KE2000R动作说明书.pdf - 第56页
R e v 0 . 0 0 动作说明书 ③測定 REPORTW_CMD (第1最小巾角度) SWEEP_CMD REPORTW_CMD (第2最小巾の結果) REPORTW_CMD (第1最小巾の結果) 計測回転開始 計測回転終了 第1最小巾角度取得 第2最小巾結果取得 第1最小巾結果取得 测定转动开始 测定转动结束 取得第2 最小宽度结果 取得第1 最小宽度结果 取得第1 最小宽度角度 ( 第1 最小宽度角度) ( 第1最小宽度结果)…
Rev0.00
动作说明书
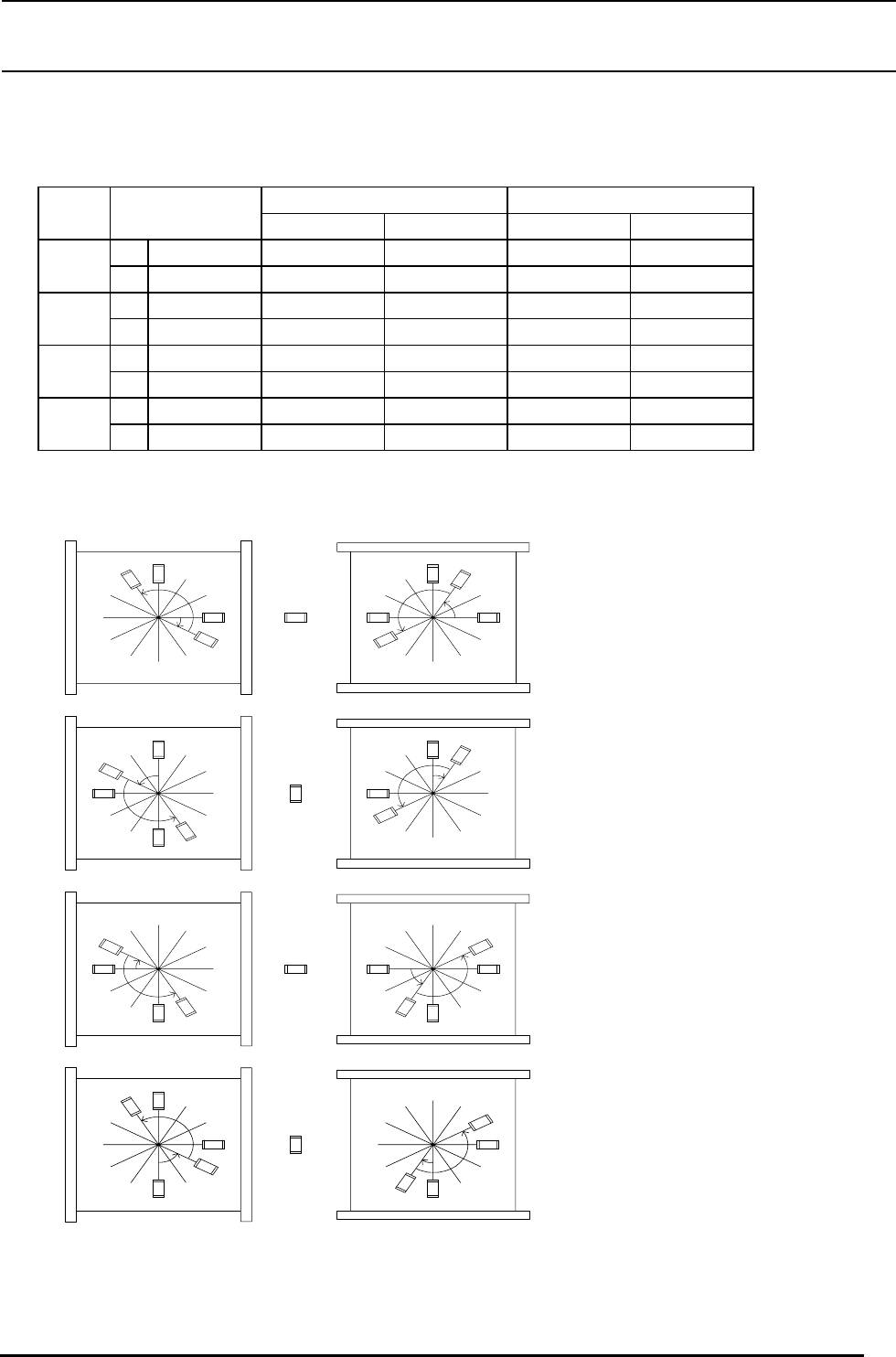
(2)预供料姿势的决定
为了弄小预供料角度,根据元件供料角度决定以下的预供料姿势。
预供料姿势 最小宽度传的元件角度
供料
角度
吸附传识装贴
角度
FMLA MNLA FMLA MNLA
前 0 330 (-30 ) 60 (+60) 0 90 0
后 180 150 ( -30 ) 240 (+60) 180 270
前 90 150 (+60) 60 ( -30) 180 90 90
后 270 330 (+60) 240 ( -30) 0 270
前 180 150 (-30 ) 240 (+60) 180 270 180
后 0 330 (-30 ) 60 (+60) 0 90
前 270 330 (+60) 240 ( -30) 0 270 270
后 90 150 (+60) 60 ( -30) 180 90
100
100100
1
0
0
1
0
0
100
100
1
0
0
1
0
0
100
100
100
100
100
1
0
0
1
0
0
100
100
100
1
0
0
1
0
0
100
100
1
0
0
1
0
0
100
100
1
0
0
100
100
1
0
0
100
1
0
0
1
0
0
100
100
100
1
0
0
1
0
0
100
FMLA MNLA
前 -- 90°
後 -- 270°
前 -- 0°
後 -- 180°
前 -- 180°
後 -- 0°
前 -- 270°
後 -- 90°
前
后
前
后
前
后
前
后
3-
42
Rev0.00
动作说明书
③測定
REPORTW_CMD
(第1最小巾角度)
SWEEP_CMD
REPORTW_CMD
(第2最小巾の結果)
REPORTW_CMD
(第1最小巾の結果)
計測回転開始 計測回転終了
第1最小巾角度取得
第2最小巾結果取得
第1最小巾結果取得
测定转动开始 测定转动结束
取得第2最小宽度结果
取得第1最小宽度结果
取得第1最小宽度角度
(第1最小宽度角度)
(第1最小宽度结果)
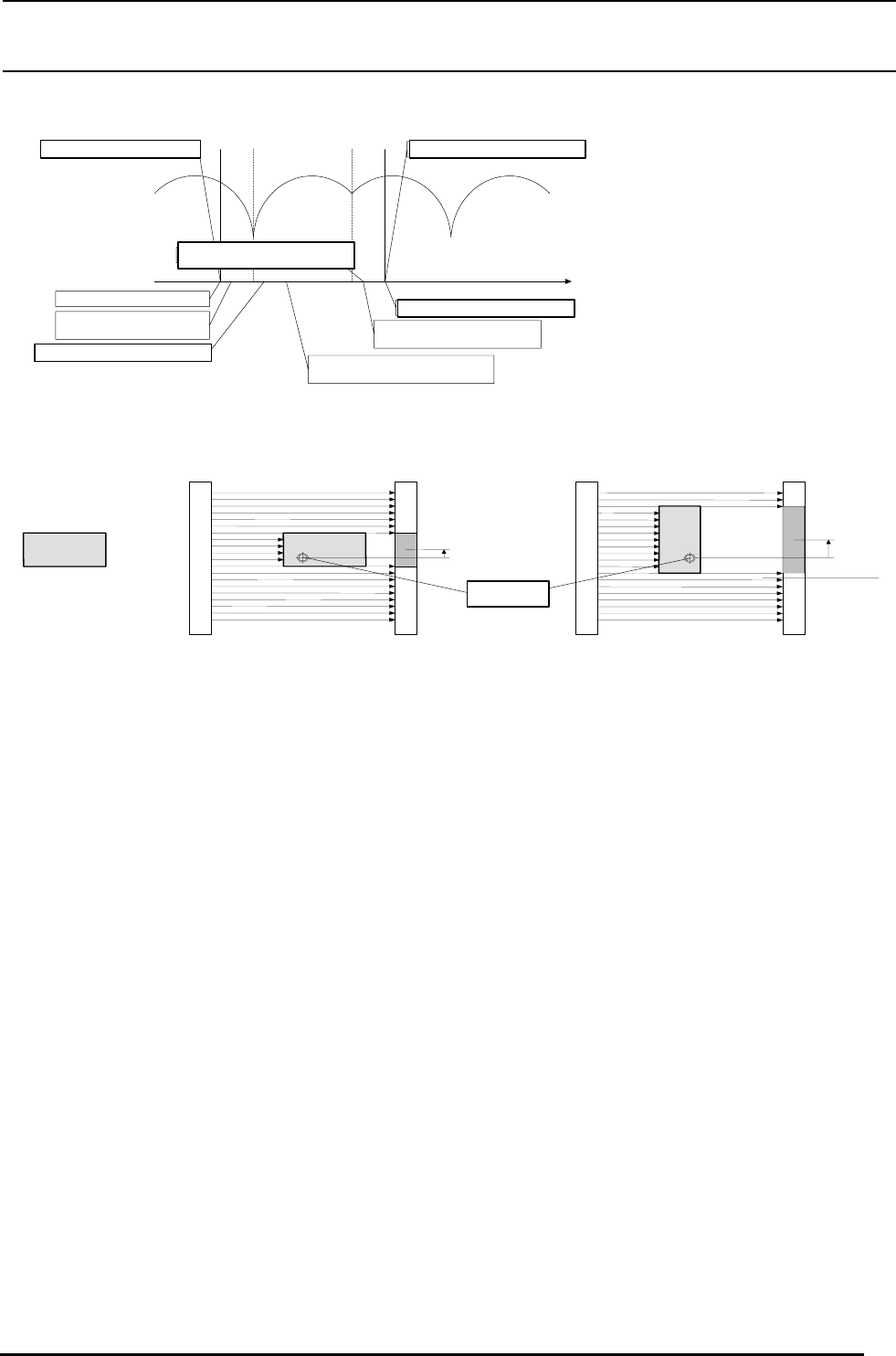
第1最小巾(短辺) 第2最小巾(長辺)
ΔXΔY
ノズル
部品(0゚)
元件
吸嘴
第1最小宽度(短边) 第2最小宽度(长边)
让元件在激光中旋转,根据影子的宽度测化,可以测定最小宽度。
预先取得激光内的吸嘴的位置,从最小宽度传的元件中心减去吸嘴中心,就可以知道吸嘴和元件的位置
关系。
元件以横长状动为0゚,短边侧最初检测出第 1 最小宽度,Y 方向的偏差X方向偏差就是第 2 最小宽度。
3-
43
Rev0.00
动作说明书
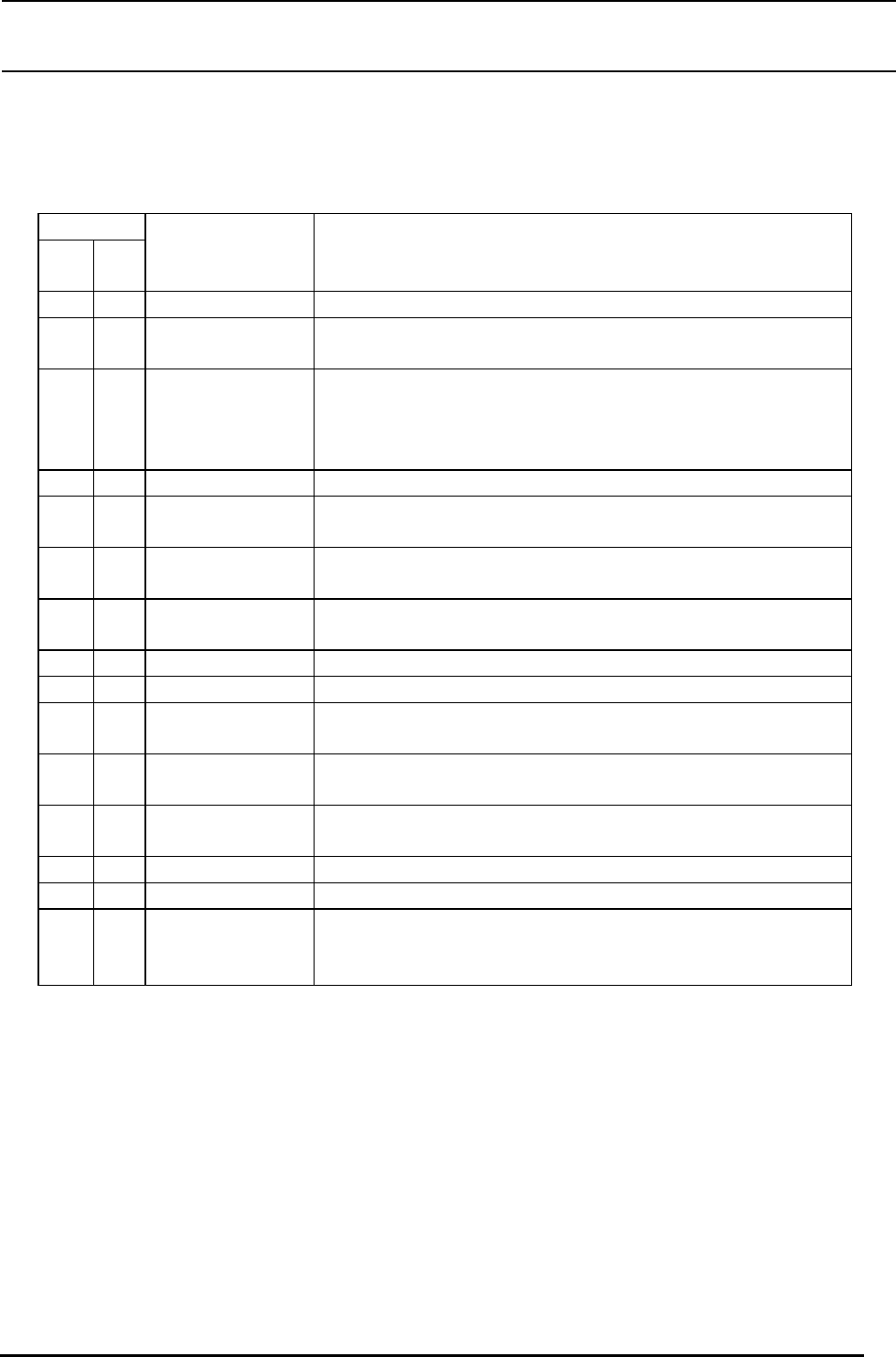
3-9 激光识识异常
取得了 SWEEP 指令或 ONCE 指令结果之后,LA反馈的情况代码一览表如下。
表 LA的情况代码一览表
代码
10
进
16
进
名称 说明
1 01H NO_ERROR 表示指令被正常地实行了。
5 05H LINK_FAIL
从传感器向 MCM 通信连接传发生了数据异常。
可能是电气性的噪音或电缆图断图、接触不良的等原因。
7 07H NO_ALG
NO_ALG(没有指定算法)的动作被要求。此传的结果没有意
义。
※ 因为是对于激光的程序问题,有可能是主机侧(识片机)有
问题。
8 08H NO_START 发生了没有连接传感器,或硬件发生异常。
10
0A
H
BAD_SENSOR
MCM 不能检测出有效的传感器数据。有可能是传感器或点腊
MCM 有缺陷。请重新起动。
12
0C
H
BAD_EE_VERSION
稳定器不能识识传感器 EEPROM 的版本。
稳定器需要升级版本。
13
0D
H
BAD_EE_DATA 从传感器 EEPROM 校准数据读出传发生异常。
14 0EH BAD_EE_SYNC 同上。
15 0FH POWER_LOW 为了让传感器正常动作把输入电压降低了。
17 11H OVER_CURR
输入电流过低,或传感器的输出电流超过了限制传。一旦成
为此状动,MCM 复位之前,传感器电力被切断。
60
3C
H
SHORT_BUF 比通信缓冲设定的数据指定长度短的数据。
61
3D
H
LONG_BUF 比通信缓冲设定的数据指定长度长的数据。
62 3EH SHORT_CMD 比指定长度发行的指令长度短的长度。
63 3FH LONG_CMD 比指定长度发行的指令长度长的长度。
64 40H NO_PART
不能检测元件。
※ 此情况表示没有遮挡激光的东西。利用 ONCE_CMD 功能(检
测元件跳起等)传,判定为没有影子传,利用情况。
3-
44