CP-6-series Mechanical Reference.pdf - 第49页
2.1.5 The T wenty Stations Functions of the 20 Stations The 20 placing head positions are each assigned a station number. Each of these stations has a special function, as explained below. Station 1 : The head picks part…
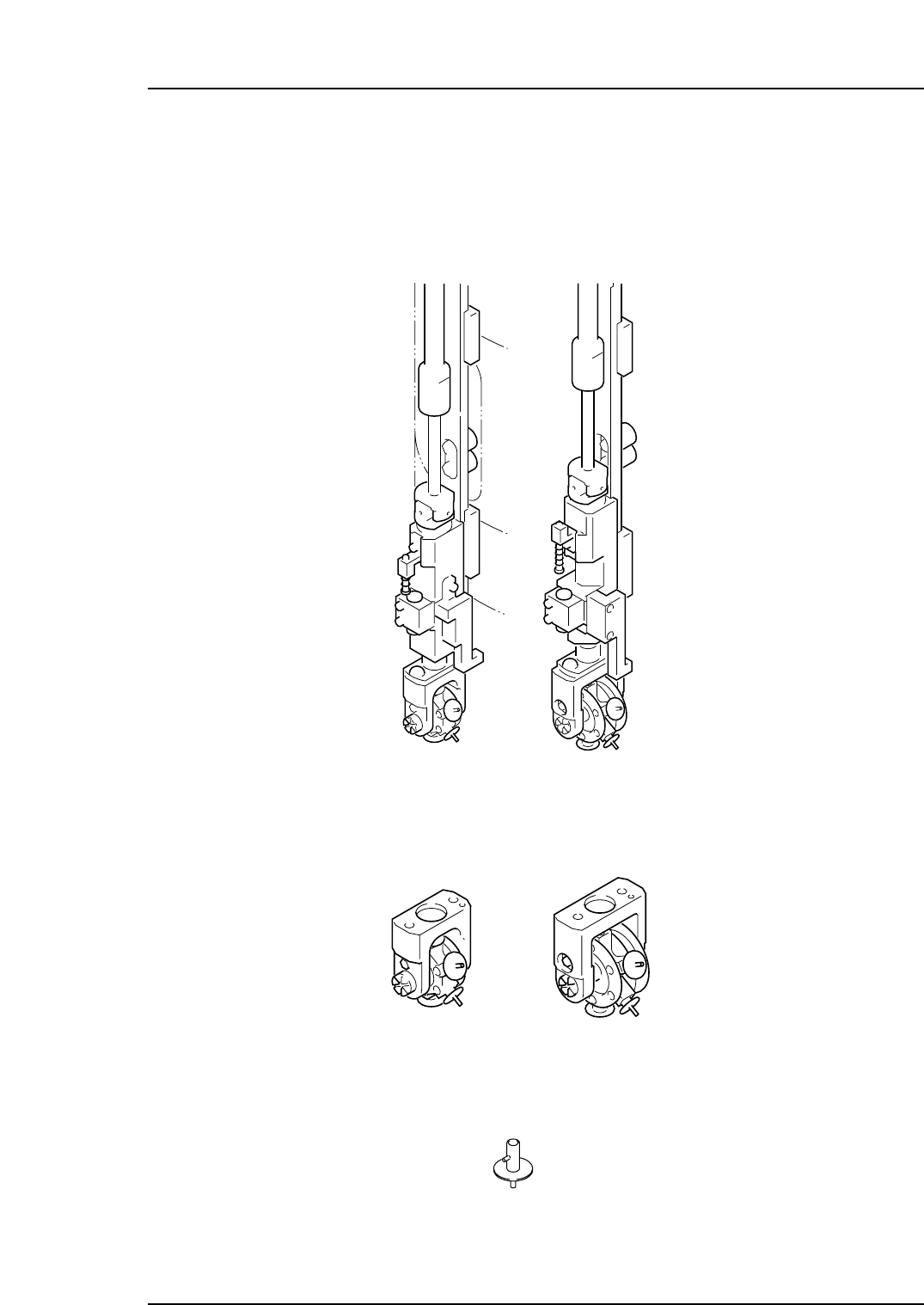
2.1.4The Placing Head
The Head
The head has a holder attached as shown below.
The Holder
The holder has the nozzle assembly attached as shown below.
The Nozzle
The nozzle picks parts using suction force which is supplied by a vacuum situated at the
rear of the machine.
CP6M1022
(4000 TYPE) (5000 TYPE)
CP6M1021E
(4000 TYPE) (5000 TYPE)
CP6M1020E
Part 1 Chapter 2 Functions of Each Component
Edition 1.1 1-2-9 CP-6-series Mechanical Reference
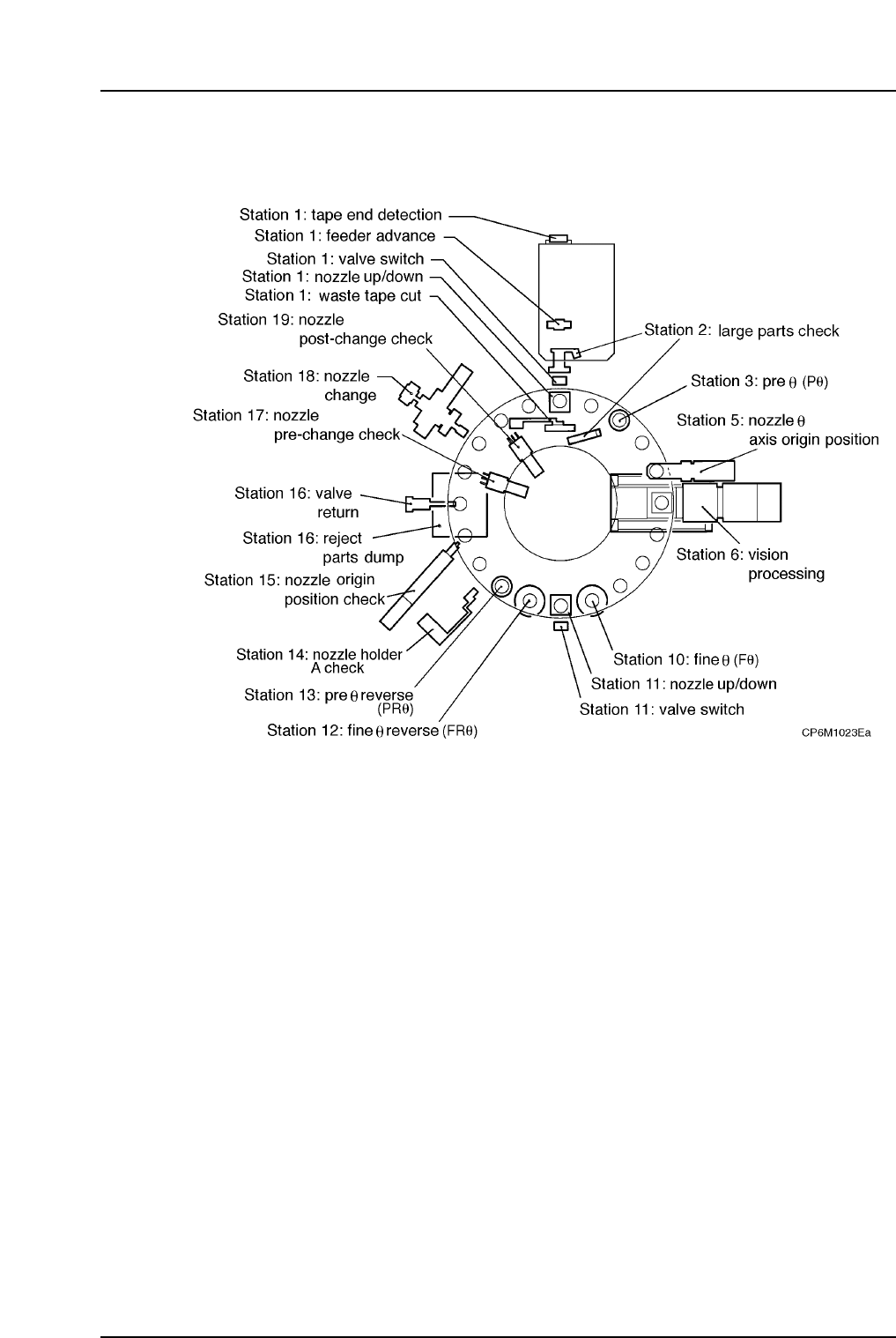
2.1.5The Twenty Stations
Functions of the 20 Stations
The 20 placing head positions are each assigned a station number.
Each of these stations has a special function, as explained below.
Station 1 : The head picks parts from the feeder, advances the feeder tape and
checks for the tape end.
Station 2 : A sensor checks for the pick-up of large parts.
Station 3 : The machine performs pre-theta (Pθ) adjustment. Pre-theta rotates
the part only +90° or -90° depending on the value that is set in the
program. After vision processing is carried out at station 6, fine
theta (Fθ) rotation is carried out at station 10. Because only slight
rotational adjustment is performed in fine-theta, placement speed is
faster and part slippage is minimal.
Station 5 : The placing head is rotated back to the position where it was prior
to St3 Pθ-angle rotation.
Station 6 : Either the wide or the narrow view CCD camera checks whether or
not the part was picked and if the part shape is correct.
Station 10 : Fine theta (Fθ) adjustment is carried out. The results of vision
processing, final adjustments are carried out using servo-motor to
the placing angle.
Part 1 Chapter 2 Functions of Each Component
Edition 1.1 1-2-10 CP-6-series Mechanical Reference

Station 11 : The machine places the part on the board. If the vision processing
declares that the part is no good (NG) at station 6, the part is not
placed.
Station 12 : Fine-theta reverse is performed. The angle of theta rotation that
was performed at station 10 is now performed in reverse.
Station 13 : Pre-theta reverse is performed. The angle of theta rotation that was
performed at station 3 is now performed in reverse.
Station 14 : The nozzle holder's A-position (for production information) is
checked.
Station 15 : Check to verify that the nozzle has returned to its origin position.
Station 16 : Part which failed vision processing at St6 (and was therefore not
placed) is discarded.
Station 17 : Nozzle position pre-change checks are performed for six nozzles.
Station 18 : Nozzle change is performed using a servo motor.
Station 19 : Nozzle position post-change checks are performed for six nozzles.
Part 1 Chapter 2 Functions of Each Component
Edition 1.1 1-2-11 CP-6-series Mechanical Reference