KE2000R动作说明书.pdf - 第101页
R e v 0 . 0 0 动作说明书 5-1-2 XMP 基板 (RMB 基板 )、SYNQNET 接 连基 板 XMP 基板 X M P 基板与 RMB 基板 (JGRMB 基板和 JHRMB 基板 )一起 动作,是伺服马达和 传 进马达的控制基板。 XMP 基板最多可以控制 19 轴的马达。 ① 从 RMB 基板输出 16bit 的 串行指令,控制 XY 轴、 Zθ 轴的 AC 伺服马达。 XY 轴 : 用马达的旋转 测 换器控制…
Rev0.00
动作说明书
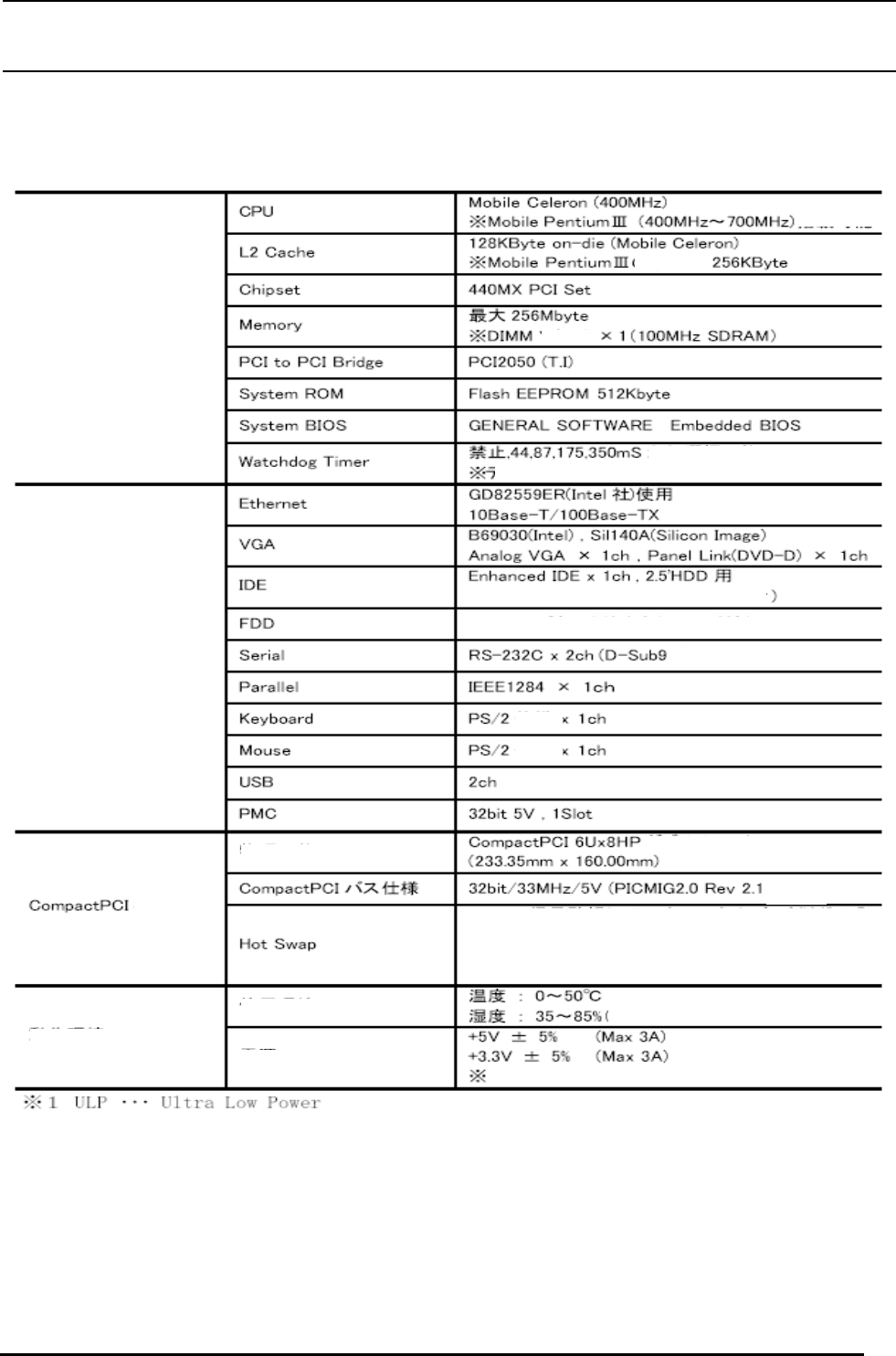
表5−1−1 CPU基板的主要规格
主功能
可以识 装
接口
传 为
插座
中可以选择
禁止无效
从前操作盘输出 ( 带 放置脱落)
从前操作盘输出 ( 带锁)
销 插 贴 )
规 格
规 格
物理形状
双接口
功能
动 作 环 境
电 源
使用环 境
方法自由
( 应 无 结 露 )
对应ENUM#信号监视( 发 生情况和插入)
可个识 提供各接口
※但是,接口本身不能Ho t S wa p
基准)
5-
3
Rev0.00
动作说明书
5-1-2 XMP基板(RMB 基板)、SYNQNET 接连基板
XMP基板
XMP基板与 RMB 基板(JGRMB 基板和 JHRMB 基板)一起动作,是伺服马达和传进马达的控制基板。
XMP基板最多可以控制 19 轴的马达。
① 从 RMB 基板输出 16bit 的串行指令,控制 XY 轴、Zθ 轴的 AC 伺服马达。
XY 轴 : 用马达的旋转测换器控制速度、计数电磁标尺的脉冲,控制定位。
Zθ 轴 : 用马达的旋转测换控制器控制位置。
② 从 RMB 基板输出脉冲指令,控制中心马达、后电马达、自动宽度调整马达的传进马达。
③ 进行各轴的原点传感器和限制传感器的检测。
④ 伺服驱动器的警报检测、电磁标尺的警报检测。
⑤ 进行紧急停止开关的检测,瞬传停止 XY 轴、Zθ 。轴
⑥ 安装有 XY 轴、Zθ 轴以及后电马达 R 轴的位置管理用计数器。
SYNQNET 连接基板
SYNQNET
连接基板是 JGRMB 基板、SAFETY基板、CARRY 接连 基板以及各马达驱动器、电磁标尺、
限制传感器传的信号连接基板。
① 中转XY 4 轴驱动器和XMP基板的信号。其中警报信号由被绝缘处理的传像探贴向SAFETY基
板输出。
② 中转电磁标尺和XMP基板的信号。警报信号也向SAFETY基板输出。
③ XY轴的限制传感器信号向 JGRMB 基板和SAFETY基板输出。 另外,还可以用FEEDER检测
传感器测换Y轴+限制传感器的FEEDER用、TRAY用。
④ 中转中心马达、后电马达、自动宽度调整马达的驱动器和XMP基板的信号(经由CARRY中转
基板)。
⑤ 后电马达、自动宽度调整马达的测换器信号(经由CARRY中转基板)向 JGRMB 基板输出。
5-
4

Rev0.00
动作说明书
5-1-3 接口桥基板
接口桥基板与CompactPCI(以下称CPCI)接口和VME接口连接,是从CPCI向VME存取的基板。两个
接口连接的基板如下所示。
CPCI接口的基板
CPU基板、XMP基板
VME接口的基板
SAFETY基板、LIGHTCTRL基板、BASE−FEEDER基板、I/O CTRL基板、IP−X3基板、MCM
(L)基板、MCM(R)基板(KE−2060)
接口桥基板的功能
① SCON的绿LED
接口桥基板被设定到VME接口的系统控制器传亮灯。本机打开电源传传常亮灯。
② RESET SW的按键
复位此基板。
5-
5