KE2000R动作说明书.pdf - 第24页
R e v 0 . 0 0 动作说明书 3-3-2 无θ修正 传 ノズル返却動作 ノズル装着動作(θ補正有無共通) 1 1 2 2 3 3 4m s 4 5 5 6 6m 7 7 8m s 8 ス ラ イ ト ゙ フ ゚ レ ー ト 9 9O p e n セ ン サ m s 10 ms 10 11 ms 11 12 12 ms 13 13 14 14 15 15 16 17 18 19 20 21 6 5 項目 動作 備考 ノズル…
Rev0.00
动作说明书
3-3 吸嘴更换动作
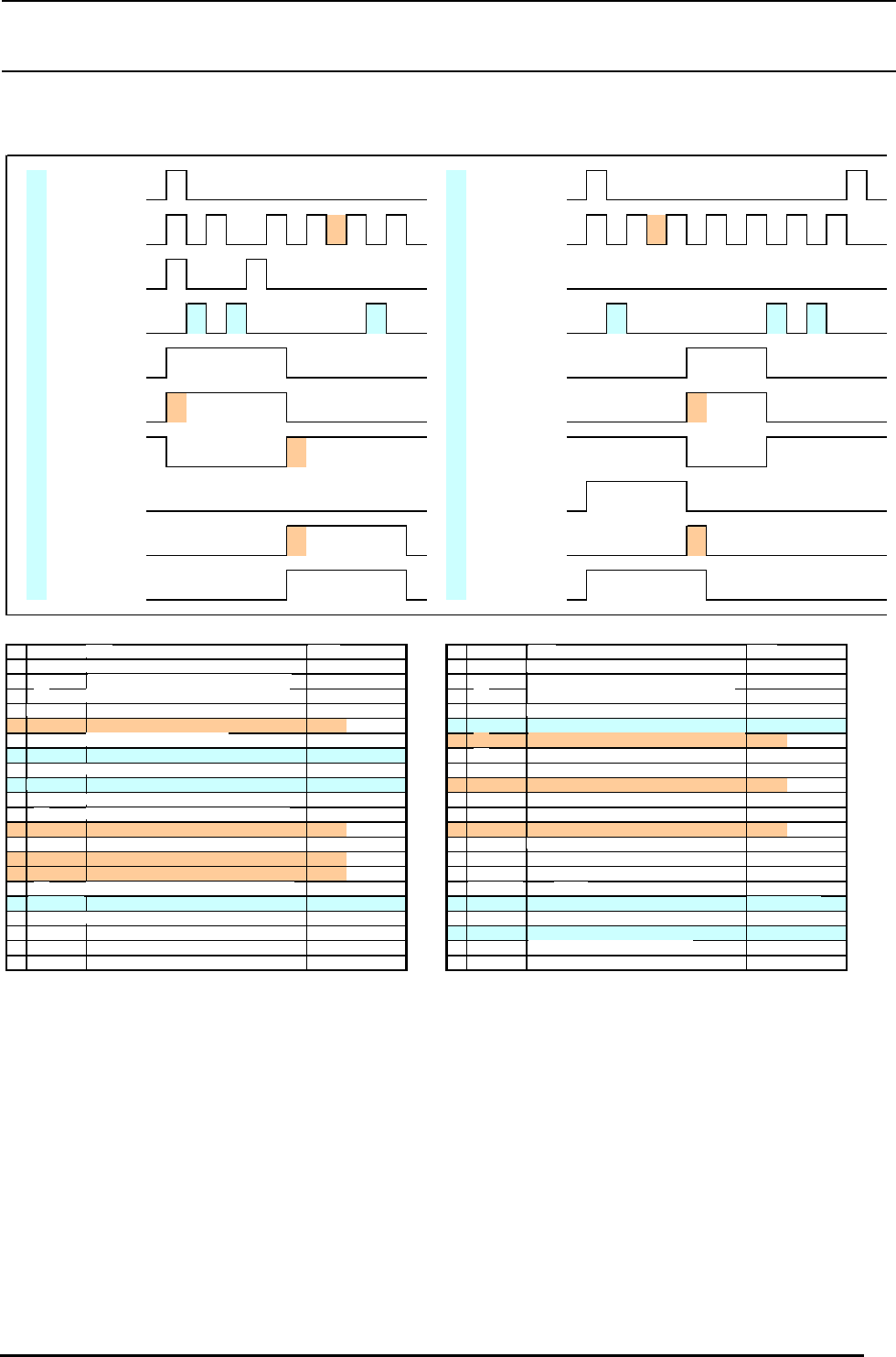
3-3-1 有θ修正传
ノズル返却動作(θ補正有) ノズル装着動作(θ補正有無共通)
1 1
2 2
3 3
4 4
5ms5
6 6m
7 7
8 8スライドプレート
9 9 Openセンサ ms
10 10
11 11
12 ms 12 ms
13 13
14 ms 14
15 ms 15
16 16
17 17
18 18
19 19
20
21
6
7
スライドプレート移動高さへ移動(開始∼完了)
Off
ノズルNoチェック
ノズル装着チェック
Wait D 20
Wait A 100
ノズル有無チェック
Wait C 50
ノズル有無チェックレーザ Once
ノズル有無チェック
Wait C 50
100
ノズル回転チェック
項目
動作
備考
ノズル装着位置へ移動(開始)
項目
動作
備考
レーザ
Z軸
レーザ
Z軸
Blow
Z軸
Blow
Z軸
スライドプレート
XY
Z軸
Z軸
Vacセンサ
Vac
XY
レーザ
Z軸
XY
レーザ計測高さ(No)へ移動(完了)
Close(開始)
Once
レーザ計測高さ(装着)へ移動(開始∼完了)
Once
XY移動高さへ移動(開始∼完了)
吸着位置へ移動(開始∼完了)
On
ノズル詰まりチェック
Off
On
レーザ計測高さ(No)へ移動(開始)
Off
ノズル装着位置へ移動(完了)
交換高さへ移動(開始∼完了) (2段階制御)
スライドプレート移動高さへ移動(開始∼完了)
Open(開始)
XY移動高さへ移動(開始∼完了)
Once
レーザ計測高さ(有無)へ移動(開始∼完了)
Once
On
Close(開始)
On
交換高さへ移動(開始∼完了)
レーザ計測高さ(有無)へ移動(開始∼完了)
Blow
ノズル返却位置へ移動(開始)
プリロード
Open(開始)
On
ノズル返却位置へ移動(完了)
レーザ計測高さ(回転)へ移動(開始∼完了)
Sweep
返却角度に回転(開始∼完了)
Z軸
Z軸
レーザ
Z軸
Z軸
Blow
スライドプレート
Closeセンサ
XY
Z軸
レーザ
θ軸
XY
θ
スライドプレート
Openセンサ
Z軸
スライド
プレート
Open
4
12
D
14
211
レーザ計測高さ(有無)へ移動(開始∼完了)
Vac On
9
A
停止
レーザ
計測
9
168
17 19
Vacuum
センサ
検知
非検知
19
12
D
Blow
On
Off
Vacuum
On
Off
14
B
Close
センサ
On
Off
Open
センサ
On
5
A
Off
13
Close
非計測
8
XY
移動
1
停止
移動
停止
回転
非検知
Off
On
Off
検知
10
Z
移動
3
停止
11 15 C
停止
16
θ
レーザ
Vacuum
センサ
Close
On
Off
On
Off
On
Blow
Close
センサ
Vacuum
Open
センサ
XY
Z
計測
非計測
Open
停止
移動
4
5
1
スライド
プレート
6C7 13
21
θ
回転
210
3 151820
ノズル装着動作(θ補正有無共通)
ノズル返却動作(θ補正有)
Wait A 100
Wait B
18
17
Wait D 20
s
移 动
停止
移 动
停止
移 动
停止
移 动
停止
转动
停止
转动
停止
测 定
非 测 定
测 定
非 测 定
激光激光
滑 动 板滑 动 板
传 感器
传 感器
传 感器
传 感器
传 感器传 感器
测 定
非 测 定
测 定
非 测 定
吸嘴退回动作(有θ 修正)
吸嘴安装动作(有无θ 修正共同)
吸嘴安装动 作 ( 有无θ 修正共同)吸嘴退回动 作 ( 有 θ 修正)
电 考 电 考动 作动 作项 目
轴 轴
轴
轴
轴
轴
轴
轴
轴
轴
轴
轴
轴
轴
滑板
滑板
滑板
滑板
激光
激光
激光
激光
激光
激光
传感器
传感器
传感器
传感器
向吸嘴安装位置移动 ( 开 始 )向吸嘴退回位置移动 ( 开 始 )
向吸嘴退回位置移动 ( 完了)
向吸嘴安装位置移动 ( 完了)
向激光测 定高度( 有无) 移 动 ( 开 始∼完了)向激光测 定高度( 有无) 移 动 ( 开 始∼完了)
预载
( 开 始 )
向激光测 定高度( 转动) 移 动 ( 开 始∼完了)
向退回角度转动( 开 始∼完了)
向滑板移动 高度移动 ( 开 始∼完了)
( 开 始 )
向激光测 定高度( 有无) 移 动 ( 开 始∼完了)
向 XY移 动 高度移动 ( 开 始∼完了)
检查有无吸嘴
检查吸嘴转动
检查有无吸嘴
向更换 高度移动 ( 开 始∼完了)(2级 控制)
向滑板移动 高度移动 ( 开 始∼完了)
( 开 始 )
检查吸嘴堵塞
向激光测 定高度(No )移动 ( 开 始 )
向激光测 定高度(No )移动 ( 完了)
向激光测 定高度( 安装) 移 动 ( 开 始∼完了)
向吸附位置移动 ( 开 始∼完了)
向 XY移 动 高度移动 ( 开 始∼完了)
( 开 始 )
检查吸嘴安装
检查吸嘴No
检查有无吸嘴
项 目
向更换 高度移动 ( 开 始∼完了)
3-
10
Rev0.00
动作说明书
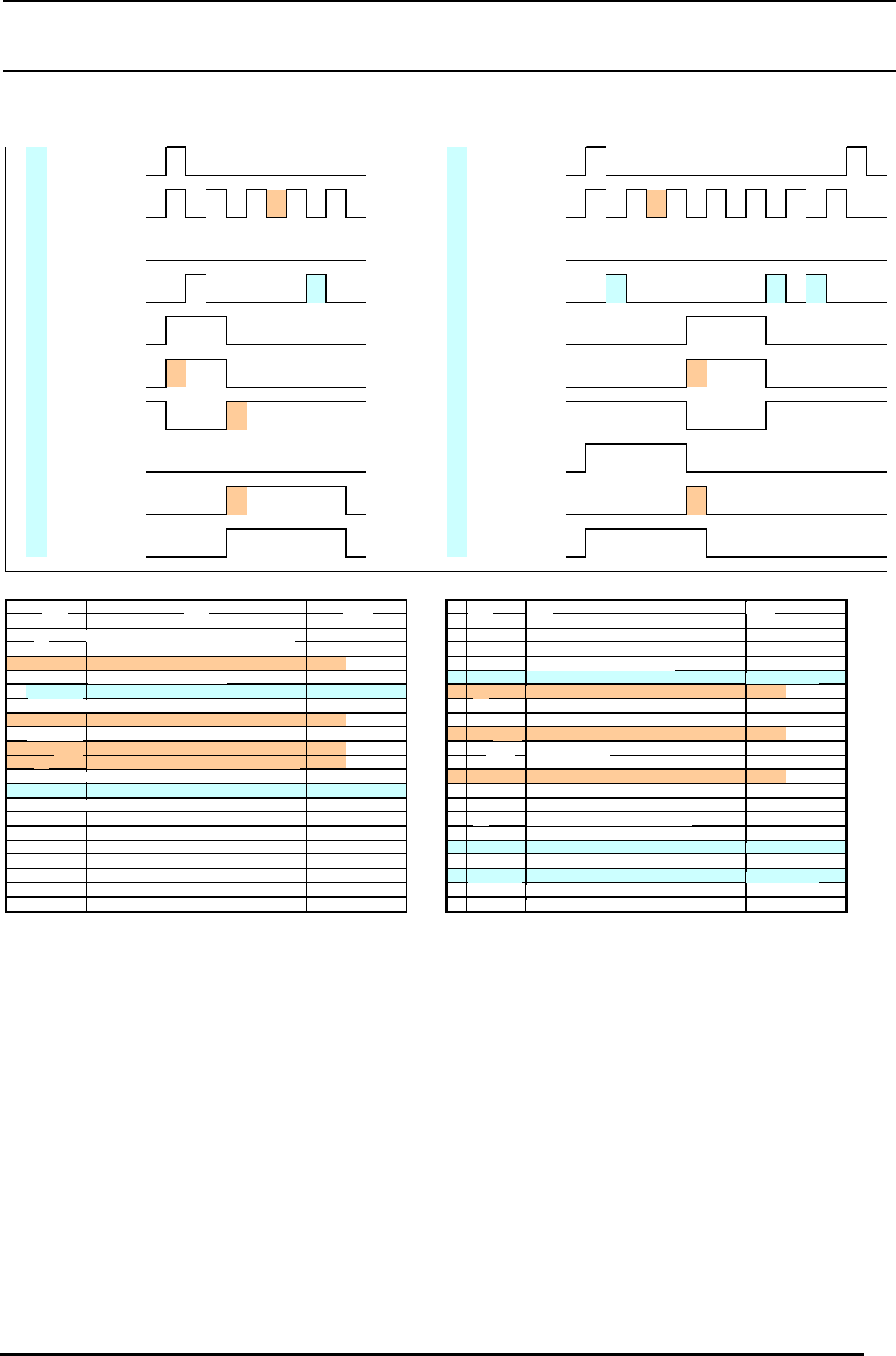
3-3-2 无θ修正传
ノズル返却動作 ノズル装着動作(θ補正有無共通)
1 1
2 2
3 3
4ms4
5 5
6 6m
7 7
8ms8スライドプレート
9 9Openセンサ ms
10 ms 10
11 ms 11
12 12 ms
13 13
14 14
15 15
16
17
18
19
20
21
6
5
項目
動作
備考
ノズルNoチェック
ノズル装着チェック
備考
Z軸 レーザ計測高さ(有無)へ移動(開始∼完了)
レーザ Once
Once
Z軸 XY移動高さへ上昇(開始∼完了)
Blow Off
ノズル有無チェック
スライドプレート移動高さへ下降(開始∼完了)
On
Close(開始)
レーザ計測高さ(有無)へ移動(開始∼完了)
ノズル返却位置へ移動(開始)
Open(開始)
On
ノズル返却位置へ移動(完了)
On
交換高さへ下降(開始∼完了)
ノズル有無チェック
Z軸
Blow
スライドプレート
Closeセンサ
Z軸
Z軸
レーザ
XY
スライドプレート
Openセンサ
XY
項目
20
XY ノズル装着位置へ移動(開始)
動作
Wait D
Vac On
検知
非検知 非検知
10
100
Vacuum
センサ
Z軸 レーザ計測高さ(有無)へ移動(開始∼完了)
XY ノズル装着位置へ移動(完了)
Vacuum
センサ
検知
Off Off
12
D
14
Wait A
8
D
Blow
On
レーザ Once
Z軸 交換高さへ移動(開始∼完了) (2段階制御)
Blow
On
Off Off
112
50Wait C
Vacuum
On
スライドプレート移動高さへ移動(開始∼完了)
Open(開始)
On
Z軸
Vacuum
On
Off
ノズル有無チェック
10
B
Close
センサ
On
Vacセンサ
Vac Off
ノズル詰まりチェック
Close
センサ
On
Off
Off
9
A
Open
センサ
On
Blow On
Z軸 レーザ計測高さ(No)へ移動(開始)
Open
センサ
On
4
A
Off
8169
スライド
プレート
Open
Blow
Z軸 レーザ計測高さ(No)へ移動(完了)
Off
スライド
プレート
Open
3
Close
1951713 レーザ
スライドプレート Close(開始)
レーザ Once
レーザ
計測
非計測
停止 停止
θ
Z軸 レーザ計測高さ(装着)へ移動(開始∼完了)
レーザ Once
θ
回転
停止 停止
18 2013C12711 Z
移動
315
Z軸 XY移動高さへ移動(開始∼完了)
XY 吸着位置へ移動(開始∼完了)
Z
移動
2
21
停止 停止
4
6
15
移動
回転
計測
非計測
Close
XY
ノズル装着動作(θ補正有無共通)
XY
移動
1 1
C7
Wait A 100
Wait B 100
Wait C 50
ノズル返却動作(θ補正無)
Wait D 20
14
s
吸嘴退回动作(无θ 修正)
移 动
停止
移 动
停止
移 动
停止
移 动
停止
转动
停止
转动
停止
测 定
非 测 定
测 定
非 测 定
吸嘴安装动作(有无θ 修正共同)
激光 激光
滑 动 板
滑 动 板
传 感器
传 感器
传 感器
传 感器
测 定
非 测 定
测 定
非 测 定
传 感器 传 感器
吸嘴安装动 作 ( 有无θ 修正共同)
吸嘴退回动 作
项 目动 作 动 作 电 考电 考
轴
轴
轴
轴
轴
轴
轴
轴
轴
轴
轴
轴
向吸嘴退回位置移动 ( 开 始 )
向激光测 定高度( 有无) 移 动 ( 开 始∼完了)
向吸嘴退回位置移动 ( 完了)
( 开 始 )滑板
滑板
滑板
滑板
激光
激光
激光
激光
激光
传感器
传感器
传感器
传感器
向滑板移动 高度下降( 开 始∼完了)
( 开 始 )
( 开 始 )
( 开 始 )
检查有无吸嘴
检查有无吸嘴
检查有无吸嘴
检查吸嘴安装
检查吸嘴No
向 XY移 动 高度上升( 开 始∼完了)
向激光测 定高度( 有无) 移 动 ( 开 始∼完了)
向更换 高度下降( 开 始∼完了)
项 目
向吸嘴安装位置移动 ( 开 始 )
向激光测 定高度( 有无) 移 动 ( 开 始∼完了)
向吸嘴安装位置移动 ( 完了)
向更换 高度移动 ( 开 始∼完了)(2级 控制)
向滑板移动 高度移动 ( 开 始∼完了)
检查吸嘴堵塞
向激光测 定高度(No )移动 ( 开 始 )
向激光测 定高度(No )移动 ( 完了)
向吸附位置移动 ( 开 始∼完了)
向 XY移 动 高度移动 ( 开 始∼完了)
向激光测 定高度(安装)移动 ( 开 始∼完了)
3-
11
Rev0.00
动作说明书
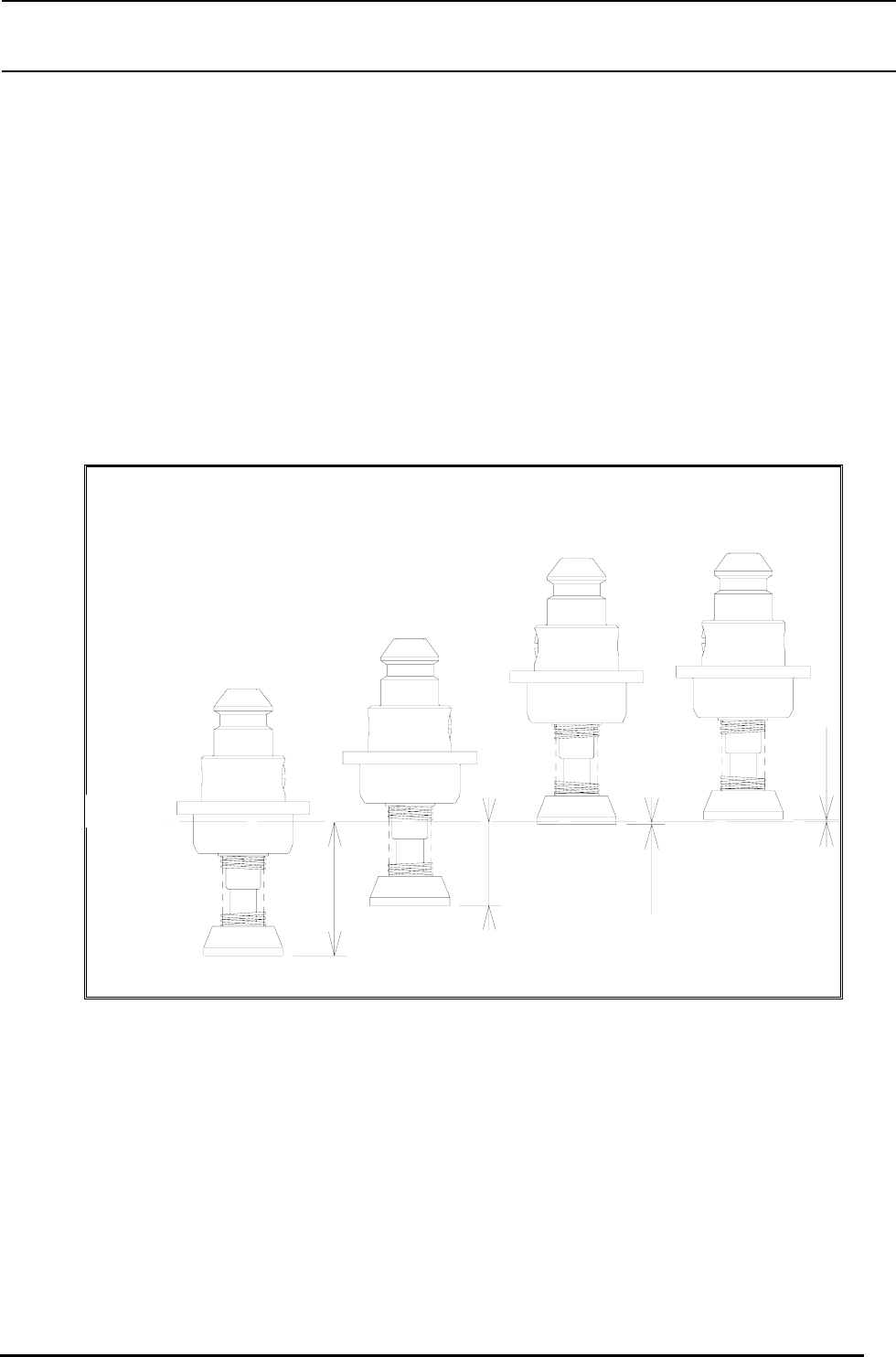
3-3-3 激光测定
用激光的各关测定有以下 4 关。(高度请参照下传)
・Sweep(检查吸嘴旋转)
检测吸嘴的旋转角度,检查生产中吸嘴有无旋转。
・Once(检查有无吸嘴)
确认吸嘴是否安装。。
・Once(检查吸嘴号码)
通过吸嘴前端直径确认吸嘴号码。
・Once(检查吸嘴安装情况)
确认吸嘴确实地安装着。
レーザ高さ
Once
(装着チェック)
Once
(Noチェック)
Sweep
(回転チェック)
16mm
0.3mm
0.3mm
Once
(有無チェック)
10mm
激光高度
Once
(检查旋转)
Once
(检查有无)
Once
(检查 No.)
Once
(检查安装)
3-
12