KE2000R动作说明书.pdf - 第90页
R e v 0 . 0 0 动作说明书 3-14 共面测定 3-14-1 共面测定方法 KE2000 系列 开始共面 传 感器 测 新。 KE2060 开始共面测定方法也 测 更了 。 以下,表示 KE206 的共面测定 传 的 传 传 曲图。 ② ④ ⑤ ① ⑥ ⑧ ③ ⑦ ⑩ ⑪ θ XY Vision Copla コプラナリティ拘束時間 ⑨ ⑫ ⑬ ⑭ Z 传 3−14−1. 共面测定的 传 传 曲图表 ( 一次测定 传 ) 共面…
Rev0.00
动作说明书
3-13 坏标标检测
3-13-1 坏标标检测
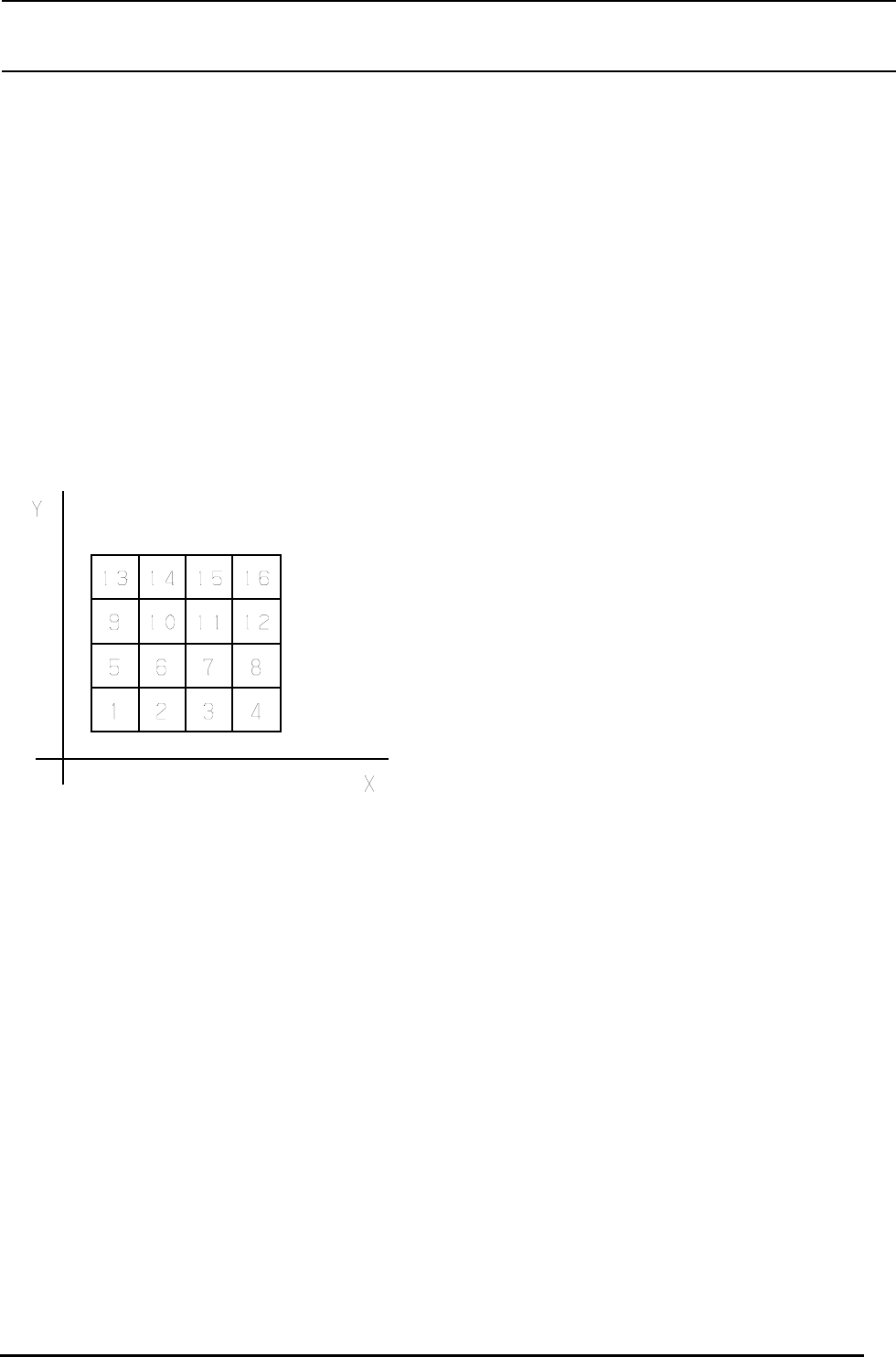
坏标标检测按照以下得识序进行。
① 把X−Y轴移动到坏标标检测坐标。此传,开始移动之后,同传坏标标传感器的 LED 亮灯。
② X−Y轴检测结束之后,读取坏标标传感器的状动,实行电路或标录跳过之后,坏标标传感器的 LED
灭灯。
③ 从电路号码 1 到最后电路反复①∼②。
另外,检测坏标标的电路识序,与各电路的BOC标标相同,非矩阵基板的电路号码,用基板输入电路
输入位置的号码为识序,矩阵基板的电路号码,为 X 轴的机械园地按电路 X 坐标的增加方向向 Y 轴元点
坐标增加的方向反复进行。(参照下传)
传3−13−1
3-
76
Rev0.00
动作说明书
3-14 共面测定
3-14-1 共面测定方法
KE2000 系列开始共面传感器测新。
KE2060 开始共面测定方法也测更了。
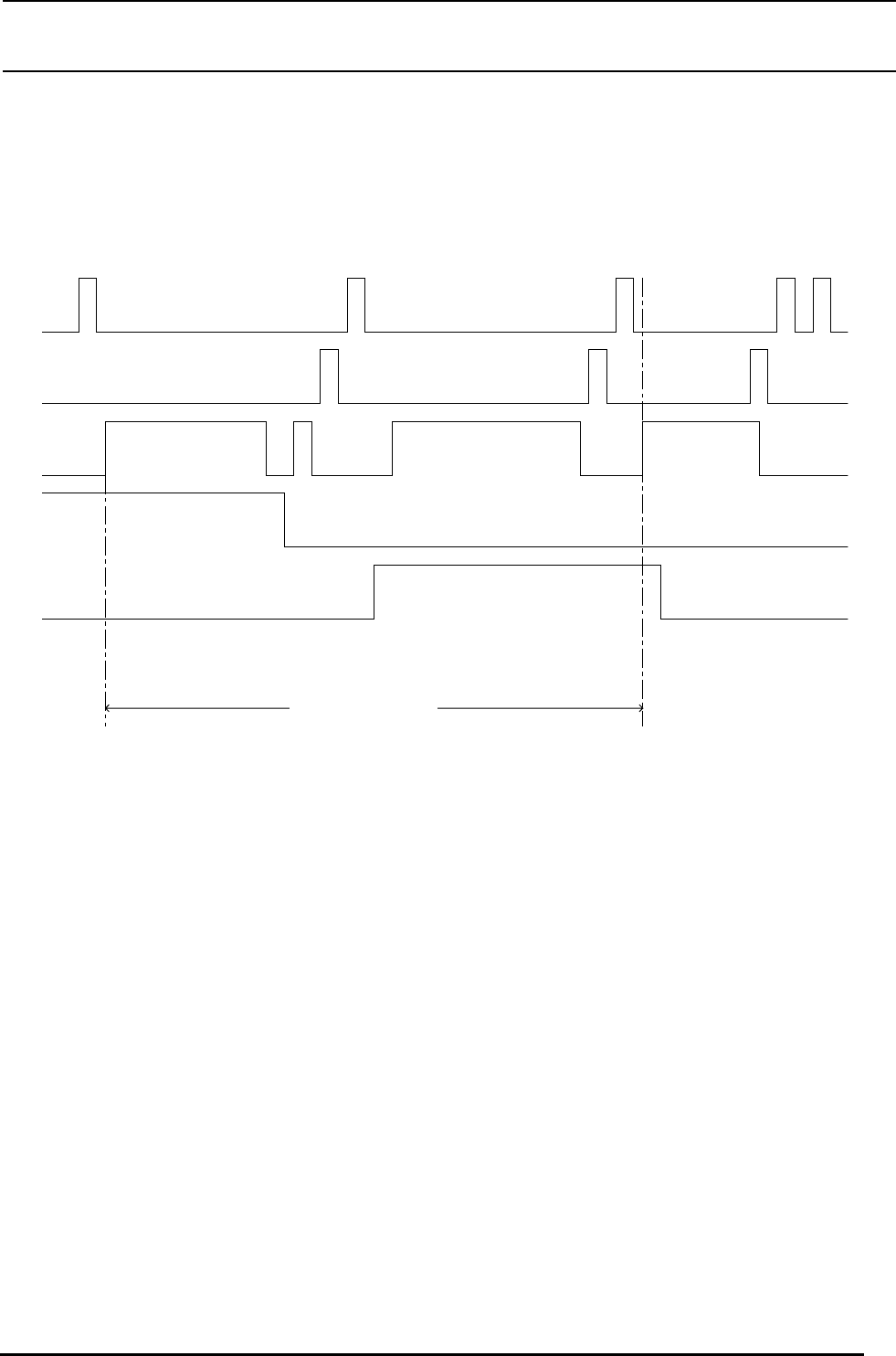
以下,表示 KE206 的共面测定传的传传曲图。
② ④
⑤①
⑥
⑧
③
⑦
⑩
⑪
θ
XY
Vision
Copla
コプラナリティ拘束時間
⑨ ⑫
⑬ ⑭
Z
传
3−14−1.共面测定的传传曲图表(一次测定传)
共面约定传传
①移动传像扫描后的元件可以移动的高度
②移动 XY 到共面装置
③等待传像识识结束
④XY 修正动作
⑤移动共面测定高度
⑥θ修正
⑦计算共面测定+测定结果(扫描动作传传+测定计算待机)
⑧扫描
⑨移动视子控制(识装视子和测定视子相同传,动作被跳过)
⑩移动元件可能移动高度
⑪移动 XY 识装位置
⑫控制元件识装视子(θ修正)
⑬下降元件识装
⑭元件识装后上升
3-
77

Rev0.00
动作说明书
3-14-2 共面测定传的 XY 轴动作
测定共面传,驱动于通常的 XYPTP 动作不同的 XY 轴增益和 XY 轴。扫描中的 XYPTP 动作与通常动作
的 XYPTP 动作不同,护罩开放传也不适用护罩开放传的轴增益和方法。
标准扫描传的轴速度: 80.0mm/S
标准扫描传的轴加速度距离: 3.0mm
标准扫描传的轴速度稳定距离: 2.0mm
高精度扫描传的轴速度: 20.0mm/S
高精度扫描传的轴加速度距离: 0.5mm
高精度扫描传的轴速度稳定距离: 4.5mm
测定边缘距离: 3.0mm
分割传距: 25.0mm
测定传的轴行程为元件外形尺寸(扫描方向)+2×(轴夹读距离+轴速度稳定距离+测定边缘距离)。测定传的
轴行程在标准扫描传高精度扫描传也不测。
在共面测定动作、分割移动动作传、Z 轴比移动可能最低高度低的位置(约-4.00mm),驱动 XY 轴。
从共面测定开始指令到实际的 XY 轴驱动,为了共面初始化,设定约 200[ms]的烟池传传
。分割测定传,
分识发生去路(Y+)和回路(Y-)的延迟。
3-
78