00195193-02 SG D4 FSE en (1).pdf - 第54页
Overview General Overview of Assemblies Gantry S tudent Guide SIPLACE D4 (FSE) Overview EN 09/2006 54 3.2.6.2 S tructure of the X axis 3.2 - 7: X-axis construction Legend The following modules are ins talled on the head …
Overview
Gantry General Overview of Assemblies
Student Guide SIPLACE D4 (FSE)
EN 09/2006 Overview
53
3.2.6 Gantry
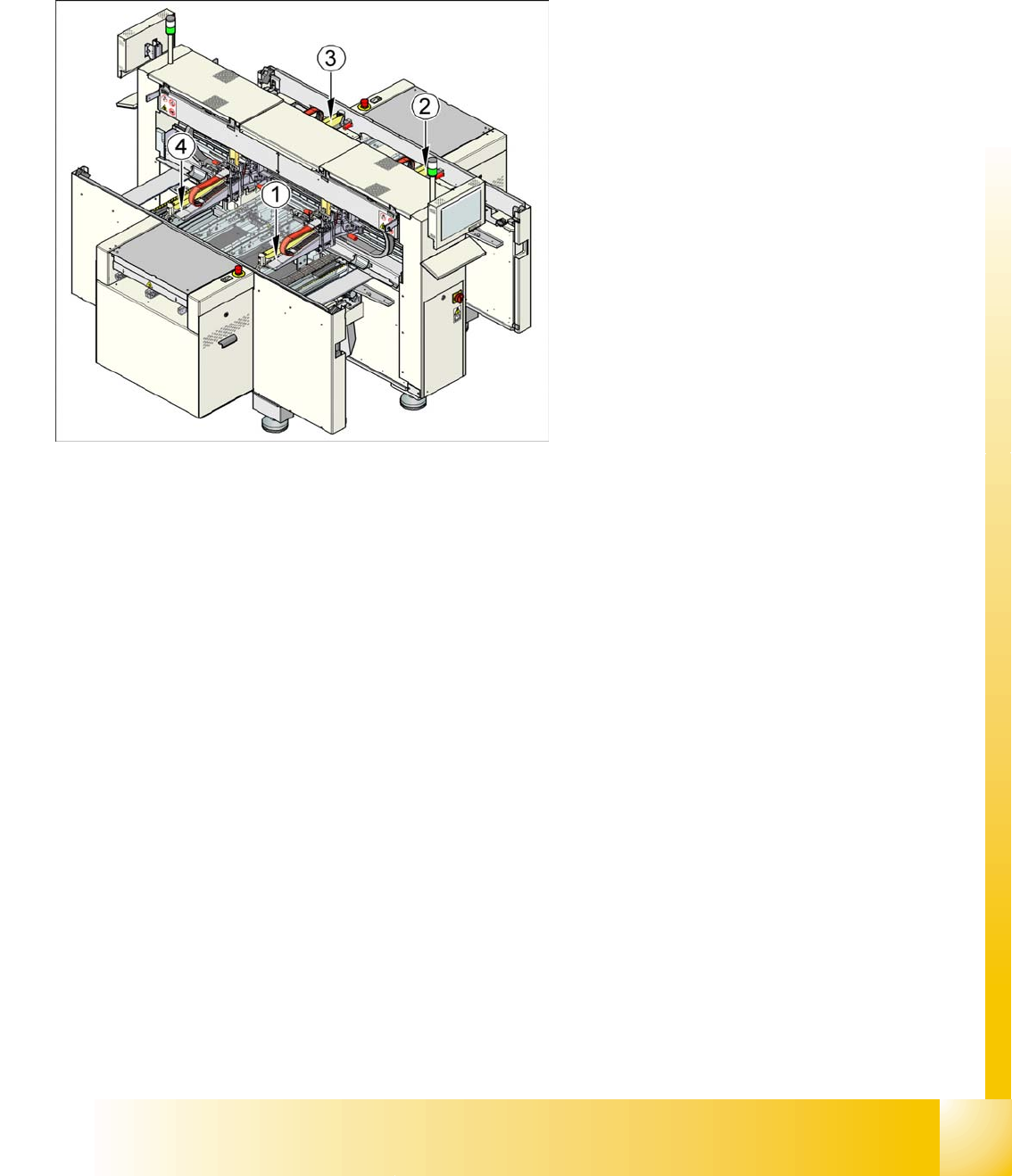
3.2.6.1 General
The placement machine is equipped with four gantries. These are used to accurately and independently
position the four C&P heads in the X and Y directions.
Due to their construction, the gantries are resistant to buckling. The precise mechanical guidance of the
axes is achieved with the aid of ball bearing units.
Precise distance measuring systems determine the position of the X and Y axes. This involves the
optoelectronic detection of marker lines on the incremental scales and the transmission of the track
signals to the axis control point in the control unit.
Direct drive techniques are then used to position the placement heads in the X and Y directions. This
prevents the typical frictional loss which occurs when complex drive systems are used. This solution also
avoids the wear and tear which can significantly impair the accuracy of positioning systems over time.
X-axis drive
With the help of a toothed belt, the rotary movement of the X-axis motor is directly converted into a
lengthwise movement of the placement head, in the X-direction.
Y-axis drive
A linear motor moves the placement head lengthwise, in the Y direction.
Legend:
1. Gantry 1
2. Gantry 2
3. Gantry 3
4. Gantry 4
Overview
General Overview of Assemblies Gantry
Student Guide SIPLACE D4 (FSE)
Overview EN 09/2006
54
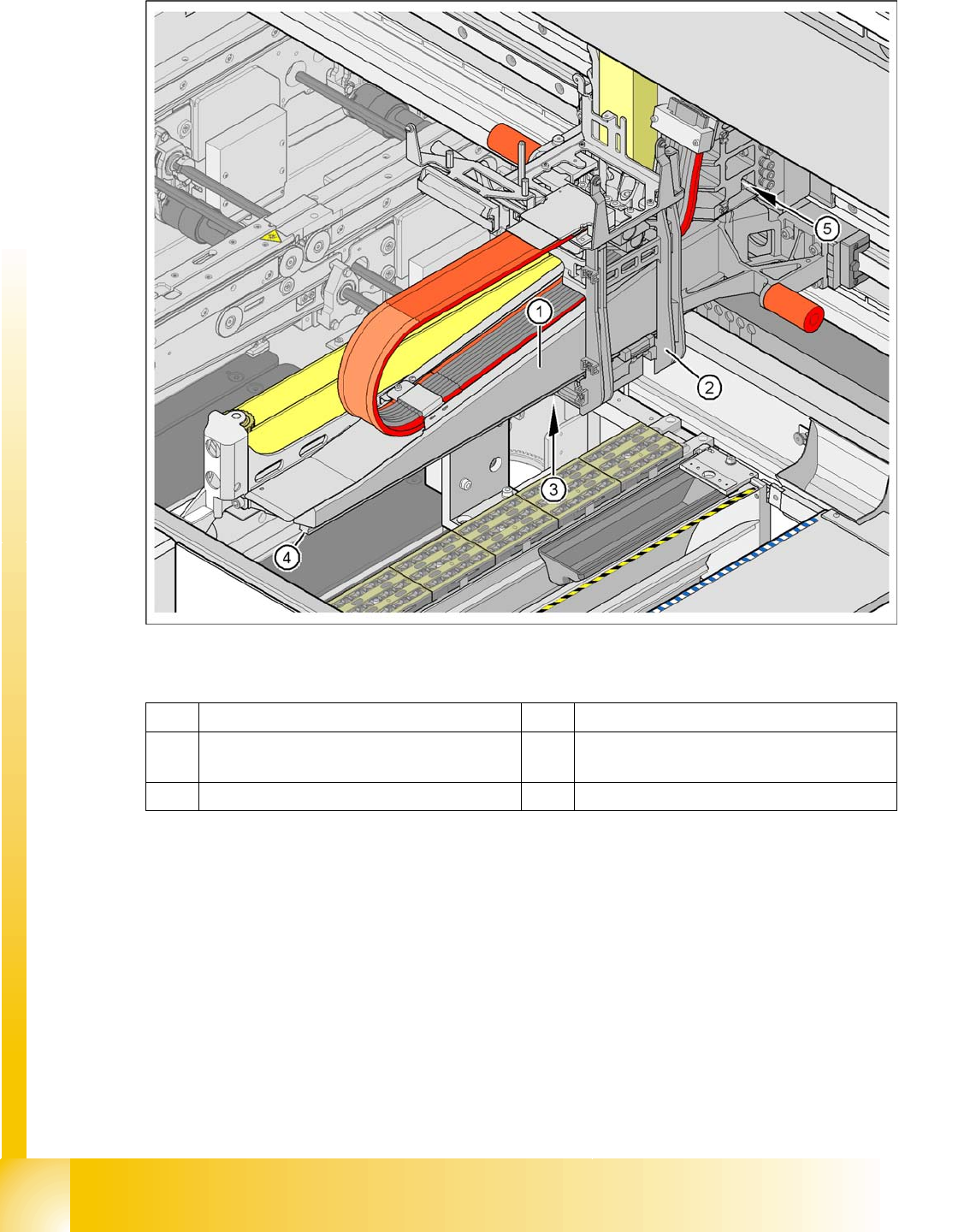
3.2.6.2 Structure of the X axis
3.2 - 7: X-axis construction
Legend
The following modules are installed on the head holder:
PCB camera
Gantry head distributor
Vision board
16 bit processor board (TQ module)
Incremental encoder
C&P12
1 Gantry arm 4 X-axis guidance system
2 Head holder 5 Three-phase current servo motor with toothed
belt
3 Linear measuring system
Overview
Gantry General Overview of Assemblies
Student Guide SIPLACE D4 (FSE)
EN 09/2006 Overview
55
3.2.6.2.4 X-Axis Technical Data
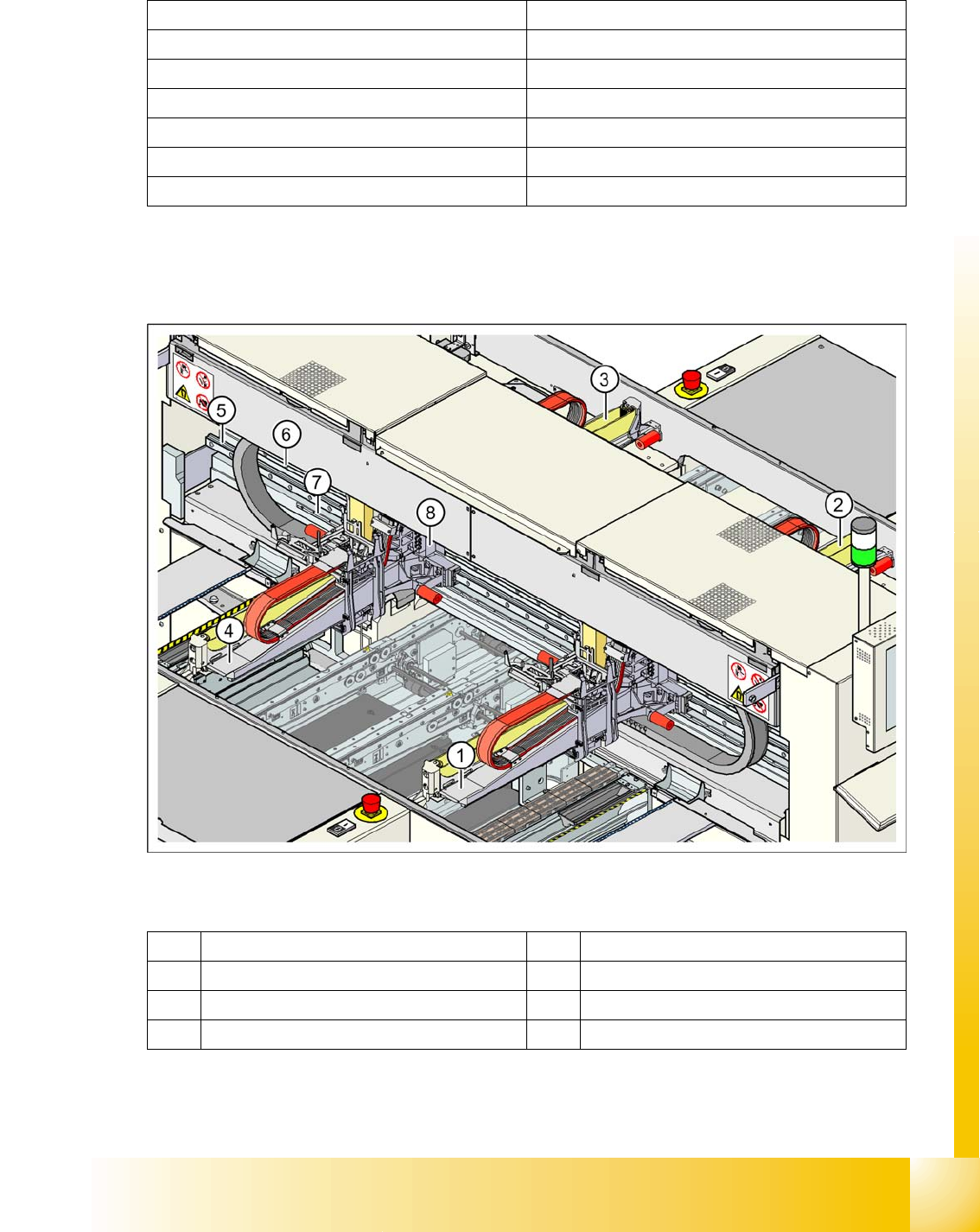
3.2.6.3 Structure of the Y axis
3.2 - 8: Y-axis construction
Legend
Drive Three-phase current servo motor/toothed belt
Maximum speed 2.5 m/sec.
Traversing path 375 mm
Distance measuring system Incremental scale
Measurement length 400 mm
Scale length 420 m
Resolution 1 µm
1 Gantry 1 5 Guide system
2 Gantry 2 6 Linear motor secondary part
3 Gantry 3 7 Measuring system
4 Gantry 4 8 Linear motor primary part