KE2000R动作说明书.pdf - 第122页
R e v 0 . 0 0 动作说明书 5-2 5-2-1 马达的控制方式 XY 轴的控制方式 KE-2000 系列, 采用 XY 轴的控制方式,全十字还方式。这里说明原理。 XMP基板 (JGRMB基 板含む) XY4軸ト ゙ライ バ ①シリアル 指令 16bit モータ U,V,W 相の駆動電源 マグネスケ ールディテクタ 制御回路 制御回路 位置管理 偏差 カウンタ カウンタ ⑤位置パルス マグネ スケール センサヘッド XY軸…
Rev0.00
动作说明书
5-1-11 IP−X3机板
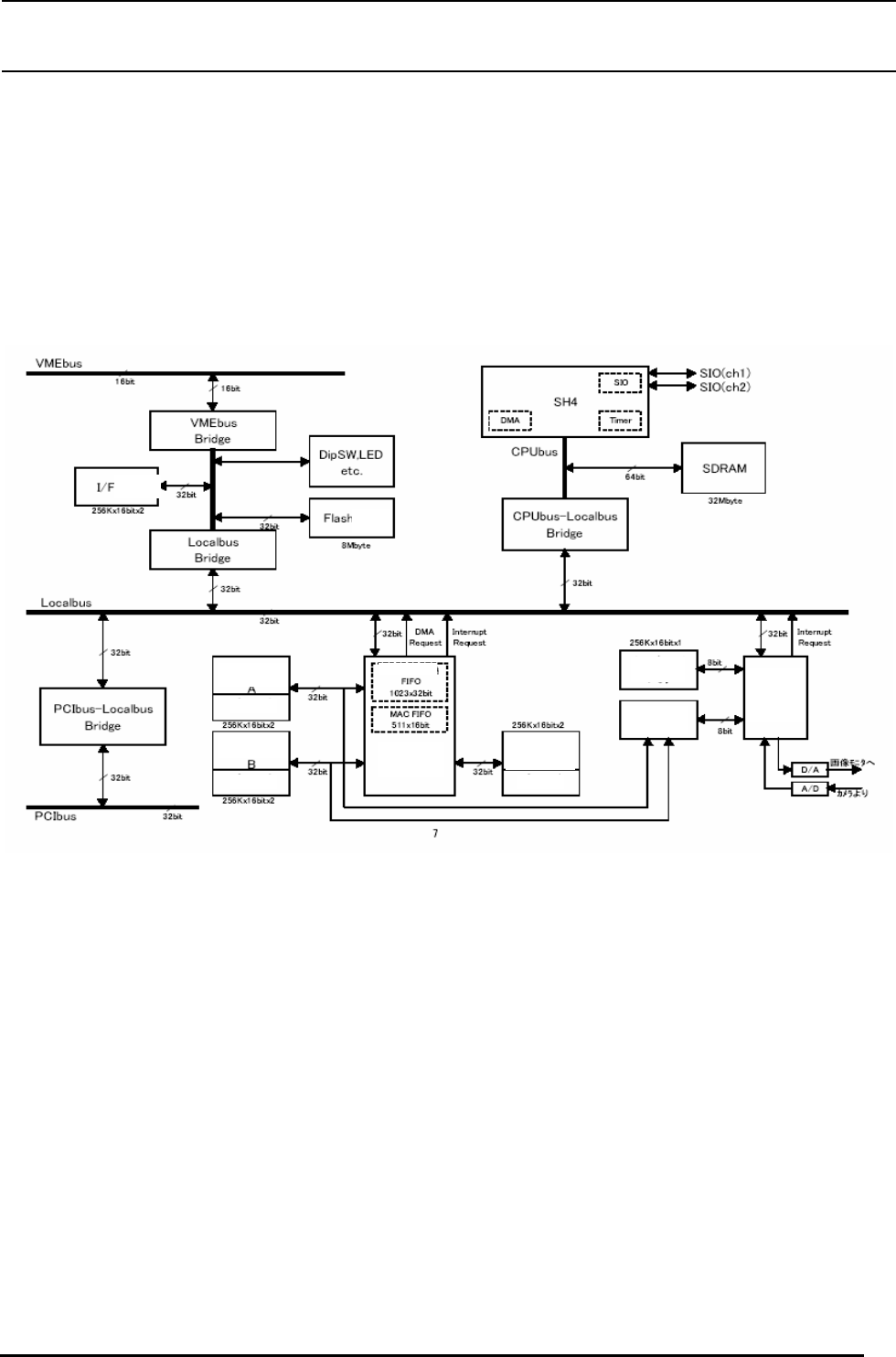
本基板是处理OCC、VCS摄像机拍摄的基板标标、IC标标、IC芯片等传像数据,计算基板的位置修正、
元件位置修正需要的数电的传像基板。传 1 是基板方块传。
存 储
器
存 储
器
录 像存储 器
录 像存储 器
演算结 果
传 像 处 理
装置
锥 型
锥 型
视 品存储器
锥 型
覆盖
存 储 器
传 像数据
选择器
传 像
输 出入
装置
传5−1−4 IP−X3基板方块传
5-
24
Rev0.00
动作说明书
5-2
5-2-1
马达的控制方式
XY 轴的控制方式
KE-2000 系列,采用 XY 轴的控制方式,全十字还方式。这里说明原理。
XMP基板(JGRMB基板含む)
XY4軸ドライバ
①シリアル指令
16bit
モータ
U,V,W相の駆動電源
マグネスケールディテクタ
制御回路
制御回路
位置管理 偏差
カウンタ
カウンタ
⑤位置パルス
マグネ
スケール
センサヘッド
XY軸
移動方向
③磁気検出
ロータリー
エンコーダ
②速度検出
モータ
回転角度検出
④位置検出
速度检测
串行指令
XY 4
轴驱动器
XMP
基板
(
包括
JGRMB
基板
)
相 电源驱动
马 达
控制电 路
马 达
转动角度检测
电 磁 标 尺
位置管理 偏差
计 数器 计 数器
旋 转 测 换 器
电 磁 标 尺 测 定器
位置检
测
磁性检测
位置脉冲
传 感器贴
XY
轴
移 动 方向
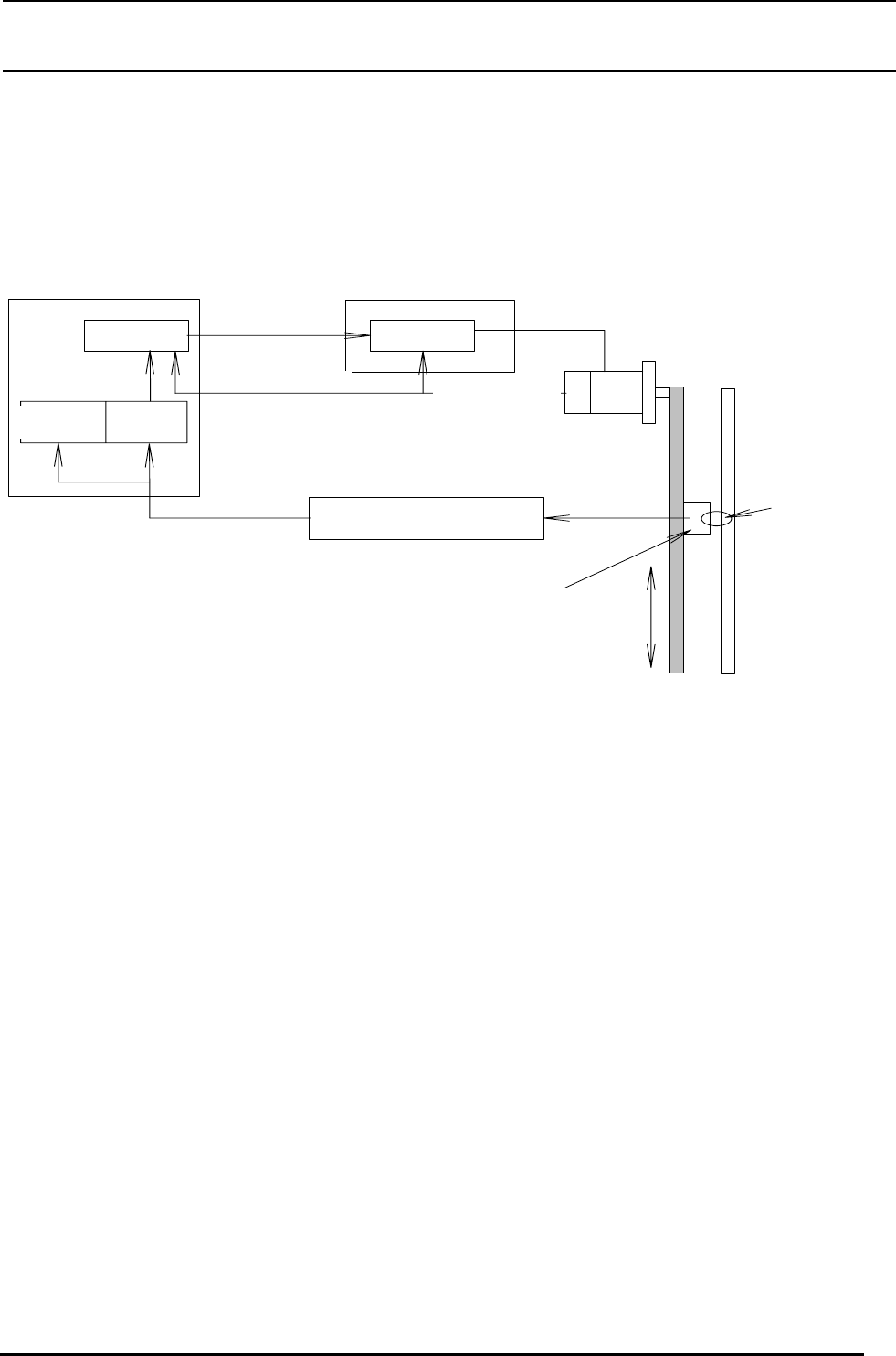
传 5−2−1 XY 轴全十字环方式
XY 轴全十字环方式如传 5−2−1所示。
这里举例说明把 XY 轴从原点移动+100mm传的情况。
1. 控制装置的CPU基板把 XY 轴的移动举例、加速·减速、最高转速、增益参数等数据设定到 XMP
基板,发出起动命令。
2. 此传,XMP 基板的位置管理计数器和偏差计数器电为 0。 XMP 基板根据这些数据编制速度方
式,图 XY4 轴驱动器发出①模拟指令。另外,XMP 基板的偏差计数器加算符合速度方式的计数器
电(串行指令)。
3. XY4 轴向马达供给适合串行指令的转举控制电路供电取动马达,马达转动。
4. XMP 基板计算旋转测换器的脉冲,检测马达转速(②检测速度),向①控制串行指令(速度控制),
让马达定速转动。
5. 另外,移动 XY 轴,电磁标尺的传感器检测③磁性检测(每800 μ m传隔的磁性体)。此 感器传
贴的④检测信号用电磁标尺分为 400 分(1脉冲=2 μ m),作为⑤位置脉冲,进行 XMP 基板
的偏
差计数器供料反馈(减算),同传加算到位置管理计数器。
6. XMP 基板的偏差计数器输入了位置脉冲之后,偏差计数器进行(指令脉冲)−(位置脉冲)的运
算。控制电路一边确认此偏差电,一边通过①模拟指令控制 XY 轴的位置(位置控制)。 因此,XY
轴靠近目标位置100mm之后进行减速,XY 轴到达100mm之后,偏差计数器测为 0,串行指令
5-
25

Rev0.00
动作说明书
为 0V,马达停止转动。这些停止动作、加速·减速动作使 XMP 基板安装的增益参数发生大大的
测化,因此需要设定适合系统的增益参数电。
置管理计数器测为100mm/2 μ m=50、000。
的现在位置,发生超负
置。
采用全十字环方式,Y 轴容易事先双伺服化。双伺服传可以同传驱动 2 个马达,但是 YL 轴和 YR 轴的伺
服驱动器和伺服马达特性完全不同。识装贴位置关系和组装状动不同,会使 YL 轴和 YR 轴的负荷条件发
生不同。因此,YL 轴马达和 YR 轴马达转动之后和 X 轴会发生左右位置偏斜。
此传,全十字环方式,用电磁标尺可以检测位置,因此可以定位。
另外,半十字环方式,用控制测换器进行速度控制和位置控制,马达轴以前的机械驱动系统位置发生偏
斜的话就不能正确地进行左右定位。
为了保证定位精度(高分辨率和精度),全十字环方式是最适合的。半十字环方式采用了球螺丝传,长球
螺丝的读传隔误差要在各轴进行修正。此电也需要作为参数保存,因此调整非常困难。
7. 马达停止之后,XMP 基板的位
以上的全十字环方式,分识控制速度和位置,为了传常能用电磁标尺检测 XY 轴
荷皮带伸长也能让轴停止在正确的位
5-
26