switch)
Driver unit recognize the fixed conveyor side (sides dual conveyor) move the conveyor sides a
standard position of 55mm.
The driver unit moves the conveyor side(s) step-by-step (10 mm steps) and determines the offset of
the switching points for the two driver units in the various conveyor side positions.
This calibration of the side position will be done for width adjustment wider and smaller.
The results are saved in the conveyor controller as correction values and taken into account later
when setting and measuring the conveyor width.
12.3.7.2 Conveyor width calibration
The conveyor width offset can be determined by using a board with a width of your choice. This width
must be entered by the operator. This ensures that a consistent predefined tolerance (offset) is used
between the conveyor sides, for the various different conveyor widths, thus preventing the boards from
getting jammed.
ATTENTION:
Before starting calibration of the nozzle changer, check the nozzle changer
configuration and the component level.
NOTE:
Calibration needs to be performed for lanes 1 and 2.